Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Определение понятия «Электропривод». Структурная схема электропривода. Классификация электроприводов.Стр 1 из 17Следующая ⇒
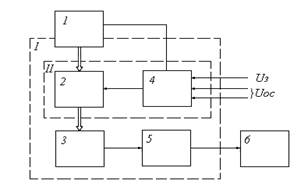
Определение понятия «Электропривод». Структурная схема электропривода. Классификация электроприводов. Электроприводом (ЭП) называется электромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного и управляющего устройств и предназначенная для приведения в движение рабочих органов машин и управления этим движением (по ГОСТ 16593-79). Электроприводы подразделяются на групповые, индивидуальные и взаимосвязанные. В групповом приводе один электродвигатель приводит в движение с помощью разветвленной передачи группу механизмов или рабочих органов одного механизма. Кинематическая схема такого привода громоздкая, а сам привод неэкономичен, поэтому находит ограниченное применение. В индивидуальном приводе электродвигатель приводит в движение только один рабочий орган. Кинематическая схема механизма с таким приводом существенно упрощается, повышается экономичность и снижается металлоемкость механизма. Электродвигатель может встраиваться непосредственно в механизм. Взаимосвязанный привод обеспечивает работу одного механизма с помощью нескольких электродвигателей. Структурная схема электропривода приведена на рис.1.
Основной элемент электропривода — электродвигатель (ЭД), который преобразует электрическую энергию в механическую. Для получения электроэнергии требуемых параметров между двигателем и источником энергии включают силовой преобразователь. Управление преобразователем осуществляется от блока управления, на вход которого поступают задающий сигнал U з и сигналы U ос обратной связи (ОС), содержащие информацию о характере движения исполнительных органов, работе отдельных узлов, аварийных режимах. Преобразователь вместе с блоком управления образуют систему управления. Жирными стрелками на рис.1 показаны силовые каналы передачи электрической и механической энергии, а тонкими - каналы передачи сигналов управления. Классификация ЭП. Существует большое разнообразие эл.приводов. Их классификация обычно производится по виду движения и степени управляемости эл.привода, роду электрического и механического передаточных устройств, способу передачи механической энергии исполнительным органами ряду других признаков.
По виду движения различаются электроприводы вращательного и поступательного однонаправленного и реверсивного движения, а также электроприводы возвратно-поступательного движения. Эти движения могут иметь как непрерывный, так и дискретный характер. По принципам регулирования скорости и положения электропривод может быть: ü нерегулируемый (исполнительный орган приводится в движение с одной постоянной скоростью); ü регулируемый (путем воздействия на электропривод скорость движения исполнительного органа изменяется в соответствии с требованиями технологического процесса); ü следящий (с помощью электропривода воспроизводится перемещение исполнительного органа в соответствии с произвольно изменяющимся задающим сигналом); ü программно-управляемый (электропривод обеспечивает перемещение исполнительного органа в соответствии с заданной программой); ü адаптивный (электропривод автоматически обеспечивает оптимальный режим движения исполнительного органа при изменении условий его работы); ü позиционный (электропривод обеспечивает регулирование положения исполнительного органа рабочей машины). По роду механического передаточного устройства различают редукторный электропривод, содержащий один из видов механического передаточного устройства, и безредукторный, в котором электродвигатель непосредственно соединен с исполнительным органом. По роду электрического преобразовательного устройства различают: ü вентильный электропривод, преобразовательным устройством которого является вентильный преобразователь энергии. Разновидностями вентильного электропривода являются ионный и полупроводниковый электроприводы. Полупроводниковый электропривод, в свою очередь, делится на тиристорный и транзисторный электроприводы, преобразовательным устройством в которых является соответственно тиристорный или транзисторный преобразователь электроэнергии; ü система управляемый выпрямитель - двигатель (УВ - Д) — вентильный электропривод постоянного тока, преобазовательным устройством которого является регулируемый выпрямитель;
ü система преобразователь частоты - двигатель (ПЧ - Д) — вентильный электропривод переменного тока, преобразовательным устройством которого является регулируемой преобразователь частоты; ü система генератор - двигатель (Г - Д) и магнитный усилитель - двигатель (МУ - Д) -регулируемый электропривод, преобразовательным устройством которого является соответственно электромашинный преобразовательный агрегат или магнитный усилитель. По способу передачи механической энергии исполнительному органу электроприводы делятся на индивидуальный, взаимосвязанный и групповой. Индивидуальный электропривод характеризуется тем, что каждый исполнительный орган рабочей машины приводится в движение своим отдельным двигателем. Взаимосвязанный электропривод содержит два или несколько электрически или механически связанных между собой электроприводов. Частным случаем взаимосвязанного электропривода является многодвигательный электропривод, при котором несколько двигателей работают на общий вал, приводя в движение один исполнительный орган. Групповой электропривод характеризуется тем, что от одного двигателя приводится в движение несколько исполнительных органов одной или нескольких рабочих машин.
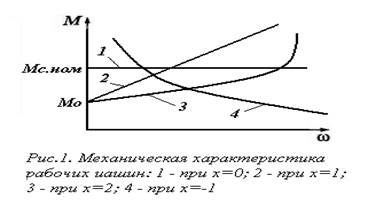
2. Механические характеристики рабочих машин. Механические характеристики электродвигателей. Механической характеристикой рабочей машины называется зависи-мость:М = f (ω), где М - момент сопротивления рабочей машины, Н•м; ω - угловая скорость, рад/с; ω=πn/30; π - частота вращения, об/мин. Большинство механических характеристик машин позволяет описать следующая эм-пирическая формула: М = М0 + (Мс.ном- М0)(ω/ωном)х, где М0 - начальный момент сопротивления при ω = 0; ω - текущее значение угловой ско-рости, соответствующее текущему значению момента М; Мс.ном- статический момент со-противления при ωном.
При х = 0 получается не зависящая от скорости механическая характеристика, для которой М = Мс.ном (прямая 1 на рис. 1). Такая характеристика у подъемных кранов, лебедок. К этой группе могут быть отнесены механизмы, у которых основное со-противление создают силы трения (навозоуборочные транспортеры, кормораздатчики, шнеки, конвейеры, барабаны сушилок, триеры). При х=1 получается линейно возрастающая характеристика (линия 2 на рис.1). Ею обладают многие машины, у которых основные сопротивления со-здаются силами трения совместно с аэродинамическими (молотилки, дробилки кормов, лесопильные рамы, зерноочистительные машины). Иногда такая ха-рактеристика называется генераторной, так как она присуща генераторам постоянного тока независимого возбуждения при постоянной нагрузке.
Если х=2, то момент сопротивления пропорционален квадрату угловой скорости (кривая 3 на рис.1). Такая характеристика называется вентилятор-ной. Так изменяется момент сопротивления вентиляторов, компрессоров, центробежных насосов, сепараторов, пневматических транспортеров и других механизмов, принцип работы которых основан на законах аэро- и гид-родинамики. Если х=-1, то получается нелинейно спадающая характеристика (кривая 4 на рис.1), для которой момент сопротивления изменяется обратно пропорцио-нально скорости, а мощность остается постоянной (такой характеристикой об-ладают металлорежущие станки, у которых с увеличением подачи скорость вращения деталей уменьшается).
Если х=2, то момент сопротивления пропорционален квадрату угловой скорости (кривая 3 на рис.1). Такая характеристика называется вентиляторной. Так изменяется момент сопротивления вентиляторов, компрессоров, центробежных насосов, сепараторов, пневматических транспортеров и других механизмов, принцип работы которых основан на законах аэро- и гидродинамики. Если х= -1, то получается нелинейно спадающая характеристика (кривая 4 на рис.1), для которой момент сопротивления изменяется обратно пропорционально скорости, а мощность остается постоянной (такой характеристикой обладают металлорежущие станки, у которых с увеличением подачи скорость вращения деталей уменьшается). Расчет и построение механической характеристики асинхронного электродвигателя (АД) по паспортным данным. Механическую характеристику асинхронного электродвигателя рассчитывают по уточненной формуле Клосса:
где
где Максимальный (критический) момент: где Номинальный момент: где
где Коэффициент Е:
Ток холостого хода:
Ток при максимальном (критическом) скольжении в относительных единицах:
Номинальный ток I н
Пересчет тока в именованные единицы:
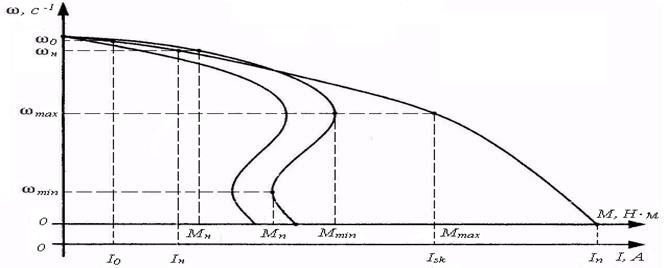
Графики механической и электромеханической характеристик имеют следующий вид:
Определение понятия «Электропривод». Структурная схема электропривода. Классификация электроприводов. Электроприводом (ЭП) называется электромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного и управляющего устройств и предназначенная для приведения в движение рабочих органов машин и управления этим движением (по ГОСТ 16593-79).
Электроприводы подразделяются на групповые, индивидуальные и взаимосвязанные. В групповом приводе один электродвигатель приводит в движение с помощью разветвленной передачи группу механизмов или рабочих органов одного механизма. Кинематическая схема такого привода громоздкая, а сам привод неэкономичен, поэтому находит ограниченное применение. В индивидуальном приводе электродвигатель приводит в движение только один рабочий орган. Кинематическая схема механизма с таким приводом существенно упрощается, повышается экономичность и снижается металлоемкость механизма. Электродвигатель может встраиваться непосредственно в механизм. Взаимосвязанный привод обеспечивает работу одного механизма с помощью нескольких электродвигателей. Структурная схема электропривода приведена на рис.1.
Основной элемент электропривода — электродвигатель (ЭД), который преобразует электрическую энергию в механическую. Для получения электроэнергии требуемых параметров между двигателем и источником энергии включают силовой преобразователь. Управление преобразователем осуществляется от блока управления, на вход которого поступают задающий сигнал U з и сигналы U ос обратной связи (ОС), содержащие информацию о характере движения исполнительных органов, работе отдельных узлов, аварийных режимах. Преобразователь вместе с блоком управления образуют систему управления. Жирными стрелками на рис.1 показаны силовые каналы передачи электрической и механической энергии, а тонкими - каналы передачи сигналов управления. Классификация ЭП. Существует большое разнообразие эл.приводов. Их классификация обычно производится по виду движения и степени управляемости эл.привода, роду электрического и механического передаточных устройств, способу передачи механической энергии исполнительным органами ряду других признаков. По виду движения различаются электроприводы вращательного и поступательного однонаправленного и реверсивного движения, а также электроприводы возвратно-поступательного движения. Эти движения могут иметь как непрерывный, так и дискретный характер. По принципам регулирования скорости и положения электропривод может быть: ü нерегулируемый (исполнительный орган приводится в движение с одной постоянной скоростью); ü регулируемый (путем воздействия на электропривод скорость движения исполнительного органа изменяется в соответствии с требованиями технологического процесса); ü следящий (с помощью электропривода воспроизводится перемещение исполнительного органа в соответствии с произвольно изменяющимся задающим сигналом); ü программно-управляемый (электропривод обеспечивает перемещение исполнительного органа в соответствии с заданной программой); ü адаптивный (электропривод автоматически обеспечивает оптимальный режим движения исполнительного органа при изменении условий его работы);
ü позиционный (электропривод обеспечивает регулирование положения исполнительного органа рабочей машины). По роду механического передаточного устройства различают редукторный электропривод, содержащий один из видов механического передаточного устройства, и безредукторный, в котором электродвигатель непосредственно соединен с исполнительным органом. По роду электрического преобразовательного устройства различают: ü вентильный электропривод, преобразовательным устройством которого является вентильный преобразователь энергии. Разновидностями вентильного электропривода являются ионный и полупроводниковый электроприводы. Полупроводниковый электропривод, в свою очередь, делится на тиристорный и транзисторный электроприводы, преобразовательным устройством в которых является соответственно тиристорный или транзисторный преобразователь электроэнергии; ü система управляемый выпрямитель - двигатель (УВ - Д) — вентильный электропривод постоянного тока, преобазовательным устройством которого является регулируемый выпрямитель; ü система преобразователь частоты - двигатель (ПЧ - Д) — вентильный электропривод переменного тока, преобразовательным устройством которого является регулируемой преобразователь частоты; ü система генератор - двигатель (Г - Д) и магнитный усилитель - двигатель (МУ - Д) -регулируемый электропривод, преобразовательным устройством которого является соответственно электромашинный преобразовательный агрегат или магнитный усилитель. По способу передачи механической энергии исполнительному органу электроприводы делятся на индивидуальный, взаимосвязанный и групповой. Индивидуальный электропривод характеризуется тем, что каждый исполнительный орган рабочей машины приводится в движение своим отдельным двигателем. Взаимосвязанный электропривод содержит два или несколько электрически или механически связанных между собой электроприводов. Частным случаем взаимосвязанного электропривода является многодвигательный электропривод, при котором несколько двигателей работают на общий вал, приводя в движение один исполнительный орган. Групповой электропривод характеризуется тем, что от одного двигателя приводится в движение несколько исполнительных органов одной или нескольких рабочих машин.
2. Механические характеристики рабочих машин. Механические характеристики электродвигателей. Механической характеристикой рабочей машины называется зависи-мость:М = f (ω), где М - момент сопротивления рабочей машины, Н•м; ω - угловая скорость, рад/с; ω=πn/30; π - частота вращения, об/мин. Большинство механических характеристик машин позволяет описать следующая эм-пирическая формула: М = М0 + (Мс.ном- М0)(ω/ωном)х, где М0 - начальный момент сопротивления при ω = 0; ω - текущее значение угловой ско-рости, соответствующее текущему значению момента М; Мс.ном- статический момент со-противления при ωном.
При х = 0 получается не зависящая от скорости механическая характеристика, для которой М = Мс.ном (прямая 1 на рис. 1). Такая характеристика у подъемных кранов, лебедок. К этой группе могут быть отнесены механизмы, у которых основное со-противление создают силы трения (навозоуборочные транспортеры, кормораздатчики, шнеки, конвейеры, барабаны сушилок, триеры). При х=1 получается линейно возрастающая характеристика (линия 2 на рис.1). Ею обладают многие машины, у которых основные сопротивления со-здаются силами трения совместно с аэродинамическими (молотилки, дробилки кормов, лесопильные рамы, зерноочистительные машины). Иногда такая ха-рактеристика называется генераторной, так как она присуща генераторам постоянного тока независимого возбуждения при постоянной нагрузке.
Если х=2, то момент сопротивления пропорционален квадрату угловой скорости (кривая 3 на рис.1). Такая характеристика называется вентилятор-ной. Так изменяется момент сопротивления вентиляторов, компрессоров, центробежных насосов, сепараторов, пневматических транспортеров и других механизмов, принцип работы которых основан на законах аэро- и гид-родинамики. Если х=-1, то получается нелинейно спадающая характеристика (кривая 4 на рис.1), для которой момент сопротивления изменяется обратно пропорцио-нально скорости, а мощность остается постоянной (такой характеристикой об-ладают металлорежущие станки, у которых с увеличением подачи скорость вращения деталей уменьшается). Если х=2, то момент сопротивления пропорционален квадрату угловой скорости (кривая 3 на рис.1). Такая характеристика называется вентиляторной. Так изменяется момент сопротивления вентиляторов, компрессоров, центробежных насосов, сепараторов, пневматических транспортеров и других механизмов, принцип работы которых основан на законах аэро- и гидродинамики. Если х= -1, то получается нелинейно спадающая характеристика (кривая 4 на рис.1), для которой момент сопротивления изменяется обратно пропорционально скорости, а мощность остается постоянной (такой характеристикой обладают металлорежущие станки, у которых с увеличением подачи скорость вращения деталей уменьшается).
|
|||||||||
|
|
Последнее изменение этой страницы: 2021-03-10; просмотров: 258; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.140.242.165 (0.042 с.) |

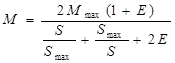 ,
, ,
,  - рассчитываемый и максимальный моменты, Н-м;
- рассчитываемый и максимальный моменты, Н-м;  - коэффициент, Е= f (S);
- коэффициент, Е= f (S);  ,
,  - задаваемое значение скольжения и максимальное (критическое) скольжение (если
- задаваемое значение скольжения и максимальное (критическое) скольжение (если  ,
, - кратность максимального момента электродвигателя;
- кратность максимального момента электродвигателя;  - номинальное скольжение, о.е.
- номинальное скольжение, о.е. ,
, - номинальный момент, Н-м;
- номинальный момент, Н-м;  ,
, - номинальная угловая скорость, рад/с.
- номинальная угловая скорость, рад/с.
 - синхронная частота вращения ротора, мин-1;
- синхронная частота вращения ротора, мин-1;  - синхронная угловая скорость, рад/с;
- синхронная угловая скорость, рад/с;  - частота тока в сети, Гц;
- частота тока в сети, Гц;  - количество пар полюсов.
- количество пар полюсов.
 .
.