Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Оптимизация решения Задачи №5
Одна из важнейших задач программиста, это не только решение поставленной задачи, а поиск оптимального решения, которое позволяет экономить память и вычислительные ресурсы. Давайте еще раз вернемся к решению Задачи №5. Обозначим через D 1 - диаметр колеса нашего робота, а через D 2 - расстояние между центрами колес. Тогда расстояние, пройденное каждым колесом при развороте может быть найдено по формуле: Расстояние, которое проезжает робот за один оборот, выражается формулой: Разделив первую формулу на вторую, вычислим значение оборотов двигателя для разворота робота: Чтобы получить необходимое нам значение градусов, умножим предыдущую формулу на 360: Итак: для того, чтобы развернуть нашего робота на 180 градусов, мы должны расстояние между центрами колес разделить на диаметр колеса и умножить на 180. Наша формула значительно упростилась и имеет замечательное следствие: если мы вместо 180 поставим в нашу формулу произвольное значение, то именно на этот угол в итоге повернет вокруг своей оси наш робот! Решим нашу Задачу №5 с помощью программного блока "Математика" в режиме "Дополнения":
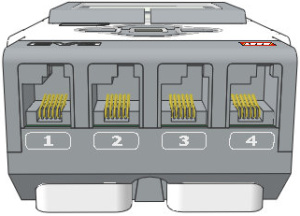
Урок №4 - Изучаем датчик касания Конец формы Содержание урока Введение: В состав конструктора Lego mindstorms EV3 входят различные датчики. Главная задача датчиков - представлять информацию из внешней среды модулю EV3, а задача программиста - научиться получать и обрабатывать эту информацию, подавая необходимые команды моторам робота. На протяжении ряда уроков мы будем последовательно знакомиться со всеми датчиками, входящими и в домашний, и в образовательный наборы, научимся взаимодействовать с ними и решать наиболее распространенные задачи управления роботом. Изучаем первый датчик – датчик касания Для подключения датчиков к модулю EV3 предназначены порты, обозначенные цифрами "1", "2", "3" и "4". Таким образом, к одному модулю EV3 одновременно можно подключить до четырех различных датчиков. Все порты абсолютно равнозначны и вы можете подключать датчики к любым портам, главное - будьте внимательны при указании номера порта для соответствующих датчиков в ваших программах.
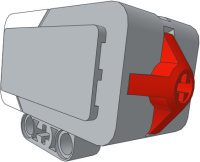
Рис. 1 Первым датчиком, который мы изучим, будет датчик касания (Рис. 2).
Рис. 2 Этот датчик, по сути, представляет собой специальную кнопку, которая может находиться в двух состояниях: "Нажатие" (Рис. 3 поз. 1) или "Освобождение" (Рис. 3 поз. 2). Также, последовательный переход в состояние "Нажатие", а затем "Освобождение" называется: "Щелчок" (Рис. 3 поз. 3) и может обрабатываться программой. как самостоятельное событие.
Рис. 3
|
|||||
|
|
Последнее изменение этой страницы: 2019-12-15; просмотров: 151; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.138.174.195 (0.004 с.) |