Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Реле тока РТ-40У (на микросхемах).
· Питание от контролируемого тока · Три диапазона измерения тока (0,1-1А, 0,5-5А и 3-30А) · Регулируемый порог срабатывания от 10 до 100% максимального значения тока · Термическая устойчивость в длительном режиме: диапазон - 1А до 4А; диапазон -5А до 15А, диапазон - 30А до 400А · Регулируемая задержка срабатывания исполнительного реле от 0,2с до 20с · Встроенное исполнительное реле 16А 250
Принцип действия электромагнитного реле тока РТ-40.
Рис.10. Конструкция токового электромагнитного реле РТ-40.
1 – гаситель вибрации, 2 – ось, 3 – ось крепления якоря, 4 – якорь, 5 – сердечник с обмотками, 9 – ось крепления пружины, 11 – указатель, 12 – шкала, 13 – пружина возврата, 15 – подвижный контакт, 17 – неподвижные контакты . На якорь 4 реле действует электромагнитная сила Fэм, которая создаёт электромагнитный момент Мэ= F эм×ℓ, действующей на якорь, где ℓ -плечо якоря.
где Iр – ток, протекающий через обмотку реле, Мэ= F эм×ℓ, так как F Э = k ′ I 2 Р, то Мэ= k ′′× I 2 р электромагнитный момент, действующий на якорь зависит от тока реле в квадрате. Если учесть, что т.е. электромагнитный момент также зависит от напряжения сети в квадрате. Это свойство реле позволяет его использовать как реле тока, так и реле напряжения. По конструкции реле напряжения аналогично токовому, подключается к трансформатору напряжения.
Наименьший ток, при котором реле срабатывает, называется током срабатывания и обозначается Ic.p.
На якорь реле действуют моменты: Мэ - электромагнитный момент, Мп - момент противодействующей пружины, Мт - момент трения.
Мэ=Мп+Мт = Мс.р. При протекании нормального рабочего тока в сети электромагнитный момент Мср ≤Мп+Мт, поэтому якорь реле не двигается. При увеличении тока нагрузки в сети до опасного электромагнитный момент Мср >Мп+Мт, т.е. электромагнитный станет больше чем сумма моментов пружины и трения и якорь повернётся и замкнёт неподвижные контакты, реле сработает. Ток срабатывания реле Ic.p. можно настраивать: - натяжением пружины, - изменением числа витков обмотки, - изменением Rм (зазора между якорем и магнитопроводом).
Для возврата якоря реле необходимо, чтобы момент Мп пружины преодолел электромаrнитный момент Мэ.воз и момент трения Мт.
Условия возврата определяются из уравнения равновесия моментов: М п ≥Мэ.воз + Мт
Наибольший ток в реле, при котором якорь реле возвращается в начальное положение называется током возврата реле I воз.
Коэффициент возврата:
, где Квоз – коэффициент возврата реле.
k воз < 1 должен приближаться к единице.
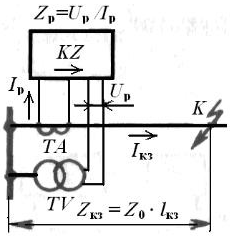
Реле сопротивления. Принцип действия. Реле сопротивления является основным органом дистанционной защиты, оно измеряет сопротивление линии до места КЗ. Реле KZ замеряет напряжение и ток в месте установки защиты и производит вычисление сопротивление линии Zр=Uр/Iр от места установки защиты до точки КЗ.
Рис.10. Схема подключения реле сопротивления.
Принцип действия электромагнитного реле сопротивления. В нормальном режиме Zрн=Uрн/Iрн реле не срабатывает. При возникновении КЗ в месте установки защиты понижается напряжение до Uрк и увеличивается ток реле до Iрк, в итоге сопротивление ZК уменьшается до сопротивления Zркз=Uрк/Iрк и реле ZK срабатывает, так как Zрн>Zркз. Реле настраивают на сопротивление срабатывания Zср<Zркз.
Рис.11. Электромагнитное реле полного сопротивления.
Устройство электромагнитного реле сопротивления. Реле состоит из двух электромагнитов 1 и 2, стального подвижного коромысла 3, закреплённого на оси 6, контактов 4 и противодействующей пружины 5. Обмотка Т питается током от трансформатора тока линии, обмотка Н питается от трансформатора напряжения на шинах подстанции. На коромысло 6 действуют моменты: - от тока в линии на замыкание контактов - от напряжения на размыкание - от противодействующий момент пружины В нормальном режиме моменты При КЗ в линии ток резко повышается, что приводит к увеличению момента Устройство электронного реле сопротивления. На практике чаще применяются электронные схемы реле сопротивления рис.12.
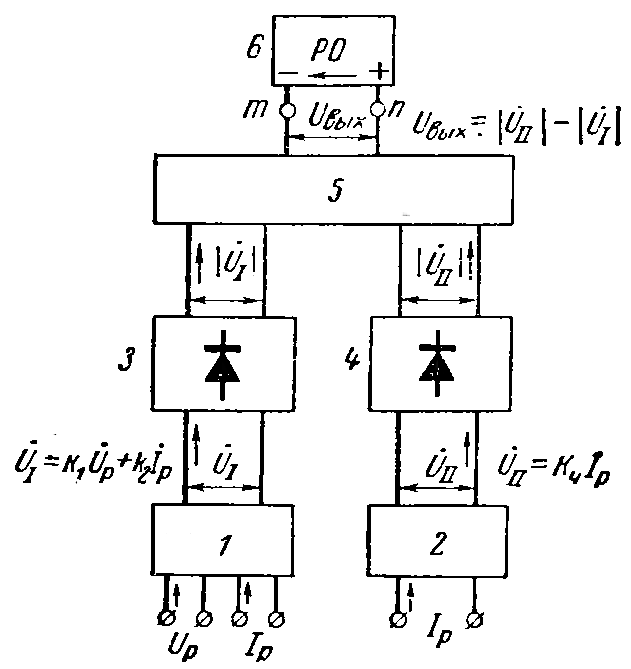
Рис.12. Электронная схема реле сопротивления.
Принцип действия этих реле основан на сравнении абсолютных величин двух UI и UII напряжений.
Где коэффициенты k1 и k4>0
Реле состоит из: - преобразующих устройств 1 и 2, - выпрямителей 3 и 4, - схемы сравнения 5, - реагирующего органа 6 (нуль-индикатора). В качестве органа 6 используется поляризованное реле.
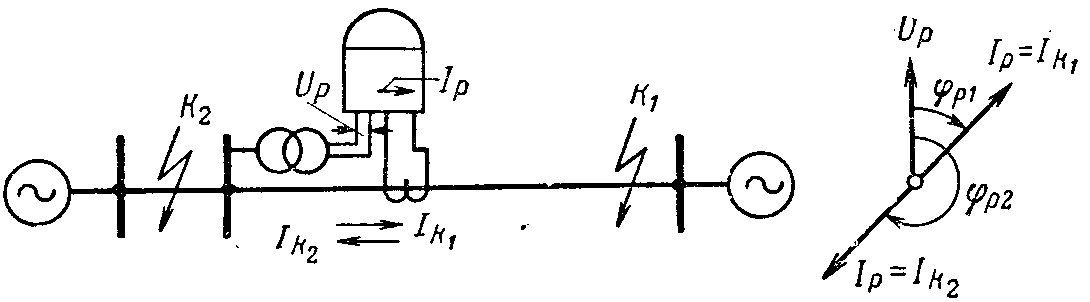
Направленное реле мощности. Реле мощности предназначены для использования в составе схем РЗ в качестве чувствительного органа, реагирующего на знак направления мощности, к месту где возникло КЗ на защищаемом участке сети (см. рис.13). Необходимость в применении направленных защит возникает в сетях с двусторонним питанием, Защита в этих сетях должна не только реаrировать на появление тока КЗ, но для обеспечения селективности должна также учитывать направление мощности КЗ. В защищаемой линии (или, иначе rоворя, фазу тока в линии относительно напряжения на шинах).
Рис.13. Векторная диаграмма реле.
Электротехническая промышленность изготовляет реле направления мощности двух типов: - индукционные с цилиндрическим ротором (РБМ-170, РБМ-270); - микроэлектронные (РМ-1, РМ-12).
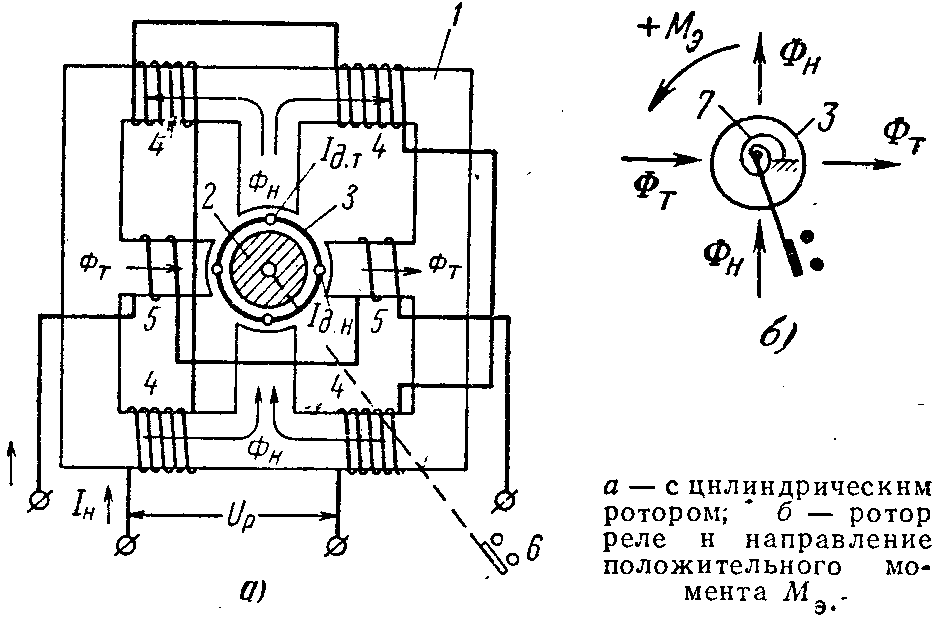
Принцип действия индукционного реле времени. Индукционные реле изготовляют с использованием 2-х обмоток, одна из которых Ip подключается к ТТ, а вторая Uр к зажимам ТН (см. рис. 14). При прохождении во вторичной цепи токов каждый из токов формирует собственные магнитные потоки Фн, Фт. Конструктивно данное реле состоит из магнитопровода (сердечника) с выступающими полюсами. Между полюсами сердечника установлен стальной сердечник, имеющий цилиндрическую форму, и ротор из алюминиевого сплава, который может оборачиваться. На роторе закреплен контактный мостик. При направлении потока мощности КЗ от шин в линию мостик замыкает контакты. Для возврата контактов конструкцией предусмотрена специальная противодействующая пружина.
Рис.14. Индукционные реле мощности с цилиндрическим ротором.
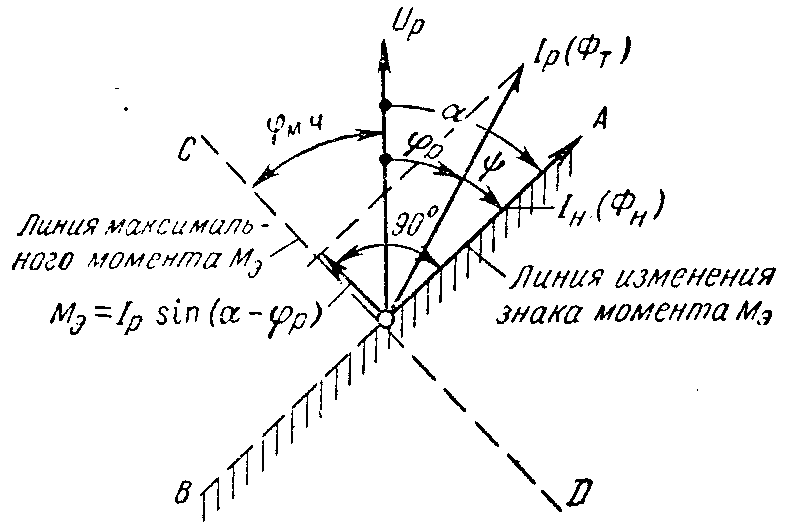
Обмотка 4 питается напряжением Uр=Uс/Kн, а обмотка 5 током Ip == Ic/Kт, rде и Uc и Ic напряжение и ток сети (защищае-- мoro элемента). Ток Iн=Up/Zн В обмотке 4 создает маrнитный по ток Фн. Ток Iр, проходящий по обмотке 5, в свою очередь создает маrнитный поток Фт. На рис. 15 изображена векторная диаrрамма маrнитных потоков Фн и Фт. За исходный для ее построения принимается вектор напряжения Uр. Ток Iн сдвинут по фазе относительно напряжения Uр на уrол α, а ток Ip на уrол φр. Уrол α определяется индуктивным и активным сопротивлением обмотки 4, питаемой напряжением. Уrол φр зависит от внешних параметров сети и схемы присоединения реле. Маrнитные потоки Фн и Фт изображены на диаrрамме совпадаю- щими с создающими их токами Iн и Iр.
Рис.15. Векторная диаграмма реле мощности.
Из векторной диаrраммы следует, что поток Фн и Фт, а также и токи Iн и Iр сдвинуты по фазе на уrол ѱ= α-φр и что уrол ѱ меняется с изменением φр. При взаимодействии магнитные потоки Фн и Фт образуют электромагнитный момент Мэ=k1·Фн·Фт·sin ѱ. Так как Uн≡Фн, Iр≡ Фт, а ѱ= α-φр, то получаем Мэ= k1·Uн·Iр·sin(α-φр)=k1·Sр·sin(α-φр). Выводы. 1. Электромаrнитный момент реле Мэ пропорционален мощности Sp на зажимах реле. 2. Знак электромаrнитноrо момента реле определяется знаком sin(α-φр) и зависит от значения φр. Синус, а следователь-
но, и Мэ положительны, коrда уrол ѱ= α-φр в пределах от 00 до 1800 и отрицательны, если Ф меняется от 180 до 360°, Таким образом реле мощности определяет направление тока в линии. Мощность срабатывания реле. Срабатывание реле происходит при условии, что электромаrнитный момент Мэ преодолеет сопротивление пружины Мп и трения Мт. Наименьшая мощность на зажимах реле, при которой оно срабатывает, называется мощностью срабатывания Sc.p. У современных индукционных реле направления мощности мощность срабатывания при уrле максимальной чувствительности колеблется от 0,2 до 4ВА.
Принцип работы микроэлектронных oснoвaннoro на фазочувствительной схеме (рис. 16).
Рис. 16. Блок-схема микроэлектронного реле направления мощности.
Реле состоит: из суммирующих устройств 1, выпрямителей Вl и В2, схемы сравнения абсолютных значений UI и UII 3 и исполнительнoro opraнa 4. Принцип действия основан на на сравнении величин двух напряжений UI и UII, построенная по блок-схеме (рис. 16). В качестве схемы сравнения принята довольно распространенная схема баланса напряжений, а в качестве нуль-индикатора 4 поляризованное реле. На вход сумматоров подаётся напряжение Uр=Uс/Kн и ток Ip= Ic/Kт, rде и Uc и Ic напряжение и ток сети. На выходе сумматоров получаются напряжения UI=Uр+kIр и UII=Uр-kIр. После выпрямления на схему сравнения 3 подаются напряжения UI и UII. Эти напряжения в контуре схемы сравнения направлены встречно, в результате чеrо Uвых= UI-UII. Реле будет действовать, если UI>UII.
Рис. 17. Векторная диаграмма реле.
Из этих диаrрамм следует, что при КЗ на защищаемой линии (в точке К1) коrда мощность направлена от шин в линию и имеет положительныЙ знак, модуль вектора UI>UII. Поэтому Uвых>0 и реле срабатывает. при КЗ на соседней линии (в точке К2, см. рис.17) мощность направлена к шинам подстанции и имеет отрицательный знак реле не срабатывает.
|
|||||||
|
|
Последнее изменение этой страницы: 2020-12-17; просмотров: 409; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.224.246.203 (0.03 с.) |

 тогда Мэ= k ′′× U 2 р
тогда Мэ= k ′′× U 2 р

 и
и ,
,
 и реле не срабатывет.
и реле не срабатывет. и
и  , при этом контакты реле замыкаются.
, при этом контакты реле замыкаются.