Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Оптимизация работы машин по демонтажу и разрушению зданий
Предположим, что на разрушение объекта привлечены r экскаваторов и п машин для перевозки продуктов разрушения. Среднее время погрузки одной машины равно v -1, а среднее время автосамосвала в пути -1. Если в момент прибытия автосамосвала на объект экскаваторы заняты, то машина становится в очередь под погрузку. Пусть х (t) - количество машин, которые находятся на объекте в момент t. Процесс х (t) является случайным в силу того, что время транспортирования имеет случайный характер в силу технических причин и наличия «пробок», как и сам процесс, из-за различной степени армирования разрушаемых конструкций и их габаритов. Сделанные предположения означают, что время нахождения автосамосвала в пути и время погрузки имеют показательное распределение соответственно с параметрами λ и v. Математическая модель позволяет получать явные формулы для различных характеристик и решать частные задачи при организации производства. Пусть Pk (t) обозначает вероятность того, что в момент t на объекте имеется к машин. Тогда для 0 £ к £ п Pk (t + h) = Pk (t) P - за время h ни одна машина не выполнила погрузку; +Pk- 1(t) P - одна машина прибыла и стала в очередь под погрузку; +Pk +l(t) P - одна машина выполнила погрузку +о(h). Это позволяет выявить следующие соотношения: P 0(t + h) = P 0(t)(1 - λnh) + P 1(t) vh + o (h) для 0 < к < r; Pk (t + h) = Pk (t)(1 - λ (n - k) h - vkh) + Pk- 1(t) λ (п - к + 1) h + Pk+ l(t)(k + 1) vh + o (h) для r £ к < n, Pk (t + h) = Pk (t)(1 - λ (n - k) h - rvh) + Pk- 1(t) λ (n - к + 1) h + rvhPk +1(t) + o (h); Pn (t + h) = Pn (t)(1 - rvh) + (п - 1) λPn- 1(t) h + o (h). Отсюда получаем систему дифференциальных уравнений
P ₵ k (t) = (- λ (п - к) + vk) Pk + λ (п - к+ 1) Рк -1 + v (k + 1) Pk +l для 0 < к < r; P ₵ k (t) = - (λ (п - к) + rv) Pk + λ (п - к+ 1) Рк -1 + rvPk +l для r £ к < n; P ₵ n = - rvPn (t) + Чп - λ (п - 1) Рп -1 При стационарном распределении Решение такой системы имеет следующий вид
где
При работе одного экскаватора (r = 1)
В качестве критерия эффективности, по которому можно выбирать оптимальное число машин для данного количества экскаваторов, необходим учет стоимости С 0 - простоя экскаватора и С 1 - стоимость простоя машин. Зная вероятность различных состояний Рк, определяем время простоя экскаваторов
а при r = 1 L = Р 0. Среднее время простоя машин
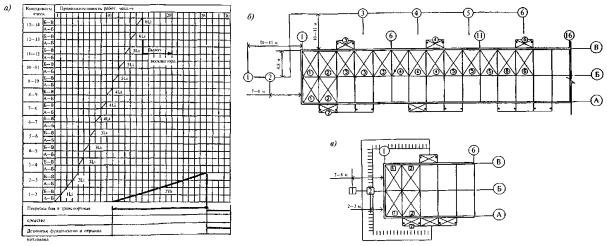
Для одного экскаватора (r = 1) Средние издержки в единицу времени составят W (n) = C 0 L + С 1 М. Вероятность того, что экскаватор простаивает при времени погрузки ρ = 0,2, когда число автосамосвалов п = 4, составляет L = 0,1914, а средний простой автосамосвалов М = 0,5810. Технология разрушения зданий, как правило, предусматривает использование двух экскаваторов, один из которых производит разрушение верхних этажей с размещением боя на нижних этажах и созданием бермы для расположения второго экскаватора, который непосредственно осуществляет цикл погрузки боя и последовательного разрушения нижележащих этажей. Исследование математической модели такой технологии показало, что на различных этажах разборки и перевозки продуктов разрушения среднее время простоя экскаваторов может достигать L = 0,5-0,7 при среднем числе простаивающего автотранспорта М = 0,3-0,35. В зависимости от принятой технологии осуществляется расчет параметров среднего времени простоя машин, оптимизации их потребного количества и минимизации экономических потерь. На рис. 13.9 приведен фрагмент технологической карты на демонтаж крупнопанельного дома при совместной работе двух экскаваторов. Он включает циклограмму работы каждого из экскаваторов и автосамосвалов в соответствии с технологической последовательностью демонтажа ячеек здания, фундаментов и отрывки котлована под новое здание.
Рис. 13. 9. Технология демонтажа крупнопанельного дома при совместной работе двух экскаваторов Для сноса зданий повышенной этажности из кирпича и бетона создан самый большой 100-тонный экскаватор японской фирмы Komatsu. Он оборудован многосекционной стрелой с гидроприводом, что позволяет вести работы на высоте 40 м. Экскаватор оснащен системой оповещения машиниста об опасном наклоне стрелы, с помощью установленной телекамеры он может наблюдать за процессом обрушения. Стрела экскаватора оснащена системой подачи и распыления воды, что снижает запыленность рабочей зоны, повышает обзор и обеспечивает нормальные условия работы.
На рис. 13.10 приведены рабочие моменты разрушения зданий различных конструктивных схем с использованием экскаваторов различных модификаций.
Рис. 13. 10. Рабочие моменты сноса зданий
|
||||||
|
|
Последнее изменение этой страницы: 2020-11-23; просмотров: 108; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.223.21.5 (0.009 с.) |
 и получаем систему уравнений, если положим P ₵ n (t) = 0.
и получаем систему уравнений, если положим P ₵ n (t) = 0.