
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Проекция силы на ось и на плоскостьСтр 1 из 10Следующая ⇒
ОГЛАВЛЕНИЕ Теоретическая механика.............................................................................. 4 I. Статика..................................................................................................... 4 1. Основные понятия и аксиомы статики.............................................. 4 2. Система сходящихся сил................................................................... 6 3. Плоская система произвольно расположенных сил........................ 9 4. Понятие о ферме. Расчет ферм........................................................ 11 5. Пространственная система сил........................................................ 11 II. Кинематика точки и твердого тела...................................................... 13 1. Основные понятия кинематики........................................................ 13 2. Поступательное и вращательное движения твердого тела............ 15 3. Плоскопараллельное движение твердого тела............................... 16 III. Динамика точки................................................................................... 21 1. Основные понятия и определения. Законы динамики.................... 21 2. Общие теоремы динамики точки.................................................... 21 Сопротивление материалов....................................................................... 22 1. Основные понятия............................................................................ 22 2. Внешние и внутренние силы. Метод сечений................................. 22 3. Понятие о напряжении.................................................................... 24 4. Растяжение и сжатие прямого бруса............................................... 25 5. Сдвиг и смятие................................................................................. 27 6. Кручение.......................................................................................... 28 7. Поперечный изгиб........................................................................... 29 8. Продольный изгиб. Сущность явления продольного изгиба. Формула Эйлера. Критическое напряжение...................................................... 32 Теория механизмов и машин..................................................................... 34 1. Структурный анализ механизмов................................................... 34 2. Классификация плоских механизмов.............................................. 36 3. Кинематическое исследование плоских механизмов...................... 37 4. Кулачковые механизмы................................................................... 38 5. Зубчатые механизмы....................................................................... 40 6. Динамика механизмов и машин...................................................... 43 Список литературы..................................................................................... 45 ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
I. Статика Основные понятия и аксиомы статики Наука об общих законах движения и равновесия материальных тел и о возникающих при этом взаимодействиях между телами называется теоретической механикой.
Статикой называется раздел механики, в котором излагается общее учение о силах и изучаются условия равновесия материальных тел, находящихся под действием сил. Абсолютно твердым телом называется такое тело, расстояние между двумя любыми точками которого всегда остается постоянным. Величина, являющаяся количественной мерой механического взаимодействия материальных тел, называется силой. Скалярные величины – это такие, которые полностью характеризуются их численным значением. Векторные величины – это такие, которые помимо численного значения, характеризуются еще и направлением в пространстве. Сила является векторной величиной (рис. 1).
Рис. 1 Сила характеризуется: – направлением; – численной величиной или модулем; – точкой приложения. Прямая D Е, вдоль которой направлена сила, называется линией действия силы. Совокупность сил, действующих на какое-либо твердое тело, называется системой сил. Тело, не скрепленное с другими телами, которому из данного положения можно сообщить любое перемещение в пространстве, называется свободным. Если одну систему сил, действующих на свободное твердое тело, можно заменить другой системой, не изменяя при этом состояния покоя или движения, в котором находится тело, то такие две системы сил называются эквивалентными. Система сил, под действием которой свободное твердое тело может находиться в покое, называется уравновешенной или эквивалентной нулю. Равнодействующая – это сила, которая одна заменяет действие данной системы сил на твердое тело. Сила, равная равнодействующей по модулю, прямо противоположная ей по направлению и действующая вдоль той же прямой, называется уравновешивающей силой. Внешними называются силы, действующие на частицы данного тела со стороны других материальных тел. Внутренними называются силы, с которыми частицы данного тела действуют друг на друга. Сила, приложенная к телу в какой-нибудь одной его точке, называется сосредоточенной.
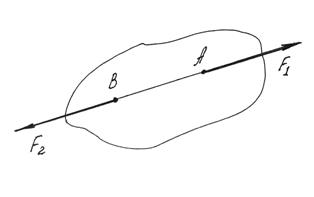
Силы, действующие на все точки данного объема или данной части поверхности тела, называются распределенными. Аксиома 1. Если на свободное абсолютно твердое тело действуют две силы, то тело может находиться в равновесии тогда и только тогда, когда эти силы равны по модулю и направлены вдоль одной прямой в противоположные стороны (рис. 2).
Рис. 2
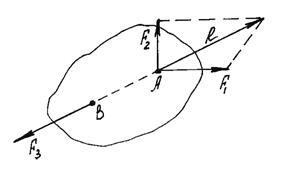
Аксиома 2. Действие одной системы сил на абсолютно твердое тело не изменится, если к ней прибавить или от нее отнять уравновешенную систему сил. Следствие из 1-й и 2-й аксиом. Действие силы на абсолютно твердое тело не изменится, если перенести точку приложения силы вдоль ее линии действия в любую другую точку тела. Аксиома 3 (аксиома параллелограмма сил). Две силы, приложенные к телу в одной точке, имеют равнодействующую, приложенную в той же точке и изображаемую диагональю параллелограмма, построенного на этих силах, как на сторонах (рис. 3).
Рис. 3
R = F 1 + F 2 Вектор R, равный диагонали параллелограмма, построенного на векторах F 1 и F 2, называется геометрической суммой векторов. Аксиома 4. При всяком действии одного материального тела на другое имеет место такое же по величине, но противоположное по направлению противодействие. Аксиома 5 (принцип отвердевания). Равновесие изменяемого (деформируемого) тела, находящегося под действием данной системы сил, не нарушится, если тело считать отвердевшим (абсолютно твердым). Тело, которое не скреплено с другими телами и может совершать из данного положения любые перемещения в пространстве, называется свободным. Тело, перемещениям которого в пространстве препятствуют какие-нибудь другие, скрепленные или соприкасающиеся с ним тела, называется несвободным. Все то, что ограничивает перемещения данного тела в пространстве, называется связью. Сила, с которой данная связь действует на тело, препятствуя тем или иным его перемещениям, называется силой реакции связи или реакцией связи. Реакция связи направлена в сторону, противоположную той, куда связь не дает перемещаться телу. Аксиома связей. Всякое несвободное тело можно рассматривать как свободное, если отбросить связи и заменить их действие реакциями этих связей.
Система сходящихся сил Сходящимися называются силы, линии действия которых пересекаются в одной точке (рис. 4а).
Рис. 4
Система сходящихся сил имеет равнодействующую, равную геометрической сумме (главному вектору) этих сил и приложенную в точке их пересечения. Геометрическая сумма, или главный вектор нескольких сил, изображается замыкающей стороной силового многоугольника, построенного из этих сил (рис. 4б).
Теорема о трех силах Если свободное твердое тело находится в равновесии под действием трех непараллельных сил, лежащих в одной плоскости, то линии действия этих сил пересекаются в одной точке (рис. 8).
Рис. 8 Основные понятия кинематики 1.1. Способы задания движения точки Кинематикой называется раздел механики, в котором изучаются геометрические свойства движения тел без учета их инертности (массы) и действующих на них сил. Кинематически задать движение или закон движения тела (точки) значит задать положение этого тела (точки) относительно данной системы отсчета в любой момент времени.
Системой отсчета называется реальное или условное твердое тело, по отношению к которому определяется положение других движимых тел. Естественный способ задания движения. Непрерывная линия, которую описывает движущаяся точка относительно данной системы отсчета, называется траекторией точки. Если траекторией является прямая линия, движение точки называется прямолинейным, а если кривая – криволинейным. Закон движения точки вдоль траектории выражается уравнением S = f (t). Чтобы задать движение точки естественным способом,надо знать: 1) траекторию точки; 2) начало отсчета на траектории с указанием положительного и отрицательного направлений отсчета; 3) закон движения точки вдоль траектории в виде S = f (t). Численная величина скорости точки в данный момент времени равна первой производной от расстояния точки по времени:
Численная величина ускорения точки в данный момент времени равна первой производной от скорости:
Координатный способ задания движения Закон движения точки при координатном способе выражается уравнениями: x = f 1(t); y = f 2(t); z = f 3(t). Проекции скорости на оси координат равны первым производным от соответствующих координат точки по времени:
Проекции ускорения на оси координат равны первым производным от проекций скоростей или вторым производным от соответствующих координат точки по времени.
III. Динамика точки 1. Основные понятия и определения. Законы динамики Динамикой называется раздел механики, в котором изучаются законы движения материальных тел под действием сил. Инертность представляет собой свойствоматериальных тел быстрее или медленнее изменять скорость своего движения под действием приложенных сил. Величина, зависящая от количества вещества данного тела и определяющая меру его инертности, называется массой тела. Материальной точкой называется материальное тело (тело, имеющее массу), размерами которого при изучении его движения можно пренебречь. Первый закон (закон инерции). Изолированная от внешних воздействий материальная точка сохраняет свое состояние покоя или равномерного прямолинейного движения до тех пор, пока приложенные силы не заставят ее изменить это состояние. Система отсчета, по отношению к которой выполняется закон инерции, называется инерциональной системой отсчета (иногда условно ее называют неподвижной). Второй закон (основной закон динамики). Произведение массы точки на ускорение, которое она получает под действием данной силы, равно по модулю этой силе, а направление ускорения совпадает с направлением силы.
Этот закон выражается равенством F = ma. Третий закон (закон равенства действия и противодействия). Две материальные точки действуют друг на друга с силами, равными по модулю и направленными вдоль прямой, соединяющей эти точки, в противоположные стороны.
СОПРОТИВЛЕНИЕ МАТЕРИАЛОВ Основные понятия Наука, изучающая деформацию тел, называется сопротивлением материалов. Деформацией называется изменение формы и размеров тел. Упругость – свойство тел восстанавливать свою первоначальную форму после прекращения действия нагрузки. Деформации, которые не исчезают после прекращения действия нагрузки, называются остаточными или пластичными. Способность тела приобретать пластическую деформацию называется пластичностью. Прочность – способность конструкции выдерживать заданную нагрузку без разрушения. Жесткость – способность конструкции под действием заданной нагрузки сохранять свои размеры и формы в установленных пределах. Устойчивость – способность конструкции сопротивляться усилиям, стремящимся вывести ее из исходного состояния равновесия. Брус – тело, поперечные размеры которого малы по сравнению с его длиной. Сплошность материала – материал тела имеет сплошное строение, т. е. заполняет объем, ограниченный поверхностью тела, без пустот. Однородность материала – во всех точках тела материал обладает одинаковыми свойствами. Изотропия – материалы обладают одинаковыми свойствами во всех направлениях.
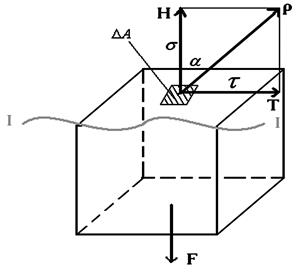
Понятие о напряжении
Рис. 26
А – площадь поперечного сечения. D A – элементарная площадка. D R – элементарная внутренняя сила на этой площадке.
Напряжение – внутренняя сила, приходящаяся на единицу площадки, размерность Н/м2 (Н/мм2). Разложим полное напряжение на две взаимно-перпендикулярные составляющие (рис. 26). σ (сигма) ^ площадке – нормальное напряжение. τ (тау) – касательное напряжение. Напряжение σ стремится удалить или сблизить материальные частицы друг относительно друга и называется нормальным напряжением. Напряжение τ стремится сдвинуть материальные частицы друг относительно друга и называется касательным или тангенциальным напряжением и направлено перпендикулярно σ и τ: Н/м2 (Н/мм2).
Полное напряжение определяется Напряжение в поперечном сечении бруса – это внутренняя сила, приходящаяся на единицу площади
Расчеты прочности Расчетное напряжение при растяжении или сжатии не должно превышать допускаемого Различают три типа расчетов: проверочный, проектный, определение допускаемой нагрузки. 1. Проверочный расчет – определение рабочего напряжения и сравнение с допускаемым 2. Проектный расчет – определение размеров поперечного сечения
3. Определение допускаемой нагрузки
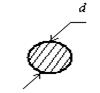
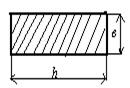
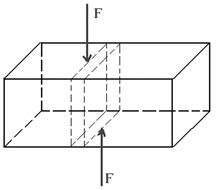
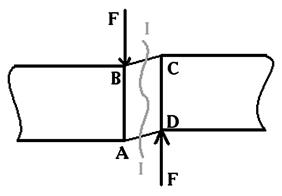
5. Сдвиг и смятие Сдвиг – это такой вид деформации, когда в поперечном сечении возникает один внутренний силовой фактор – поперечная сила. Деформация, при которой происходит искажение прямых углов элементарного параллелепипеда, называется деформацией сдвига (рис. 29, 30).
Рис. 29 Рис. 30
Рис. 31
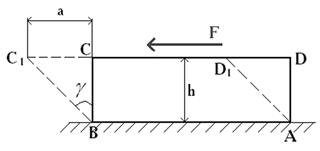
Сдвиг характеризуется двумя параметрами: 1) а – линейное смещение одного сечения относительно другого называется абсолютным сдвигом; 2) угол γ, на который изменяется прямой угол элементарного параллелепипеда называется относительным сдвигом: γ = Сдвиг вызывает касательные напряжения Величина сдвига в пределах упругих деформаций пропорциональна сдвигающей силе Q, расстоянию h, на котором происходит сдвиг, и обратно пропорциональна площади сечения А. Закон Гука (1-я форма) для сдвига – касательное напряжение прямо пропорционально относительному сдвигу Коэффициент G называется модулем сдвига или модулем упругости II рода. Закон Гука (2-я форма) для сдвига – абсолютный сдвиг прямо пропорционален внутренней силе, ширине элемента и обратно пропорционален жесткости при сдвиге.
Расчетное уравнение при сдвиге: Смятие – проникновение более твердого тела в менее твердое. Расчетное уравнение при смятии: Различают три типа расчетов: – проверочный – проверка прочности соединения: – проектный – определение прочностных размеров сечения; – определение величины допускаемой нагрузки.
Кручение Крутящим моментом в поперечном сечении бруса называется результирующий момент внутренних касательных сил, равный сумме моментов внешних сил, действующих на рассматриваемую часть бруса. Крутящий момент считается положительным, если наблюдатель со стороны отброшенной части видит вращение вала против хода часовой стрелки, отрицательным – по ходу часовой стрелки. Закон Гука при кручении – касательное напряжение в произвольном волокне вала прямо пропорционально расстоянию этого волокна до оси.
Результирующий крутящий момент в сечении: J р – полярный момент инерции площади сечения. Полярным моментом инерции площади сечения называется сумма произведений элементарных площадок на квадрат их расстояния до оси, перпендикулярной плоскости сечения. Касательное напряжение в произвольном волокне вала при кручении:
Полярным моментом сопротивления площади сечения называется отношение полярного момента инерции к расстоянию наиболее удаленного волокна до оси.
Расчет вала на прочность – определение его диаметра из условия, что максимальное касательное напряжение не превышает допускаемое.
Расчет вала на жесткость –определение его диаметра из условия, что угол закручивания вала не превышает допускаемого угла закручивания:
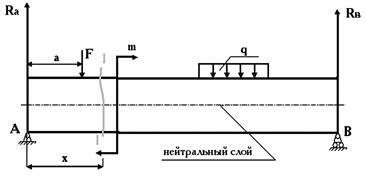
Поперечный изгиб Поперечный изгиб – это такой вид деформации, когда силы, действующие на брус, лежат в плоскости симметрии поперечного сечения и перпендикулярны оси бруса (сосредоточенные силы, равномерно распространенная нагрузка, сосредоточенный момент).
Рис. 32 Проведем в балке сечение I–I, отбросим правую часть и заменим ее действие на левую внутренними силами Q и М (рис. 32).
Рис. 33
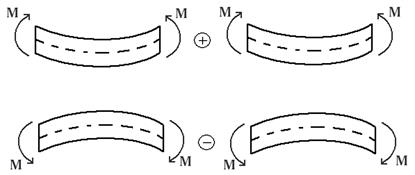
Результирующий момент внутренних растягивающих и сжимающих сил в поперечном сечении балки называется изгибающим моментом в данном сечении М. Q – результирующая внутренних касательных сил в поперечном сечении балки называется поперечной силой в данном сечении. Итак, в поперечном сечении балки при изгибе возникает два внутренних силовых фактора: поперечная сила и изгибающий момент. Изгибающий момент в поперечном сечении балки равен алгебраической сумме моментов внешних сил, взятых относительно рассматриваемого сечения балки. При определении знака изгибающего момента используется следующее правило. Изгибающий момент положителен, если под действием внешней силы балка изгибается выпуклостью вниз (полная чаша); отрицателен, если выпуклостью вверх (опрокинутая чаша) (рис. 34, 35).
Рис. 34
Рис. 35
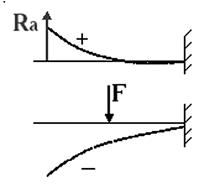
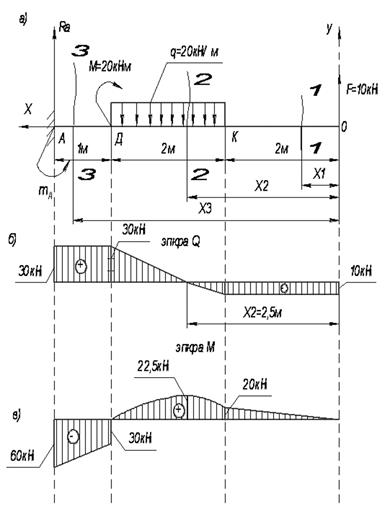
7.1. Контроль правильности построения эпюр (рис. 36) 1. Участок балки, на котором нет равномерно распределенной нагрузки (q = 0), – эпюра поперечных сил представляет собой прямую, параллельную оси абсцисс. Эпюра изгибающих моментов представляет собой наклонную прямую линию. 2. Участок балки, где q = const, эпюра поперечной силы есть наклонная прямая линия; эпюра изгибающего момента – парабола. 3. Участок балки, где действует равномерно распределенная нагрузка; эпюра поперечной силы обращается в ноль, а эпюра изгибающего момента имеет экстремальное значение. 4. В шарнирах двухопорной балки эпюры поперечных сил в этих точках равны опорным реакциям, а эпюры изгибающих моментов, если не приложен сосредоточенный момент, равны нулю. 5. Если приложена сосредоточенная сила, то на эпюре «Q» происходит скачок на величину этой силы, а на эпюре «М» – излом. 6. Если в точке приложен сосредоточенный момент – пара сил, то на эпюре изгибающего момента происходит скачок на величину этого момента, на эпюре поперечных сил это не отражается.
Рис. 36
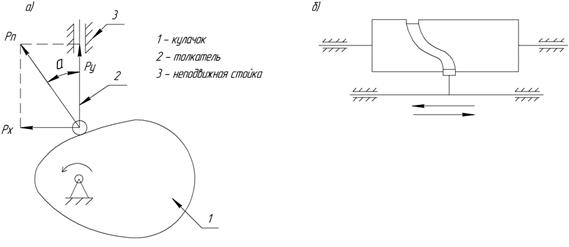
Продольный изгиб ТЕОРИЯ МЕХАНИЗМОВ И МАШИН Кулачковые механизмы Кулачковым механизмом называется механизм, в состав которго входит кулачок (звено, рабочая поверхность которого имеет переменную кривизну) (рис. 42).
Рис. 42
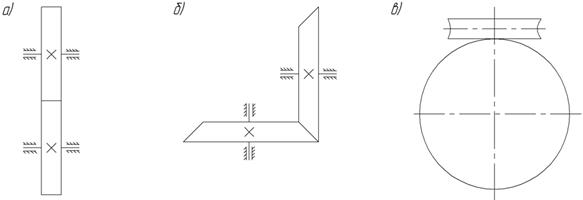
Классификация кулачковых механизмов 1. В зависимости от вида относительного движения звеньев: а) плоские (кулачок и толкатель перемещаются в параллельных плоскостях) (рис. 42а); б) пространственные (кулачок и толкатель перемещаются в непараллельных плоскостях) (рис. 42б). 2. По видам движения кулачка: а) с поступательно движущимися кулачками (рис. 43а); б) с вращающимися кулачками (рис. 42а); в) с качающимися кулачками (рис. 43б).
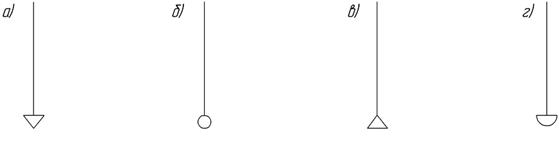
Рис. 43 3. В зависимости от характера движения толкателя: а) возвратно-поступательные; б) колебательные; в) сложные. 4. По профилю рабочей поверхности толкателя: а) остроконечный (рис. 44а); б) роликовый (рис. 44б); в) плоский (рис. 44в); г) сферический (рис. 44г).
Рис. 44
5. В зависимости от типа кулачка: а) дисковые (рис. 42а); б) пазовые (рис. 42б). 6. В зависимости от расположения оси толкателя и центра вращения кулачка: а) центральные (рис. 42а); б) дезаксиальные (рис. 43б). Углом давления α (рис. 42а) называется угол между направлением силы и направлением перемещения, вызванного этой силой. Составляющая сила Ру является движущей силой для толкателя и определяется по формуле Ру = Р n cosα. Составляющая сила Рх прижимает толкатель к направляющей и определяется по формуле Рх = Р n sinα.
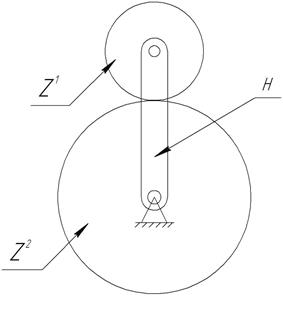
Зубчатые механизмы Зубчатая передача представляет собой передаточный механизм, звеньями которого являются зубчатые колеса, служащие для передачи движения и сил путем непосредственного зацепления. Зубчатой передачей называется трехзвенный механизм, имеющий две низшие и одну высшую кинематические пары. Зубчатым колесом называется звено с замкнутой системой зубьев, обеспечивающее за свой полный оборот непрерывность движения парного звена в одном направлении. Зубчатые механизмы, в составе которых имеются подвижные оси зубчатых колес, называются эпициклическими. Зубчатое колесо z 2 (рис. 45), ось которого перемещается в пространстве, называется сателлитом. Зубчатое колесо z 1 (рис. 45), вокруг оси которого вращается сателлит, называется солнечным или центральным. Звено Н (рис. 45), которое несет на себе ось сателлита, называется водилом.
Рис. 45
Планетарным называется эпициклический механизм, имеющий степень подвижности, равную единице. Дифференциальным называется эпициклический механизм, имеющий степень подвижности больше единицы. Цилиндрические зубчатые передачи – это передачи с параллельными осями колес (рис. 46а). Конические зубчатые передачи – это передачи с пересекающимися осями колес (рис. 46б). Гиперболоидные зубчатые передачи – это передачи с перекрещивающимися осями колес (рис. 46в).
Рис. 46
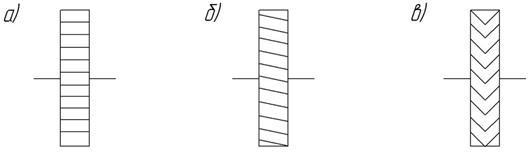
Прямозубыми называются колеса, у которых направление каждого зуба совпадает с образующей начальной поверхности (рис. 47а). Косозубыми называются колеса, у которых направление каждого зуба составляет постоянный угол с образующей начальной поверхности (рис. 47б). Шевронными называются колеса, у которых зубчатый венец образуется из двух рядов косых зубьев противоположного направления (рис. 47в).
Рис. 47
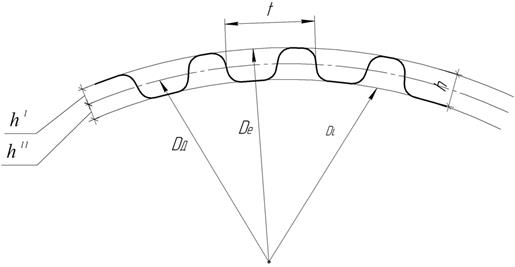
Элементы зубчатого колеса
Рис. 48
Шагом зацепления называется расстояние t (рис. 48) между одинаково расположенными точками двух соседних зубьев, измеренное по делительной окружности. Линия пересечения боковой поверхности зуба с плоскостью, перпендикулярной к оси вращения колеса, называется профилем зуба. Окружность наибольшего диаметра (проходящая через вершины зубьев) называется окружностью вершин (D е). Окружность, ограничивающая тело зубчатого колеса от стороны его зубьев, называется окружностью впадин (Di). Делительной окружностью называется окружность, которая делит зуб на две части (D д). Часть зуба, заключенная между делительной окружностью и окружностью впадин, называется ножкой зуба (h II). Часть зуба, заключенная между делительной окружностью и окружностью выступов, называется головкой зуба (h I). Расстояние h между окружностью вершин и окружностью впадин называется высотой зуба. Модулем зубчатого зацепления называется часть диаметра делительной окружности, приходящаяся на один зуб (m). Размеры зубчатого колеса, выраженные через модуль 1. Высота головки зуба h I = m 2. Высота ножки зуба h II = 1,25 m 3. Высота зуба h = 2,25 m 4. Шаг зацепления t = π m 5. Диаметр делительной окружности D д = mz 6. Диаметр окружности вершин зубьев D е = m (z + 2) 7. Диаметр окружности впадин Di = m (z – 2,5) Передаточным отношением называется отношение угловой скорости ведущего звена к угловой скорости ведомого звена (i). i
Динамика механизмов и машин Силы инерции Движущие силы – это силы, приложенные к ведущему звену механизма и совершающие механическую работу. Силы полезного сопротивления Q – это силы сопротивления, совершающие работу, требуемую от механизма. Силы вредного сопротивления F – это силы, приложенные к звеньям механизма и совершающие отрицательную работу (не являющуюся работой полезных сопротивлений, которая также отрицательна). Силы вредных сопротивлений делятся на силы трения и силы сопротивления среды. Силы тяжести С – вес самой машины и вес ее звеньев. Силы инерции Р и – силы обратного воздействия ускоряемого тела на тела, вызывающие его ускорение Р и = – m а, где m – масса тела; а – ускорение центра тяжести. Реактивные силы R (или просто реакции) – силы, возникающие в кинематических парах и представляющие собой давление звеньев друг на друга. Силовой анализ Определение реактивных и движущих сил носит название силового анализа механизма. Приведенной силой Р пр называется сила, условно приложенная к одной из точек механизма, работа которой на ее элементарном перемещении равна сумме работ всех реальных сил на их элементарных перемещениях. Уравновешивающей силой Р ур называется сила, равная приведенной, но противоположно направленная. Регулирование хода машины Периодические колебания возникают в механизмах и машинах, в которых силы, действующие на звенья, изменяются в определенной зависимости от угла поворота ведущего звена. К таким машинам относятся двигатели внутреннего сгорания, паровые машины, поршневые насосы и др. Периодические колебания регулируются при помощи маховика. Непериодические колебания возникают в результате случайного изменения сил полезных сопротивлений. Такие колебания регулируются центробежными регуляторами. Уравновешивание сил инерции Неуравновешенность центробежных сил инерции, возникающая оттого, что центр тяжести вращающихся масс не лежит на оси вращения, называется статической. Неуравновешенность центробежных сил инерции, возникающая оттого, что вращающиеся массы распределены неравномерно вдоль оси вращения (хотя центр тяжести всех масс может и лежать на оси), называется динамической. Ротором называется тело, вращающееся вокруг неподвижной оси и опирающееся на две неподвижные опоры. Полное уравновешивание плоского механизма производится с помощью противовесов, подобранных и установленных так, чтобы сумма сил инерции всех звеньев (включая и силы инерции противовесов) и сумма моментов этих сил относительно любой точки равнялись бы нулю. Частичное уравновешивание, при котором сумма всех сил инерции равна нулю, а сумма моментов сил инерции не равна нулю. Такое частичное уравновешивание называется статическим. Если привести силы инерции всех звеньев к центру тяжести механизма, то приведенная сила инерции m – масса всех подвижных звеньев;
Центром тяжести механизма называется общий центр тяжести всех его подвижных звеньев без стойки. СПИСОК ЛИТЕРАТУРЫ Основная 1. Артоболевский И. И. Сборник задач по теории механизмов и машин / И. И. Артоболевский, В. В. Эдельштейн. – М.: Наука, 1973 и все последующие издания. 2. Будник Ф. Г. Сборник задач по теоретической механике: учеб. пособие для студентов втузов / Ф. Г. Будник, Ю. М. Зингерман, Е. И. Селенский; под ред. А. С. Кельзона. – М.: Высш. шк., 1987. – 176 с. 3. Ицкович Г. М. Руководство к решению задач по сопротивлению материалов: учеб. пособие для высших технических учебных заведений / Г. М. Ицкович, А. И. Винокуров, Л. С. Минин; под общ. ред. Г. М. Ицковича. – М.: Высш. шк., 1970. – 544 с. 4. Ицкович Г. М. Сопротивление материалов / Г. М. Ицкович. – М.: Высш. шк., 1998. – 368 с. 5. Кожевников С. Н. Теория механизмов и машин / С. Н. Кожевников. – М.: Машиностроение, 1969 и все последующие издания. 6. Копнов В. А. Сопротивление материалов: руководство для решения задач и выполнения лабораторных и расчетно-графических работ / В. А. Копнов, С. Н. Кривошапко. – М.: Высш. шк., 2003. – 349 с. 7. Кочетов В. Т. Сопротивление материалов / В. Т. Кочетов, А. Д. Павленко, М. В. Кочетов. – Ростов н/Д: Феникс, 2001. – 366 с. Дополнительная 17. Абрамов Б. М. Типовые задачи по теории механизмов и машин / Б. М. Абрамов. – Харьков: Выща шк., 1976. – 208 с. 18. Артоболевский И. И. Теория механизмов и машин / И. И. Артоболевский. – М.: Наука, 1975 и все последующие издания. 19. Аркуша А. И. Руководство к решению задач по теоретической механике / А. И. Аркуша. – М.: Высш. шк., 1971. – 296 с. 20. Бать М. И. Теоретическая механика в примерах и задачах / М. И. Бать, Г. Ю. Джанелидзе, А. С. Кельзон. – М.: Наука, 1972. 21. Бородин Н. А. Сопротивление материалов: учеб. пособие для студентов образоват. учреждений сред. проф. образования, обучающихся по спец. технического профиля / Н. А. Бородин. – 2-е изд., испр. – М.: Дрофа, 2001. – 285 с. – (Среднее профессиональное образование). 22. Грифцов Н. П. Кинематика точки и твердого тела: учеб. пособие / Н. П. Грифцов. – Ульяновск, 1977. 23. Дарков А. В.Сопротивление материалов: учеб. для технических вузов / А. В. Дарков, Г. С. Шпиро. – 5-е изд., перераб. и доп. – М.: Высш. шк., 1989. – 622 с. 24. Кинасошвили Р. С. Сопротивление материалов: краткий учеб. / Р. С. Кинасошвили; под ред. А. С. Вольмира. – 10-е изд. – М.: Наука. Гл. ред. физ.-мат. лит., 1968. – 384 с. 25. Колчин Н. М. Теория механизмов и машин / Н. М. Колчин. – Л.: Судостроение, 1965. 26. Мисюрев М. А. Методика решения задач по теоретической механике / М. А. Мисюерв. – М.: Высш. шк., 1962. – 307 с. 27. Осадчий В. А. Руководство к решению задач по теоретической механике / В. А. Осадчий, A. M. Файн. – М.: Высш. шк., 1972. – 256 с. 28. Партенский В. М. Рычажные механизмы. Кинематические исследования и синтез / В. М. Партенский. – М.: Машиностроение, 1964. – 180 с. ОГЛАВЛЕНИЕ Теоретическая механика.............................................................................. 4 I. Статика..................................................................................................... 4 1. Основные понятия и аксиомы статики.............................................. 4 2. Система сходящихся сил................................................................... 6 3. Плоская система произвольно расположенных сил........................ 9 4. Понятие о ферме. Расчет ферм........................................................ 11 5. Пространственная система сил........................................................ 11 II. Кинематика точки и твердого тела...................................................... 13 1. Основные понятия кинематики........................................................ 13 2. Поступательное и вращательное движения твердого тела............ 15 3. Плоскопараллельное движение твердого тела............................... 16 III. Динамика точки................................................................................... 21 1. Основные понятия и определения. Законы динамики.................... 21
|
|||||||||
|
|
Последнее изменение этой страницы: 2020-11-11; просмотров: 75; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.22.68.49 (0.264 с.) |







 ;
;

 ;
;
 – среднее напряжение на площадке
– среднее напряжение на площадке 
 – полное напряжение в точке.
– полное напряжение в точке.

 .
.



 A = a 2
A = a 2 


 A = 2 b 2 b =
A = 2 b 2 b = 

 .
.
 .
.


 GA – жесткость при сдвиге.
GA – жесткость при сдвиге.










 , где
, где – ускорение центра тяжести механизма.
– ускорение центра тяжести механизма.


