Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Разработка принципиальной схемы управления электроприводами
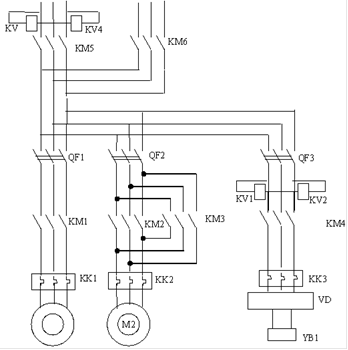
Принципиальная схема управления (рисунок №5) обеспечивает: - дистанционное управление электроприводами; наличие двух режимов работы установки: 1 режим - рабочий режим (режим очистки сыпучей смеси), 2 режим - режим наладки; пуск привода транспортёра М1 в 1 режиме только при нахождении электромагнитной плиты (траверсы) в рабочей позиции и наличии напряжения питания на электромагнитной плите; возможность установки плиты в рабочее положение в случае её нахождения в каком-либо другом пространственном положении в обоих режимах; останов привода транспортёра в 1 режиме по истечении времени ∆t1 (время одного цикла очистки) после дистанционного включения оператором при первом цикле очистки; автоматическое включение и перемещения траверсы в зону сброса металлических деталей по истечении времени ∆t1 по циклу: ход в зону сброса металла, останов в крайней точке зоны сброса в функции пути (контроль по положению) на время ∆t2, возврат в рабочее положение (нахождение над конвейером) с контролем в функции пути (положения); повторное автоматическое включение привода М1 при выполнении условия, изложенного в пункте 3; автоматическое включение напряжения питания плиты при нахождении (достижении) исходного рабочего положения при работе в 1 режиме; автоматическое отключение напряжения питания с электромагнитной плиты при достижении траверсы крайней точки зоны сброса при работе в 1 режиме; возможность независимой работы электроприводов во 2 режиме со снятием действия всех электрических блокировок; звуковая сигнализация минимального значения величины питающего напряжения электромагнитной плиты; световая сигнализация включенного состояния силового электрооборудования; наличие соответствующих электрических защит электроприводов и схемы управления в соответствии с режимами и условиями работы электрооборудования; наличие защит и блокировок, обеспечивающих безопасные условия работы персонала и технологического оборудования; предусмотреть АВР (автоматическое включение резерва) при выходе из строя основного источника питания электромагнитной плиты; световая и звуковая сигнализация включения АВР. Силовая схема
Рисунок 1 - Главные цепи электроприводов
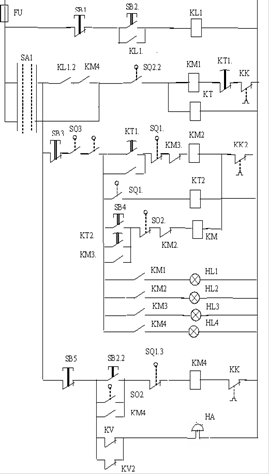
Рисунок 2 - Цепи управления и сигнализации
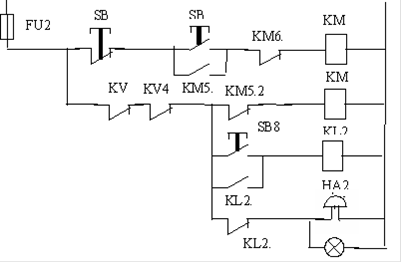
Схема управления
Рисунок 3 - Схема управления АВР
|
|||||||
|
|
Последнее изменение этой страницы: 2020-10-24; просмотров: 127; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.222.148.124 (0.004 с.) |