
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Расчет параметров системы подчиненного регулирования
2.1
Рисунок 2.1 — структурная схема регулятора тока
Передаточная функция регулятора тока при оптимизации контура на модульный оптимум будет иметь вид:
Коэффициент передачи регулятора тока:
где ТОТ = 2Тm = 0.01 с
RЭ – суммарное активное сопротивление якорной цепи:
RШ – сопротивление шунта:
LЭ – суммарная индуктивность якорной цепи:
ТЭ – электромагнитная постоянная времени якорной цепи:
Коэффициент передачи тиристорного преобразователя:
Коэффициент обратной связи по току:
где На рисунке 2.2 представлена функциональная схема регулятора тока. Рисунок 2.2 — функциональная схема регулятора тока
На рисунке 2.3 представлена структурная схема регулятора тока.
Рассчитываем элементы функциональной схемы регулятора тока по следующим соотношениям:
В качестве шунта RS выбираем шунт типа 75ШС, имеющий следующие параметры:
UН = 75 мВ, IH = 500 A
Коэффициент передачи датчика тока:
В качестве датчика тока применяем датчик тока типа ДТ3–AИ унифицированной блочной системы регуляторов (УБСР АИ). Этот датчик предназначен для формирования и ввода в систему регулирования аналогового сигнала, пропорционального току в цепи якоря двигателя. Датчик подключается к шунту в якорной цепи и обеспечивает гальваническую развязку между входными и выходными цепями с разностью потенциалов между ними до 1000 В. Параметры датчика ДТ3–AИ (на схеме UA): 1) выходное напряжение ±10 В; 2) коэффициент передачи (регулируемый) КДТ = 53¸135; 3) погрешность ≤ 1% 4) полоса пропускания wПР = 1.5 кГц. 5) напряжение питания постоянным током 12.6 В Принимаем конденсатор СОСТ емкостью 1 мкФ.
Выбираем резистор RОСТ марки МЛТ–0.125, сопротивлением 75 кОм. Выбираем резистор RЗТ марки МЛТ–0.125, сопротивлением 43 кОм. Выбираем резистор RТ марки МЛТ–0.125, сопротивлением 43 кОм. Выбираем конденсатор СОCТ марки К50-6, емкостью 1мкФ.
2.2

Согласно заданию, требуется обеспечить статическую ошибку регулирования в пределах 5%. Применение пропорционального регулятора скорости обеспечивает статизм
что находится в пределах 5%, следовательно, возможно применение П-регулятора. Коэффициент передачи регулятора скорости:
где ТКС = 4Тm = 0.02 с КОС - коэффициент обратной связи по скорости:
где
Суммарный момент инерции системы:
ТМ – электромеханическая постоянная времени:
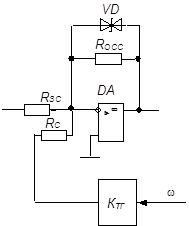
На рисунке 2.5 представлена функциональная схема регулятора скорости.
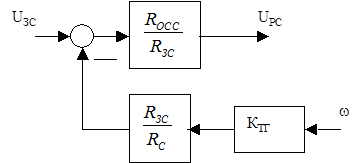
Рисунок 2.5 – Функциональная схема регулятора скорости. На рисунке 2.6 представлена структурная схема регулятора скорости.
В качестве датчика скорости выбираем тахогенератор типа ТД 201. nH = 1000 об/мин; UH = 110 B; КТГ = 1.05 В×с. Рассчитываем элементы функциональной схемы регулятора скорости по следующим соотношениям:
Принимаем резистор RЗС=51 кОм.
Выбираем резистор RЗС марки МЛТ–0.125, сопротивлением 51 кОм. Выбираем резистор RООС марки МЛТ–0.125, сопротивлением 1.1 МОм. Выбираем резистор RС марки МЛТ–0.125, сопротивлением 300 кОм. Выбираем стабилитрон VD типа КС210Б: напряжение стабилизации — 10 В; разброс напряжения стабилизации — ±0.7 В. 2.3
Передаточная функция регулятора будет иметь вид: Рисунок 2.7 — структурная схема регулятора положения
Коэффициент передачи регулятора положения:
Коэффициент обратной связи: где SКР = 400мм – максимально возможное перемещение. На рисунке 2.8 представлена функциональная схема регулятора положения.
Выбираем резистор RЗП марки МЛТ–0.125, сопротивлением 51 кОм. Выбираем резистор RОСП марки МЛТ–0.125, сопротивлением 100 кОм. Выбираем резистор RП марки МЛТ–0.125, сопротивлением 3.9 МОм.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2020-03-14; просмотров: 183; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.144.108.203 (0.037 с.) |







 Расчет регулятора тока
Расчет регулятора тока




























 Рисунок 2.4 — структурная схема регулятора скорости
Рисунок 2.4 — структурная схема регулятора скорости ,
,

















 Расчет регулятора положения
Расчет регулятора положения



 Принимаем резистор RЗП сопротивлением 51 кОм.
Принимаем резистор RЗП сопротивлением 51 кОм.




