Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Избыточные связи и лишние степени свободы
Избыточные связи в механизмах - явление нежелательное, т. к. при этом возникает статическая неопределимость системы, а также возрастают требования к точности изготовления деталей, что необходимо для осуществления сборки механизма без деформации звеньев [2, с. 34]. Однако в целом ряде случаев приходится сознательно проектировать и изготавливать механизмы с избыточными связями для обеспечения нужной прочности и жесткости системы. Например, в шарнирном четырехзвеннике изображенном на рисунке 1.6, звено 4, присоединенное к механизму кинематическими парами Е и F, обусловливает избыточную связь. Степень подвижности механизма (см. рис. 1.6, а)
В действительности степень подвижности будет равна (см. рис. 1.6, б)
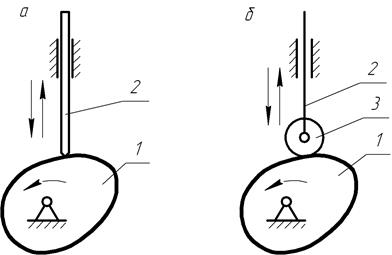
Поэтому, прежде чем определить степень подвижности механизма, следует убрать избыточные связи. Относительное движение звеньев при этом не меняется. Пример механизма, имеющего лишние степени свободы, представлен на рисунке 1.7. Схема а изображает кулачковый механизм, состоящий из кулачка 1 и толкателя 2.
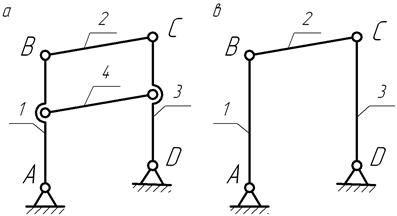
Рис. 1.6. Схема механизма: а — с избыточными связями; в — без избыточных связей
Степень свободы определяется по формуле П.Л.Чебышева: Схема б изображает тот же механизм, но на конце толкателя 2 установлен ролик 3, который не влияет на относительное движение звеньев и служит лишь для уменьшения трения.
Рис. 1.7. Схема механизма: а — без лишних степеней свободы; б — с лишней степенью свободы Степень подвижности такого механизма
Вопросы для самоконтроля: 1. Чем отличается машина от механизма? 2. Назовите основные виды механизмов? 3. Что называется звеном, стойкой, кинематической парой? 4. Сколько классов кинематических пар вы знаете? Как определяется класс кинематической пары? 5. По каким признакам кинематические пары делят на высшие и низшие? Приведите примеры высших и низших пар. 6. Как определяют степень подвижности плоских механизмов (формула П.Л.Чебышева)? Степень подвижности пространственных механизмов (формула А.П.Малышева)? 7. Каким образом возникают лишние степени свободы в механизмах? 8. Как появляются избыточные связи (примеры), как их учитывать при определении степени подвижности механизма?
Цель выполнения структурного анализа: изучение строения механизма, его элементов и структурных составляющих, обеспечивающих его нормальное функционирование и дальнейший анализ. 2.1. Задачи структурного анализа. Принцип Ассура. При структурном анализе необходимо решить следующие задачи: - Определить степень подвижности механизма (число степеней свободы). - Выделить структурные группы (группы Ассура). - Выделить механизм I класса. Число степеней свободы равно числу обобщенных координат, характеризующих положение кинематической цепи относительно стойки. Таково же, как правило, и число входных звеньев. Входное звено, соединенное в кинематическую пару со стойкой, называется механизмом I класса (рис. 2.1). Механизм I класса имеет одну степень свободы (W=1).
Рис 2.1. Механизм I класса.
Если присоединить к входному звену кинематическую цепь, то получится структурная схема механизма. При этом степень подвижности не должна измениться. Принцип образования механизмов, впервые сформулированный Л.В.Ассуром, заключается в следующем. Схема любого механизма может быть составлена последовательным присоединением к начальному звену групп звеньев с нулевой степенью подвижности. Для плоского механизма, состоящего только из кинематических пар 5-го класса (пары 4-го класса можно заменить на низшие), степень подвижности присоединенных групп определяется по формуле Чебышева:
Таким образом, сколько бы групп ни присоединяли к механизму I класса, степень подвижности остается равной 1.
2.2. Группы Ассура, их классификация Группой Ассура называется незамкнутая кинематическая цепь с нулевой степенью подвижности. Поскольку n и а) б) в) Практически в механизмах, используемых в машиностроении, встречаются первые два сочетания (рис. 2.2).
Рис. 2.2. Примеры структурных групп: а - II класса; б - III класса.
Класс группы Ассура определяется наивысшим числом кинематических пар, входящих в замкнутый контур. Порядок структурной группы определяется числом элементов звеньев, которыми она присоединяется к механизму; при этом нельзя присоединять группу к одному звену. Пунктирной линией показаны звенья, к которым группа присоединяется. Этими звеньями являются начальное звено, или звенья других групп, или стойка.
Группа, имеющая два звена и три кинематические пары 5-го класса, называется группой II класса (см.рис.2.2, а). Второе возможное сочетание числа подвижных звеньев и кинематических пар образует группу III класса Класс механизма определяется наивысшим классом структурной группы, входящей в состав данного механизма. Если в состав механизма входят также и высшие пары, то их необходимо заменить на низшие, после чего определить класс и порядок структурных групп. Самая простая структурная группа
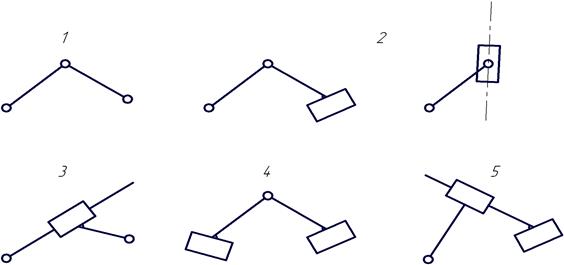
Рис. 2.3. Виды структурных групп II класса: группа 1-го вида - все пары вращательные; группа 2-го вида - на конце одного из звеньев поступательная пара; группа 3-го вида - в середине поступательная пара; группа 4-го вида — на конце обоих звеньев поступательные пары; группа 5-го вида — в середине и на конце одного из звеньев поступательная пара. Структурный анализ механизма следует проводить путем расчленения его на структурные группы в порядке, обратном образованию механизма, т. е. выделять группы начинают с наиболее удаленной (последней в порядке присоединения их к механизму I класса). В результате отсоединения структурных групп остается механизм I класса. Разложение механизма на структурные группы необходимо для решения задач кинематического и силового анализа, т. к. в соответствии с принципом Ассура данный метод обеспечивает статическую определимость схем плоских механизмов [2, с. 36—38]. Пример. Выполнить структурный анализ механизма шарнирного четырехзвенника (рис. 2.4).
Рис. 2.4. Шарнирный четырехзвенник
1. Определим степень подвижности механизма
2. Выделим группы Ассура (последние два звена и три кинематические пары) - группа II класса 1-го вида (II1)
3. Остается механизм I класса
|
||||||||||
|
|
Последнее изменение этой страницы: 2020-12-17; просмотров: 561; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.145.115.195 (0.013 с.) |





 (2.1)
(2.1) могут быть только целыми числами, из равенства (2.1) получаются следующие сочетания:
могут быть только целыми числами, из равенства (2.1) получаются следующие сочетания: ;
; ;
; и т. д.
и т. д.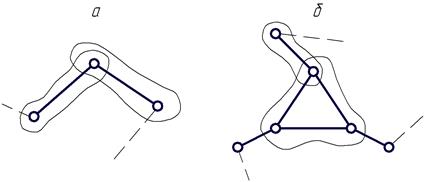
 , состоящая из двух звеньев и трех кинематических пар, имеет 5 видов в зависимости от сочетания вращательных и поступательных пар (рис. 2.3):
, состоящая из двух звеньев и трех кинематических пар, имеет 5 видов в зависимости от сочетания вращательных и поступательных пар (рис. 2.3):