Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Arduino-библиотека AccelStepper
Стандартной библиотеки Stepper вполне достаточно для простого применения с одним двигателем. Библиотека AccelStepper значительно улучшает стандартную библиотеку Stepper, позволяя подключать несколько шаговых двигателей с управляемым ускорением и замедлением. Можно создать несколько объектов AccelStepper, давая уникальное имя каждому двигателю.
Контрольные вопросы: 1. Как осуществляется управление шаговым двигателем? 2. Какие достоинства и недостатки шаговых двигателей? 3. Какие функции библиотеки Stepper используются? 4. Какие функции библиотеки AccelStepper используются? Лекция 53 Ардуино и сервоприводы Цели лекции: 1. Изучение принципа работы сервопривода. 2. Изучение функции attach() библиотеки Servo. 3. Изучение функции detach() библиотеки Servo. 4. Изучение функции write(int) библиотеки Servo. 5. Изучение функции writeMicrosconds(int) библиотеки Servo. 6. Изучение функции read() библиотеки Servo. 7. Изучение функции attached() библиотеки Servo.
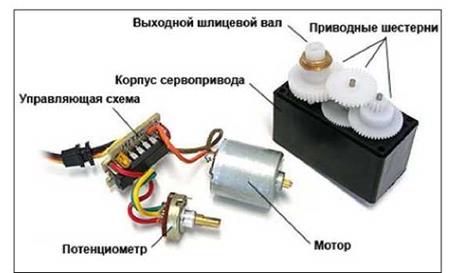
Сервоприводы Сервопривод, она же серва, servo, рулевая машинка — устройство, обеспечивающее преобразование сигнала в строго соответствующее этому сигналу перемещение (как правило, поворот) исполнительного устройства. Представляет собой прямоугольную коробку с мотором, схемой и редуктором внутри и выходным валом, который может поворачиваться на строго фиксированный угол, определяемый входным сигналом. Как правило, этот угол имеет предел в 60 градусов, иногда в 180. Бывают сервоприводы и постоянного вращения. На вал надевается рычаг в форме круга, крестовины или перекладинки для передачи вращающего движения на рабочий орган. После поворота вал остается в том же положении, пока не придет иной управляющий сигнал. Смысл сервопривода в гарантированном выполнении заданной команды. Если внешняя сила не позволит выполнить поворот на нужный угол, сервопривод все равно закончит движение после окончания действия мешающего внешнего воздействия. Воспрепятствовать этому может лишь разрушение сервопривода, снятие внешнего управляющего сигнала или пропадание напряжения питания. Большинство сервоприводов внешне похожи друг на друга— как правило, это прямоугольный корпус (внутри которого прячутся мотор, шестерни и управляющая схема) с крепежными ушками по бокам и выходным валом, расположенным на верхней крышке. Внешний вид сервопривода изображен на рисунке 53.1.
К валу крепится сменный (идущий в комплекте) передаточный элемент в виде диска (с отверстиями по кругу), крестовины с отверстиями на концах всех его перекладин или рычага, насаженного на выходной вал либо своим центром, либо одним из концов. Как правило, этот сменный элемент белого цвета. Иногда сервопривод имеет форму цилиндра — тогда его верхняя часть при работе поворачивается вокруг своей оси. Некоторые сервоприводы вместо выходного вала оснащаются шкивом (катушкой). На такой шкив наматывается (или с него сматывается) тросик, с помощью которого управляют каким-то внешним приспособлением — например, парусом в моделях судов или яхт.
Рисунок 53.1-Сервопривод
Сервопривод — электрическое исполнительное устройство. Он подключается с помощью трех проводов к управляющему устройству (драйверу или контроллеру) и источнику питания. По способу управления сервоприводы подразделяются на аналоговые и цифровые. Аналоговые управляются аналоговым сигналом — буквально частотой, параметры которой задаются с помощью широтно-импульсной модуляции (ШИМ). Цифровые сервоприводы управляются цифровым сигналом, представляющим собой кодовые команды, передаваемые по последовательному интерфейсу. Аналоговые сервоприводы намного дешевле цифровых. Сервопривод управляется с помощью импульсов переменной длительности. Для посылки импульсов используется сигнальный провод. Параметрами этих импульсов являются минимальная длительность, максимальная длительность и частота повторения. Из-за ограничений во вращении сервопривода нейтральное положение определяется как положение, в котором сервопривод обладает одинаковым потенциалом вращения в обоих направлениях. Важно отметить, что различные сервоприводы обладают разными ограничениями в своем вращении, но они все имеют нейтральное положение, и это положение всегда находится в районе длительности импульса в 1,5 миллисекунды (1,5 мс). Угол поворота определяется длительностью импульса, который подается по сигнальному проводу. Это называется широтно-импульсной модуляцией. Сервопривод ожидает импульса каждые 20 мс. Длительность импульса определяет, насколько далеко должен поворачиваться мотор. Например, импульс в 1,5 мс диктует мотору поворот в положение 90 градусов (нейтральное положение).
Когда сервопривод получает команду на перемещение, его управляющий орган перемещается в это положение и удерживает его. Если внешняя сила действует на сервопривод, когда он удерживает заданное положение, сервопривод будет сопротивляться перемещению из этого положения.
Максимальная величина силы, которую может выдерживать сервопривод, характеризует вращающий момент сервопривода. Однако сервопривод не навсегда удерживает свое положение, импульсы позиционирования должны повторяться, информируя сервопривод о сохранении положения. Когда импульс, посылаемый на сервопривод, становится короче 1,5 мс, сервопривод поворачивает выходной вал на несколько градусов против часовой стрелки и удерживает это положение. Когда импульс шире, чем 1,5 мс, выходной вал поворачивается на несколько градусов в противоположном направлении. Минимальная и максимальная ширина импульса, который управляет сервоприводом, является свойством конкретного сервопривода. Различные марки, и даже различные сервоприводы одной марки, обладают различным минимумом и максимумом. Как правило, ширина минимального импульса составляет примерно 1 мс и ширина максимального импульса — 2 мс. Различаются сервоприводы и габаритами. Существуют так называемые стандартные сервоприводы. Их габариты и вес в общем модельном ряду соответствуют некоторым средним значениям. Они самые дешевые — в пределах 10-20 долларов. При уменьшении или увеличении размеров сервопривода в сторону от "стандартного" цена сервопривода возрастает пропорционально отклонению размеров. Как и самые маленькие (микросервы), так и самые большие (супермощные) сервоприводы, — это самые дорогие устройства, цена их может доходить до сотен долларов. Сервоприводы различаются также материалом шестеренок. Самые дешевые сервоприводы оснащены шестернями из пластмассы. Более дорогие — с одной выходной шестерней из металла. Самые дорогие — с металлическими шестернями. Соответственно виду материала изменяется нагрузочная способность сервопривода. Самый слабый сервопривод — с пластиковыми шестернями, самый мощный — с металлическими.
Различия сервоприводов определяются и типом подшипников. Самые дешевые не имеют подшипников вообще. Пластмассовые шестерни на пластмассовых валах крутятся в отверстиях пластмассовых пластин, соединяющих шестерни в единый редуктор. Это самые недолговечные сервоприводы. Более дорогие сервоприводы имеют металлическую, обычно латунную, втулку на выходном валу. Эти сервы более долговечны. Еще более дорогие сервы имеют настоящий подшипник на выходном валу, на который приходится самая большая нагрузка. Подшипник может быть шариковым или роликовым. Шариковый дешевле, роликовый компактнее и легче. В самых дорогих сервоприводах на всех (металлических!) шестернях стоят подшипники. Это — самые долговечные и надежные устройства. Сервоприводы различаются и по толщине. Она может сильно варьироваться при одинаковых размерах по высоте и длине. Чем меньше толщина, тем выше цена, поскольку в узком корпусе труднее разместить шестерни.
Наконец, сервоприводы различаются по фирме-производителю. Самые раскрученные бренды продают самые дорогие сервоприводы. При этом в их ассортименте будут и самые дорогие, и самые дешевые, но даже самый простенький и дешевый стандартный сервопривод крупного бренда стоит дороже, иногда существенно дороже, чем аналогичный сервопривод с наклейкой менее раскрученного имени и, тем более, с именем никому не известной фирмы. Очень мощные и очень дорогие сервоприводы могут иметь любую внешнюю форму, определяемую назначением сервопривода. Так, сервоприводы для андроидов (человекоподобных роботов) могут быть шаровидными или дисковидными. Но обычно сервопривод — это все-таки черный параллелепипед с белой фитюлькой на верхней крышке.
Сервоприводы применяются в основном в промышленности (манипуляторы, станки и т. п.). В них установлены, как правило, мощные двигатели, в том числе шаговые, что позволяет использовать их в автоматических манипуляторах (в промышленных роботах). Сервоприводы для моделирования имеют гораздо более худшие характеристики, чем промышленные. Основным их параметром является момент сил, приложенных к "качалке" на заданном расстоянии от оси. Обычно такой момент измеряется в кг/см. Самые "слабые" сервоприводы тянут 1‑2 кг/см. Самые мощные не промышленные сервоприводы — более 100 кг/см. Момент также зависит от питающего напряжения. Немаловажным параметром является и скорость вращения вала сервопривода. Как правило, она измеряется в сек/60°. Скорость сервопривода обычно важна, если он применяется совместно с гироскопом или акселерометром (например, в моделях вертолетов).
|
|||||||
|
|
Последнее изменение этой страницы: 2021-02-07; просмотров: 494; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.149.243.32 (0.007 с.) |