Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Навигационно-посадочное оборудование.Стр 1 из 14Следующая ⇒
Навигационно-посадочное оборудование. VHF omnidirectional range (VOR). Instrument Landing System (ILS). Marker Beacon System. Цель лекции: Изучение навигационно-посадочного оборудования. Вопросы лекции: 12.1. Особенности радиосистем ближней навигации и посадки; 12.2. Канал дальности РСБН; 12.3. Канал азимута РСБН; 12.4. Принцип работы аппаратуры "VOR"; 12.5. Принцип действия канала азимута с фазовым методом измерения; 12.6.Принцип действия фазового канала азимута с доплеровским АРМ; 12.7. VHF omnidirectional range (VOR); 12.8. Радиосистемы посадки; 12.9. Instrument Landing System (ILS); 12.10. Маркерный канал; 12.11. Marker Beacon System; 12.12. Навигационно-посадочная аппаратура "КУРС МП-70"; 12.13. VHF omnidirectional range (VOR) В737; 12.14. Instrument Landing System (ILS) В737; 12.15. Marker Beacon System В737. Канал дальности РСБН Принцип действия канала дальности РСБН. Канал дальности (рис. 12.2) состоит из установленного на ЛА запросчика и наземного ответчика – дальномерного радиомаяка ДРМ. Генератор запросных импульсов ГЗИ вырабатывает сигнал запроса дальности ЗД (два импульса с определенным кодовым интервалом между ними). Сигнал ЗД излучается на частоте
Рис. 12.2. Структурная схема канала дальности РСБН (а), а также излучаемые и принимаемые сигналы (б)
Различия кодовых интервалов и несущих частот сигналов ЗД и ОД позволяют повысить помехоустойчивость запросчиков к сигналам запросов других ЛА и предотвратить запуск ДРМ собственными сигналами, отраженными от окружающих его объектов. Для исключения синхронных помех, которые возникают при повторном запуске ответчика сигналом запроса, отраженным от близких к ДРМ объектов, ответчик запирается на некоторое защитное время
Канал азимута РСБН Для определения азимута в РСБН используют либо импульсный, либо фазовый метод. Первый отличается большой точностью, и на его основе строятся отечественные РСБН. Фазовый метод более прост в реализации и применяется в зарубежных системах ближней навигации. Принцип действия канала азимута, реализующего импульсный метод. Азимутальный радиомаяк АРМ формирует две ДНА в горизонтальной плоскости (рис. 12.3). Диаграмма ДН1 состоит из двух узких (около 4°) лепестков и вращается с частотой
Рис. 12.3. Диаграммы направленности антенн АРМ (а) и сигналы канала азимута, реализующего импульсный метод (б, в)
Когда ДН1 проходит через точку приема, на выходе приемника образуется азимутальный сигнал АС, форма которого повторяет форму ДН1. Интервал времени
Для повышения точности отсчет времени
Цифровой измеритель азимута РСБН. Для измерения
Рис. 12.4 Структурная схема цифрового измерителя азимута РСБН
Точность импульсного канала азимута. Главный источник погрешностей здесь – сигналы, отраженные от различных объектов (например, от объекта О на рис. 12.5,а). Искажения результатов измерений вызывают те отраженные сигналы, которые создают мешающее напряжение
Рис. 12.5. Положение ЛА и отражателя в пределах диаграммы направленности АРМ (а) и результат интерференции азимутального и отраженного сигналов (б)
Погрешность измерения азимута при частоте вращения ДН1, равной
где Как следует из (12.2), для повышения точности следует уменьшать скорость вращения ДН1 и увеличивать крутизну фронта импульса 12.4. Принцип работы аппаратуры "VOR". Система ближней навигации ''VOR'' представляет собой радиотехнический комплекс, состоящий из наземного радиомаяка и бортового приемного устройства. Маяк работает на одной из 160 частот диапазона 108,00 - 117,95 МГц. Всенаправленный азимутальный радиомаяк или РМА (VHF Omnidirectional Radio Range, VOR) — вид радионавигационной системы, предназначенной для определения положения воздушного судна. Станция VOR передает в эфир позывные станции (азбукой Морзе) и информацию, которая позволяет радионавигационным системам на борту определить магнитный путевой угол направления станции, то есть угловое положение воздушного судна относительно станции. Данные с двух станций VOR или сочетание информации VOR с данными DME (дальность положения станции) позволяет однозначно определить положение самолета.
Радиосистемы посадки. Принцип действия равносигнальных РСП. Рассмотрим в качестве примера канал глиссады такой системы (рис. 12.8). Глиссадный радиомаяк ГРМ устанавливается рядом с ВПП, напротив точки приземления ЛА. Антенны ГРМ формируют в вертикальной плоскости диаграммы направленности
где Амплитуда напряженности суммарного поля в точке приема
Рис. 12.24. Диаграммы направленности антенн ГРМ и спектры излучаемых сигналов (а), спектры сигналов в точках 1, 2 и 3 (б) и структурная схема бортовой аппаратуры (в)
Коэффициенты при
Информативным параметром принимаемого сигнала является разность глубин модуляции РГМ:
Положение ЛА на линии глиссады соответствует РГМ = 0. При отклонении ЛА вверх от линии глиссады Бортовой приемник ЛА реализует алгоритм (12.11). Для формирования сигналов, пропорциональных Структурная схема канала курса с равносигнальным КРМ показана на рис.12.25.
Рис.12.25. Структурная схема канала курса с равносигнальным радиомаяком; а – структурная схема радиомаяка, диаграммы направленности, формы сигналов в бортовом ПРМ. б – структурная схема бортового изделия.
Антенны КРМ питаются синфазно амплитудно-модулированными колебаниями с частотами модуляции Ω1 и Ω2. Модулирующие колебания вырабатываются генераторами Г1 и Г2, усиливаются усилителями (У1 и У2) и поступают на модуляторы M1 и М2. На модуляторы подаются также высокочастотные колебания от задающего генератора ЗГ, предварительно усиленные усилителем мощности УМ.
Напряженности полей первой и второй антенн равны
где Em1,2 - амплитуды напряженностей полей первой и второй антенн в максимумах диаграммы направленности; f1,2(φ) - нормированные диаграммы направленности в горизонтальной плоскости; m1,2 — коэффициенты модуляции на частотах Ω1 и Ω2.
Результирующее поле представляется как сумма полей несущей частоты и двух полей, соответствующих боковым частотам модуляции. Коэффициенты, определяющие зависимость глубины модуляции результирующего поля от углового параметра, определяем по выражению:
Полученные коэффициенты называются коэффициентами глубины пространственной модуляции. Линии курса соответствует направление φ0, при котором выполняется условие М1(φ0) = М2(φ0) В курсовом приемнике КРП установленном на ВС на выходе детектора выделяют с помощью фильтров Ф1 и Ф2 напряжения uc1 и uc2 амплитуды которых пропорциональны соответственно M1 и М2. Напряжения uc1 и uc2 выпрямляют и сравнивают в схеме сравнения СС. Напряжение, подаваемое на индикаторный прибор, равно разности выпрямленных напряжений, а следовательно, пропорционально разности напряжений uc1 и uc2. Если самолет находится на линии курса, то uc1 = uc2 и стрелка прибора находится в нулевом положении. При оценке изменений сигналов иc1 и иc2 используют специальный параметр - разность глубин модуляции (РГМ). Поскольку uc1 и uc2 пропорциональны M1 и М2, то отклонение стрелки индикатора курса на самолете Δк равно:
где k1 и k2 — коэффициенты пропорциональности. Таким образом, отклонение стрелки индикатора курса пропорционально РГМ. В равносигнальном курсовом радиомаяке выражение для РГМ имеет вид
РГМ= На линии курса
Точность равносигнальных РСП.
При
Переходя к погрешностям измерения РГМ и определения угла
где Из (12.13) следует, что для повышения точности равносигнальной РСП необходимо увеличивать Одним из основных факторов, снижающих точность РСП, является влияние сигналов, отраженных от близких к ВПП объектов. Радиотехнические системы посадки, реализующие равносигнальный метод, характеризуются максимальной погрешностью (3 Равносигнальным РСП, кроме подверженности влиянию отраженных сигналов, свойственны и другие недостатки. Один из них – постоянство номинального угла глиссады
В курсовом радиомаяке с «опорным нулем» линия курса образуется двумя диаграммами антенной системы маяка. Рассмотрим данный вариант, где на КРМ от модуляторов на специальное устройство — фазирующий мост ФМ (рис. 12.26, а) — подают два модулированных колебания. Одно из них — обычное амплитудно-модулированное колебание с частотами модуляции Ω1 и Ω2, а второе — балансно -модулированное, боковые составляющие ω±Ω2 которого сдвинуты по фазе на 180° относительно составляющих ω±Ω1. Фазирующий мост обеспечивает синфазное питание облучателей О1 и О2 параболической антенной системы амплитудно-модулированными колебаниями и противофазное питание балансно-модулированными колебаниями. При синфазном питании облучатели О1 и О2 формируют диаграмму направленности 1, а при противофазном — диаграмму направленности 2 (см. рис.12.26, б). Результирующие диаграммы 3и 4показаны на том же рисунке. Обозначения ± 90 (± 150 ) соответствуют сдвигам по фазе на 180° составляющих поля с частотами модуляции F1 и F2. Сигнал, излучаемый в диаграмме направленности 1, может быть представлен как сумма двух амплитудно-модулированных колебаний с частотами модуляций Ω1 и Ω2:
В связи с этим диаграмму направленности 1 называют суммарной. В диаграмме направленности 2 излучается сигнал, который можно представить как разность двух амплитудно-модулированных колебаний При этом диаграмму 2 называют разностной диаграммой. Результирующая диаграмма излучения равна сумме суммарной и разностной диаграмм. Амплитуду результирующего поля с частотой модуляции F1=90 Гц определяют из полученных выражений
Рис.12.26. Схема курсового радиомаяка с «опорным нулем» (а) и диаграммы направленности антенной системы радиомаяка в горизонтальной плоскости (б)
Рис.12.27. Упрощенная функциональная схема курсового радиомаяка с «опорным нулем»
Амплитуда результирующего поля с частотой модуляции F2=150 Гц:
При одинаковой глубине модуляции в каналах модуляторов КРМ, т. е. при m1 = m 2 = m, амплитуда результирующего поля
Ер (φ) = E1 (φ) + E2 (φ) =
Согласно данного выражения видно, что коэффициенты в квадратных скобках при sin Ω1 t и sin Ω2 t определяют зависимость амплитуд частот модуляции от угла φ, т. е. глубину пространственной модуляции. Примем
Отклонения стрелки индикатора курса на самолете Δк пропорциональны разности глубин модуляции РГМ = (М1 – М2) = Нулевое положение стрелки индикатора курса соответствует такому углу φ0, при котором М1 = М2, т.е. РГМ = 0. Мы видим, что бортовое оборудование, которое обеспечивает работу канала курса при равносигнальном КРМ, обеспечит также работу при курсовом радиомаяке с «опорным нулем». Структурная схема одного из вариантов курсового радиомаяка с «опорным нулем» приведена на рис. 12.27. Высокочастотные колебания с передатчика ПРД поступают на разделительный мост РМ1, который необходим для исключения реакции цепей нагрузки на передатчик, а следовательно, и для предотвращения перекрестной модуляции в передатчике (кросмодуляции). Аналогичным целям служит и разделительный мост РМ2, с которого высокочастотные колебания подаются на балансные модуляторы БМ-90 и БМ-150, где они модулируются соответственно частотами 90 и 150 Гц. Полученные балансно-модулированные колебания суммируются в смесительном мосту СМ2 и питают боковые антенны (боковые облучатели О1 и ОЗ) радиомаяка. Кроме того, балансно- модулированные колебания поступают в смесительный мост СМ1, где к ним добавляются колебания несущей частоты с РМ1. В результате суммирования на выходе СМ1 образуется амплитудно-модулированное колебание с частотами модуляции 90 и 150 Гц, которое используется для питания центральной антенны (центрального облучателя 02) радиомаяка.
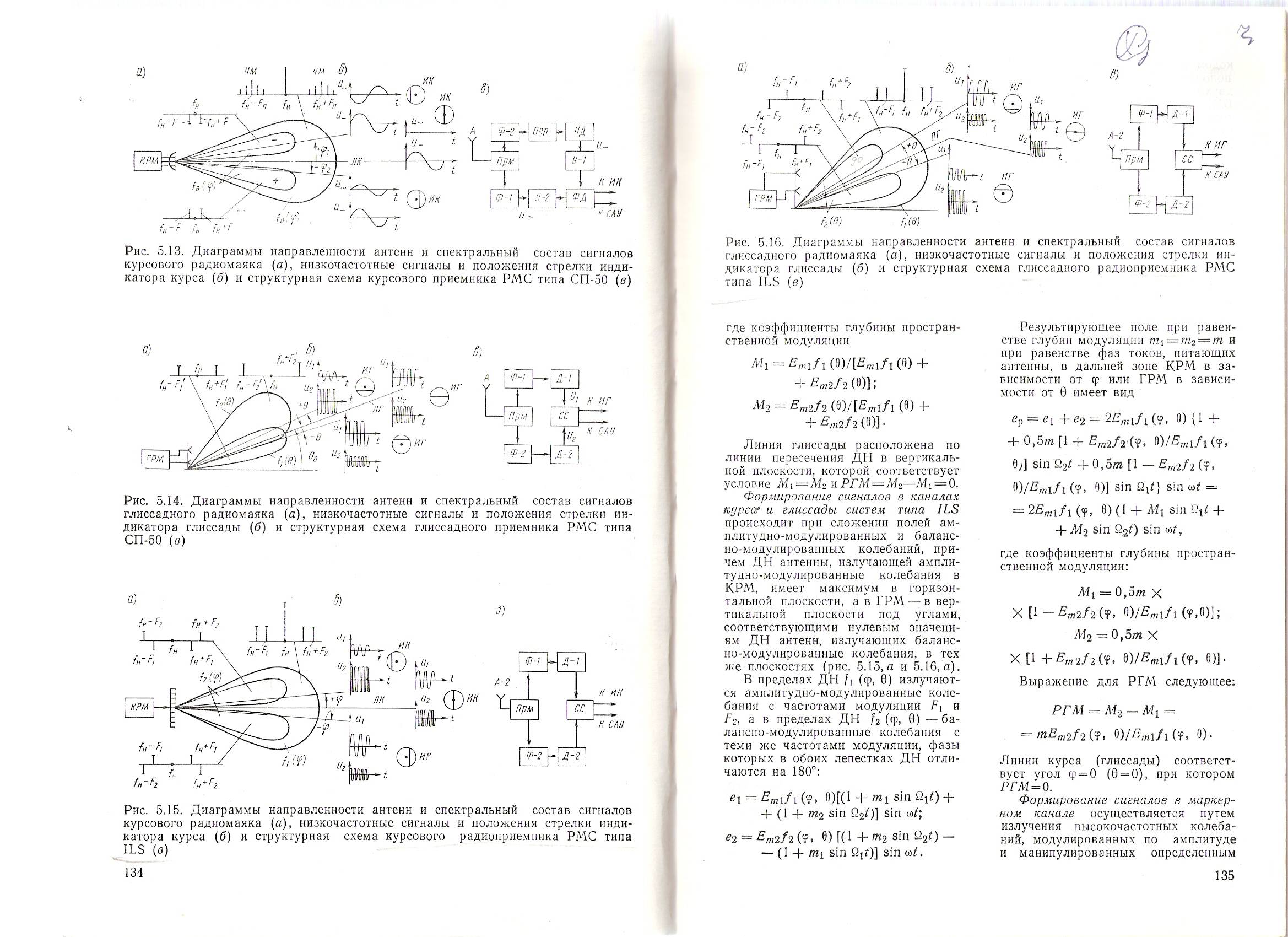
Рис.12.28 ДН антенн и спектр сигналов КРМ (а), НЧ сигналы и положение стрелки индикатора курса (б) и структурная схема КРП РМС типа ILS (в). В ГРМ с «опорным нулем» формирование глиссады аналогично формированию линии курса в курсовом радиомаяке с «опорным нулем» (см. рис. 12.29.).
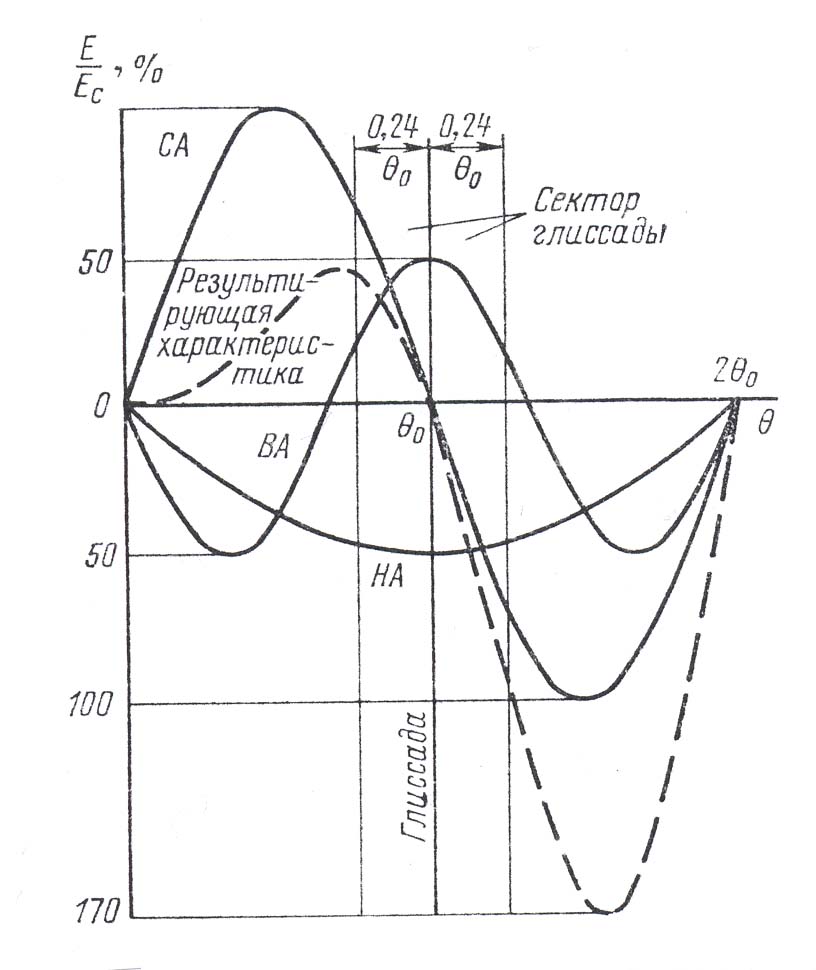
Рис.12.29. ДН антенн и спектр сигналов ГРМ (а), НЧ сигналы и положение стрелки индикатора глиссады (б) и структурная схема ГРП РМС типа ILS (в). Глиссадный радиомаяк с «опорным нулем» и компенсацией излучения под малыми углами к горизонту. Разновидностью глиссадного радиомаяка с «опорным нулем» является маяк с компенсацией излучения под малыми углами к горизонту. Такие радиомаяки позволяют уменьшить влияние переизлучателей, вызывающих, как будет показано ниже, искривление линии глиссады. С помощью дополнительной верхней антенны почти исключают влияние переизлучателей, высота которых над горизонтальной плоскостью невелика. Данная антенная система глиссадного радиомаяка с «опорным нулем» и компенсацией излучения под малыми углами к горизонту состоит из трех антенн. Соотношение амплитуд и фаз токов, питающих антенны, и коэффициенты модуляции излучаемых антеннами сигналов подбирают так, чтобы не только скомпенсировать излучение под углами порядка 1° к горизонту, но и обеспечить приемлемую линейность нарастания РГМ вблизи глиссады. Возможная диаграмма направленности рассматриваемого глиссадного радиомаяка приведена на рис. 12.30. На рис. 12.31.а показаны спектры сигналов, излучаемых нижней (НА), верхней (ВА) и средней (СА) антеннами под малыми углами к горизонту, а на рис. 12.31. б — спектр тех же сигналов, но при углах θ, близких к углу наклона глиссады θ 0.
Рис. 12.30.Диаграмма направленности по боковым частотам спектра сигнала антенной системы глиссадного радиомаяка с «опорным нулем» и с подавлением излучения под малыми углами к горизонту: СА- диаграмма средней антенны; ВА- диаграмма верхней антенны; НА – диаграмма нижней антенны:
Рис.12.31. Спектры сигналов глиссадного радиомаяка с «опорным нулем» и с подавлением излучения вблизи горизонта при малых углах к горизонту(а) и на линии глиссады (б).
Амплитуда суммарного поля всех трех антенн Ер(θ) может быть записана в виде где Ен (θ)=Еmнfн(θ); Eс (θ) = Emc fc (θ); Eв (θ) = Emв fв (θ);
Коэффициенты при sin Ω1 t и sin Ω2 t определяют зависимость глубины модуляции суммарного поля от угла Θ в вертикальной плоскости. Отклонение стрелки индикатора глиссады Δr пропорционально разности коэффициентов пространственной модуляции, т. е. РГМ = Данное выражение для РГМ является основным при анализе особенностей построения глиссадного радиомаяка с компенсацией излучения под малыми углами к горизонту.
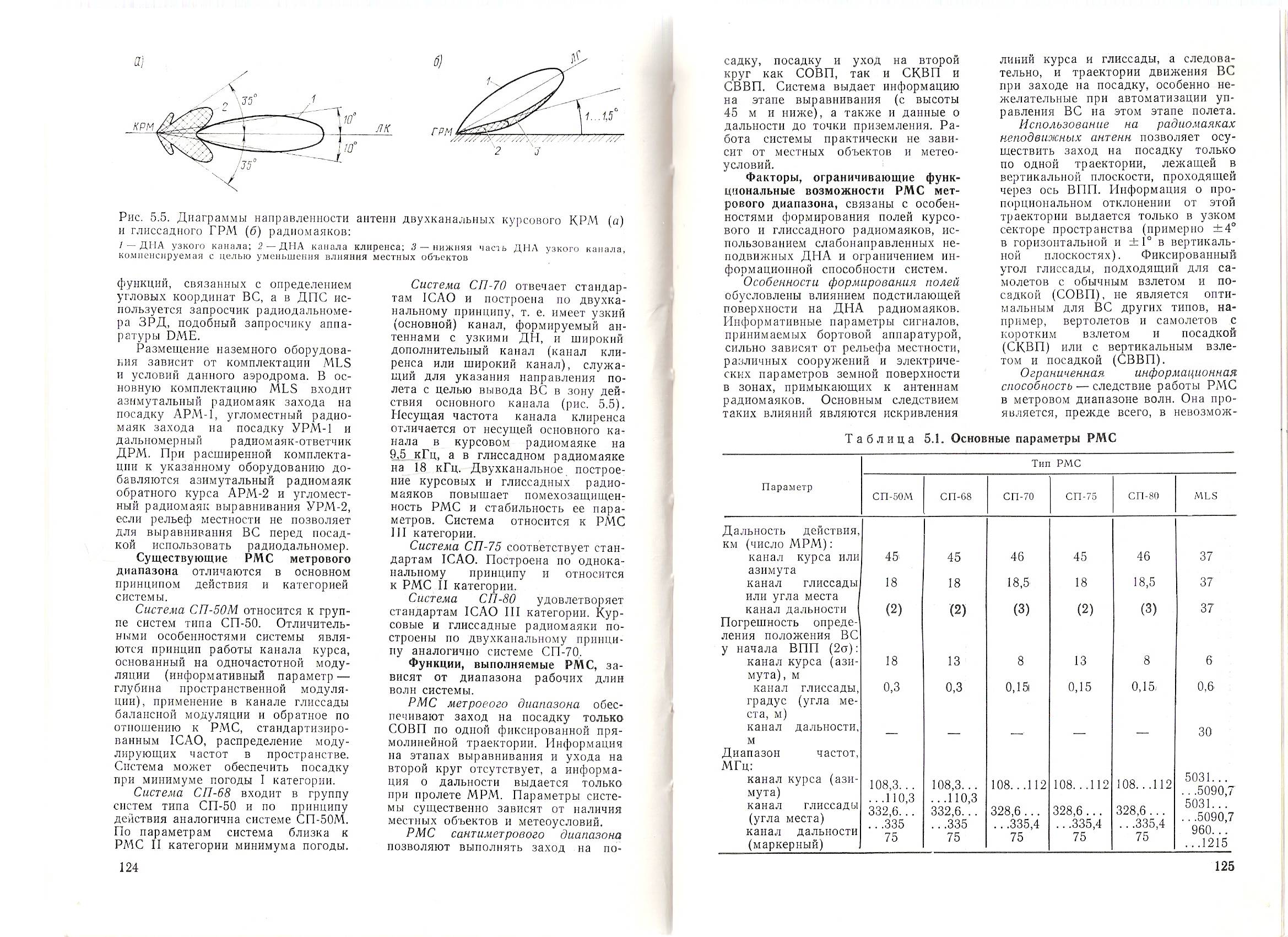
Двухканальные посадочные радиомаяки. Эффективным способом уменьшения искривлений линии курса и глиссады, является сужение диаграмм направленности антенных систем радиомаяков. В существующих радиомаяках повышенной точности применяют антенны с диаграммами направленности шириной не более 10°. При столь узких диаграммах зоны курса и глиссады сужаются до нескольких градусов, что существенно усложняет маневр самолета по выходу на линию курса или на глиссаду. Кроме того, при больших отклонениях от траектории посадки, что наблюдается на начальном этапе захода на посадку, при малой ширине зоны становится практически невозможным определение отклонения самолета от этой траектории. Для указания направления отклонения от траектории посадки при нахождении самолета вне пределов основной диаграммы направленности радиомаяка используют дополнительные диаграммы направленности. Построенный подобным образом радиомаяк называют двухканальным. Диаграммы направленности двухканального курсового радиомаяка в горизонтальной плоскости изображены в декартовой системе координат на рис. 12.32.
Рис. 12.32. Диаграммы направленности двухканального курсового радиомаяка в горизонтальной плоскости. 1- суммарная диаграмма основного канала. 2- разностная диаграмма основного канала. 3- разностная диаграмма канала клиренса. 4 – суммарная диаграмма канала клиренса.
Как видно из диаграмм этого рисунка, двухканальный радиомаяк формирует зону курса как радиомаяк с «опорным нулем» и по существу представляет собой два радиомаяка со своими диаграммами направленности. Диаграммы f1(φ) и f 2(φ) служат для точноговывода самолета на траекторию посадки и обеспечивают работу так называемого узкого канала курса или основного канала курсового радиомаяка. Диаграммы fк1 (φ) и fк2 (φ) служат только для указания направления выхода на траекторию посадки, т. е. для указания стороны отклонения от линии курса. Эти диаграммы обеспечивают работу дополнительного широкого канала курса. Схожее построение имеют и двухканальные глиссадные радиомаяки, в которых дополнительная диаграмма обеспечивает, главным образом, индикацию положения-глиссады при полете самолета под малыми углами к горизонту. Для формирования дополнительной диаграммы направленности здесь используют те же антенны, которые служат для формирования глиссады и подавления излучения основного канала под малыми углами. Дополнительный широкий канал часто называют каналом клиренса. Для того чтобы подавить переотраженные сигналы клиренсного канала, используют разность сигналов каналов по частоте или сдвиг по фазе модулирующих частот друг относительно друга на 90°. Соответствующие двухканальные радиомаяки называют радиомаяками с двухчастотным или квадратурным клиренсом. Радиомаяк с двухчастотным клиренсом излучает одинаковые модулирующие сигналы по обоим каналам, однако несущие частоты этих каналов сдвинуты друг относительно друга на величину Δ, составляющую несколько килогерц, т. е. частоты этих каналов могут одновременно проходить через УПЧ приемника. Различие в несущих частотах позволяет использовать для разделения каналов эффект подавления более слабого сигнала сильным при детектировании' в самолетном приемнике. Как следует из диаграмм рис. 12.32. вблизи линии курса, например, преобладает сигнал основного канала, а при отклонении самолета от линии курса на угол, превышающий 10°, преобладающее влияние оказывает канал клиренса. Рассмотрим процесс подавления сигнала канала клиренса при полете вблизи от линии курса. Воспользуемся при этом результатами, полученными для радиомаяков с «опорным нулем». Анализ влияния сигнала канала клиренса на основной канал в общем случае представляет собой достаточно сложную задачу. Однако, как показывает практика использования двухканальных систем посадки, при малых отклонениях от линии курса (наиболее важный случай), где коэффициенты глубины пространственной модуляции М1 и М2 основного канала близки по своим значениям, задача может быть упрощена. Действительно, в данном случае на входе приемника присутствуют два сигнала, разнесенных по частоте на величину Δ, существенно превышающую частоты модуляции Ω1 и Ω2 причем из-за того, что для основного канала │Δ–Ω1│ ≈ │Δ–Ω2│ влияние спектра сигнала канала клиренса на составляющие боковых частот спектра основного канала практически одинаково. Поэтому можно считать, что основное влияние оказывают составляющие, получаемые при взаимодействии спектра сигнала канала клиренса с несущей частотой основного канала. Разность глубин модуляции для результирующего сигнала имеет вид:
РГМр = РГМо.к+ (U2к.к./ 2U2о.к) Где РГМо.к ≈ 0 – разность глубин модуляции, определяемая основным каналом. РГМк.к - разность глубин модуляции по каналу клиренса. Данное выражение показывает, что в радиомаяках с двухчастотным клиренсом влияние канала клиренса на отклонение стрелки указателя положения на самолете уменьшается в U2к.к / U2о.к раз, что объясняется подавлением слабого сигнала детектором приемника. В радиомаяке с квадратурным клиренсом как модулирующие, так и несущие частоты обоих каналов одинаковые. Отличие сигналов в основном канале и канале клиренса заключается только в фазовом сдвиге составляющих спектра одного канала по отношению к фазе соответствующих составляющих другого канала. Указанный фазовый сдвиг приводит к тому, что сигналы одинаковых частот модуляции, но полученные из канала клиренса и основного канала, суммируются на выходе детектора приемника самолета геометрически (как квадратурные сигналы). При таком суммировании имеет место эффективное подавление сильным сигналом более слабого.
Рис. 12.33. ДН антенн 2х-канального КРМ (а) и ГРМ (б):1- ДНА узкого канала 2 – ДНА канала клиренса 3 – нижняя часть ДНА узкого канала, компенсируемая с целью уменьшения влияния местных объектов. Маркерный канал. Маркерные радиомаяки работают на частоте 75 МГц и располагаются вдоль продолжения оси ВПП со стороны захода самолета на посадку. По международным стандартам устанавливаются два или три радиомаяка. При установке трех радиомаяков несущая частота ближнего к ВПП маяка модулируется частотой 3000 Гц, среднего - частотой 1300 Гц и дальнего - частотой 400 Гц. Глубина модуляции составляет (95±4) %. Для опознавания маркерных радиомаяков, помимо разных частот модуляции, применяется различная манипуляция модулирующих частот: - для ближнего маяка - шесть точек в секунду непрерывно; - для среднего маяка - непрерывная последовательность чередующихся точек и тире, причем тире чередуются со скоростью два тире в секунду, точки - со скоростью шесть точек в секунду; - для дальнего маяка - два тире в секунду непрерывно. В системе СП-50 используются два маркерных радиомаяка - средний и дальний. Модулирующие частоты обоих маркерных маяков 3000 Гц. Манипуляция несущей частоты производится таким же образом, как и в маяках ILS.
| Поделиться:
| |
 . На ДРМ принятый сигнал после обработки в приемнике Прм–О подается на формирователь сигнала ответа ФСО, где изменяется интервал между импульсами. Излучаемый ДРМ на частоте
. На ДРМ принятый сигнал после обработки в приемнике Прм–О подается на формирователь сигнала ответа ФСО, где изменяется интервал между импульсами. Излучаемый ДРМ на частоте  сигнал ответа дальности ОД принимается бортовой аппаратурой ЛА и поступает после приемника Прм–З на цифровой измеритель времени ИВ, который включается в момент излучения ЗД. Измеритель времени вырабатывает код, содержащий информацию о
сигнал ответа дальности ОД принимается бортовой аппаратурой ЛА и поступает после приемника Прм–З на цифровой измеритель времени ИВ, который включается в момент излучения ЗД. Измеритель времени вырабатывает код, содержащий информацию о  . Задержка сигнала в аппаратуре ДРМ (
. Задержка сигнала в аппаратуре ДРМ ( ) поддерживается постоянной и учитывается при измерении. Для повышения точности длительности импульсов сигналов ЗД и ОД выбирают в пределах 1…3 мкс.
) поддерживается постоянной и учитывается при измерении. Для повышения точности длительности импульсов сигналов ЗД и ОД выбирают в пределах 1…3 мкс.
 после приема первого (пришедшего по кратчайшему пути) импульса запроса.
после приема первого (пришедшего по кратчайшему пути) импульса запроса. об/мин (600 град/с). В пределах этой ДНА излучаются непрерывные немодулированные колебания. Диаграмма ДН2 имеет в горизонтальной плоскости форму, близкую к окружности. С помощью ДН2 излучается опорный сигнал, представляющий собой две кодированные последовательности импульсов. Эти импульсы вырабатывает датчик, связанный с осью вращения антенны, создающей ДН1, и в соответствии с числом импульсов, приходящихся на один оборот ДН1, они называются опорными сигналами 35 («35») и 36 («36»). В момент, когда ось симметрии лепестков ДН1 совпадает с северным направлением меридиана, импульсы обеих последовательностей также совпадают, что служит сигналом начала отсчета времени (северный сигнал ОС) при определении азимута. Импульсы «36» следуют через каждые 10° оборота ДН1.
об/мин (600 град/с). В пределах этой ДНА излучаются непрерывные немодулированные колебания. Диаграмма ДН2 имеет в горизонтальной плоскости форму, близкую к окружности. С помощью ДН2 излучается опорный сигнал, представляющий собой две кодированные последовательности импульсов. Эти импульсы вырабатывает датчик, связанный с осью вращения антенны, создающей ДН1, и в соответствии с числом импульсов, приходящихся на один оборот ДН1, они называются опорными сигналами 35 («35») и 36 («36»). В момент, когда ось симметрии лепестков ДН1 совпадает с северным направлением меридиана, импульсы обеих последовательностей также совпадают, что служит сигналом начала отсчета времени (северный сигнал ОС) при определении азимута. Импульсы «36» следуют через каждые 10° оборота ДН1.
 , начало которого соответствует моменту прохождения минимума ДН1 через северное направление, а конец – средней точке азимутального сигнала, содержит информацию об азимуте
, начало которого соответствует моменту прохождения минимума ДН1 через северное направление, а конец – средней точке азимутального сигнала, содержит информацию об азимуте  точки приема
точки приема . (12.1)
. (12.1) компенсируется при определении азимута.
компенсируется при определении азимута. и через каждый интервал времени, соответствующий 10°, выдает импульс на счетчик Сч2. Азимутальный импульс АИ закрывает контрольное устройство КУ и разрешает перепись содержимого счетчиков через схемы переписи СП в запоминающие устройства ЗУ. С этих устройств снимается код азимута, так как при известном периоде
и через каждый интервал времени, соответствующий 10°, выдает импульс на счетчик Сч2. Азимутальный импульс АИ закрывает контрольное устройство КУ и разрешает перепись содержимого счетчиков через схемы переписи СП в запоминающие устройства ЗУ. С этих устройств снимается код азимута, так как при известном периоде  счетных импульсов их число
счетных импульсов их число  является мерой азимута
является мерой азимута  . Счетчик Сч1 выполняет функцию точного измерения азимута, а Сч2 – грубого.
. Счетчик Сч1 выполняет функцию точного измерения азимута, а Сч2 – грубого.
 , по времени совпадающее со срезом первого импульса азимутального сигнала АС (рис. 9.11,б). Такая ситуация возможна для объектов, азимут которых
, по времени совпадающее со срезом первого импульса азимутального сигнала АС (рис. 9.11,б). Такая ситуация возможна для объектов, азимут которых  лежит в пределах
лежит в пределах  , где
, где  – суммарная ширина двух лепестков ДН1.
– суммарная ширина двух лепестков ДН1.
 , и длительности среза импульса АС, равной
, и длительности среза импульса АС, равной  , составляет
, составляет (12.2)
(12.2) – приращение напряжения АС в точке отсчета
– приращение напряжения АС в точке отсчета  – амплитуда АС.
– амплитуда АС. . Уменьшение
. Уменьшение  приводит к снижению темпа поступления информации и к возможности существенного изменения азимута ЛА за один оборот ДН1. Повышение крутизны
приводит к снижению темпа поступления информации и к возможности существенного изменения азимута ЛА за один оборот ДН1. Повышение крутизны  достигается сужением ДН1, при этом также уменьшается вероятность одновременного появления отражающего сигнала объекта и ЛА в пределах ДН1. С учетом всех дестабилизующих факторов точность импульсного азимутального канала соответствует
достигается сужением ДН1, при этом также уменьшается вероятность одновременного появления отражающего сигнала объекта и ЛА в пределах ДН1. С учетом всех дестабилизующих факторов точность импульсного азимутального канала соответствует  .
. и
и  , точка пересечения которых соответствует заданной линии глиссады ЛГ (рис. 12.24,а), и излучают непрерывные АМ колебания, несущие частоты которых равны, а частоты модуляции составляют
, точка пересечения которых соответствует заданной линии глиссады ЛГ (рис. 12.24,а), и излучают непрерывные АМ колебания, несущие частоты которых равны, а частоты модуляции составляют  =90 Гц, а
=90 Гц, а  =150 Гц. В точке приема действует сигнал, равный сумме напряженностей полей, создаваемых антеннами ГРМ:
=150 Гц. В точке приема действует сигнал, равный сумме напряженностей полей, создаваемых антеннами ГРМ: ;
;  , (12.8)
, (12.8) – амплитуда напряженности поля;
– амплитуда напряженности поля;  – коэффициент АМ;
– коэффициент АМ;  и
и  .
. (12.9)
(12.9)
 и
и  определяют зависимость амплитуд колебаний частот модуляции от угла
определяют зависимость амплитуд колебаний частот модуляции от угла  и называются коэффициентами глубины пространственной модуляции:
и называются коэффициентами глубины пространственной модуляции: ,
,  . (12.10)
. (12.10) . (12.11)
. (12.11) и РГМ > 0, а при полете ЛА ниже линии глиссады РГМ < 0 (рис. 12.24,б).
и РГМ > 0, а при полете ЛА ниже линии глиссады РГМ < 0 (рис. 12.24,б). и
и  , используется автоматическая регулировка усиления АРУ приемника Прм (рис. 12.24,в) по суммарному сигналу. Фильтры Ф90 и Ф150 выделяют сигналы с частотами модуляции
, используется автоматическая регулировка усиления АРУ приемника Прм (рис. 12.24,в) по суммарному сигналу. Фильтры Ф90 и Ф150 выделяют сигналы с частотами модуляции  и
и  . В схеме сравнения СС образуется разность этих сигналов, пропорциональная РГМ и несущая информацию об угловом отклонении
. В схеме сравнения СС образуется разность этих сигналов, пропорциональная РГМ и несущая информацию об угловом отклонении  от линии глиссады.
от линии глиссады.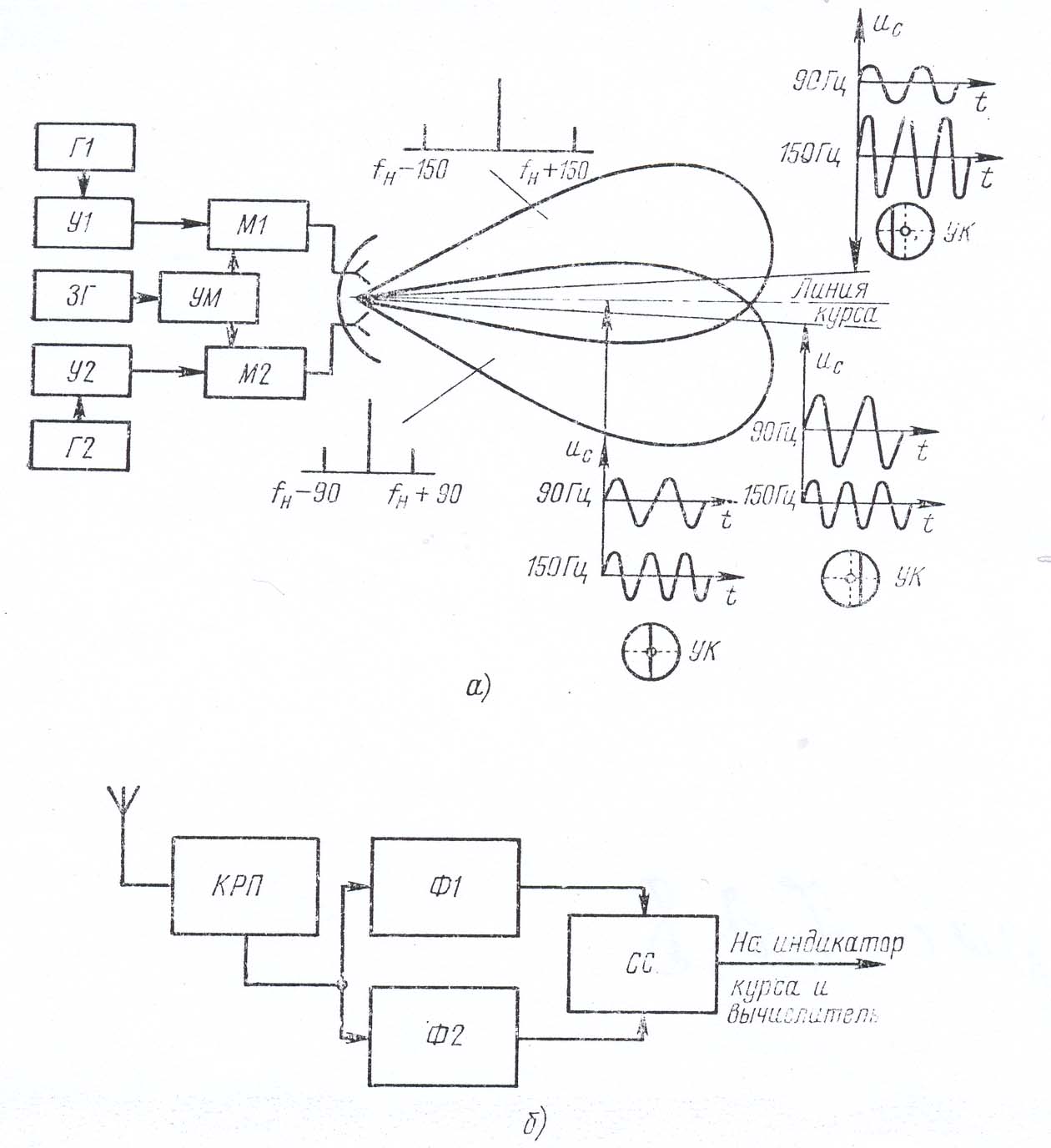

 Результирующее поле антенн курсовых радиомаяков равно сумме полей е1 и е2. В курсовых равносигнальных радиомаяках необходимое условие Еm1 = Еm2 = Еm, при этом результирующее поле
Результирующее поле антенн курсовых радиомаяков равно сумме полей е1 и е2. В курсовых равносигнальных радиомаяках необходимое условие Еm1 = Еm2 = Еm, при этом результирующее поле

 и таким образом РГМ = 0.
и таким образом РГМ = 0.  из (12.11) можно получить основное уравнение равносигнальной РСП:
из (12.11) можно получить основное уравнение равносигнальной РСП: . (12.12)
. (12.12) , получаем
, получаем ;
;  , (12.13)
, (12.13) – пеленгационная чувствительность.
– пеленгационная чувствительность. и
и  . Увеличение
. Увеличение  ограничено тем, что в суммарном сигнале
ограничено тем, что в суммарном сигнале  общий коэффициент модуляции на РСН не должен превышать 1. Уменьшение
общий коэффициент модуляции на РСН не должен превышать 1. Уменьшение  ведет к снижению дальности действия РСП. Поэтому наиболее целесообразным средством повышения точности следует считать увеличение
ведет к снижению дальности действия РСП. Поэтому наиболее целесообразным средством повышения точности следует считать увеличение  ), составляющей примерно 0,3° в канале глиссады и 0,25° в канале курса.
), составляющей примерно 0,3° в канале глиссады и 0,25° в канале курса. – связан с применением на ГРМ неподвижных антенн. Этот недостаток не позволяет оптимизировать угол
– связан с применением на ГРМ неподвижных антенн. Этот недостаток не позволяет оптимизировать угол  для ЛА с разными характеристиками. Кроме того, траектория посадки вблизи точки приземления находится в ближней зоне антенн глиссадного радиомаяка, что приводит к ненадежности информации о
для ЛА с разными характеристиками. Кроме того, траектория посадки вблизи точки приземления находится в ближней зоне антенн глиссадного радиомаяка, что приводит к ненадежности информации о  и вынуждает использовать на заключительном этапе посадки радиовысотомер как главный датчик положения ЛА в вертикальной плоскости.
и вынуждает использовать на заключительном этапе посадки радиовысотомер как главный датчик положения ЛА в вертикальной плоскости.











 ,
,