
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Розрахунок повзунів вертикальних пресів з додатковими напрямними
Повзуни з додатковими напрямними, розташованими на хоботі, мають свої особливості розрахунку. Повзуни з додатковими напрямними піддаються не центральному навантаженню через зсув рівнодіючої сили деформації в різних переходах штампування. В результаті виникає перекошування повзуна для зменшення чого і використовуються додаткові напрямні. Хобот повзуна вважається пружним елементом, деформування якого залежить від моменту опору на згин і зазорів в основних і додаткових напрямних. У загальному випадку повзун піддається вигину як у площині рівнобіжної осі головного вала, так і в площині обертання кривошипа. З урахуванням співвідношення розмірів поперечних перерізів і діючих навантажень звичайно міцність повзуна визначається не міцністю власне тіла повзуна, а міцністю хоботу. Як розрахунковий прогину хоботу приймається максимально можливий прогин при стійкому положенню повзуна в період робочого ходу. Таблиця 5.1 Механічні властивості матеріалів повзунів і шатунів
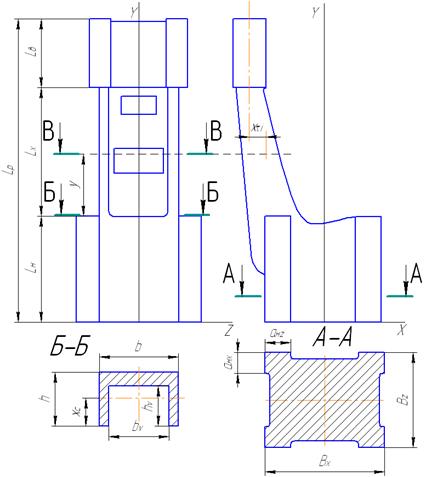
Після визначення реакцій на напрямних виходячи з припустимого питомого зусилля на напрямні розраховують діаграму припустимого нецентрального навантаження (див. п. 5.3). В вертикальних пресах найнебезпечнішим вважається таке положення повзуна, коли він торкається головних напрямних в двох точках, а в додаткових напрямних зазор вибирається з самого початку перекошування. На рис. 5.1 показана розрахункова схема повзуна КГШП, а на рис. 5.2 – небезпечні перерізи повзуна. Приймається, що момент інерції перетину по довжині хоботу змінюється за законом трапеції
де J Zmax – максимальний момент інерції перетину в підстави хоботу щодо осі Z; ΔJ – максимальний перепад моментів інерції ΔJ = J Zmax / J Zmin;
J Zmin – мінімальний момент інерції перетину хоботу; Lx – довжина хоботу; y – відстань розглянутого перетину від крайки нижніх напрямних.
Рис. 5.1. Розрахункова схема повзуна з додатковими напрямними а – у площині обертання ГВМу; б – у площині обертання головного вала
Рис. 5.2. Небезпечні перерізи повзуна КГШП
При навантаженні повзуна в площині XOY (тобто попереду – назад) у довільному перетині хоботу А–А виникають напруги
де Е – модуль пружності матеріалу повзуна, для сталі Е =2,1.105 МПа, для чавуну Е =0,9.105 МПа; х c – координата центра ваги розглянутого перетину; δ – прогин хоботу в площині XOY, що залежить від співвідношення зазорів в основних Δнx і додаткових Δвx напрямних у цій же площині
Δt – температурне розширення нижньої частини повзуна, Δt = αBt; α = 11.10–6 – коефіцієнт лінійного розширення для сталі; t – різниця температур верхньої і нижньої частини повзуна (див. п. 5.1); L п – повна довжина повзуна, тобто відстань від нижньої площини до верхньої частини додаткових напрямних; k j – коефіцієнт, що визначає зміна моменту інерції перетину по довжині хоботу. При Δ J =1; 2; 3; 4; 5 відповідно k j=1; 0,88; 0,81; 0,78; 0,755. При навантаженні повзуна в площині ZOY (тобто ліворуч – праворуч) напруги вигину в довільному перетині А–А визначаються аналогічним образом
де J Xmax і b1 – ширина перетину; δ2 – прогин хоботу повзуна в площині ZOY. Вигин хоботу при такому навантаженні розглядається разом з вигином шатуна в цій же площині (рис. 5.1, б). Поточний прогин хоботу δ2 визначається по формулі
де E х, E ш – відповідно, модуль пружності матеріалу хоботу і шатуна; x – ексцентриситет прикладення зусилля (див. рис. 5.1.); J ш – середній момент інерції перетину шатуна; Δнz, Δнz – зазори в основних і додаткових напрямних у площині ZOY; L – довжина шатуна. Як правило вплив вигину шатуна на міцність повзуна незначний, тому ним можна нехтувати. Тоді вигин хоботу визначається по формулі (5.6) з урахуванням того, що зазори в напрямних Δнz і Δнz в площині ZOY в загальному випадку відрізняються від зазорів Δнx і Δнx в площині XOY.
Унаслідок розбіжності центра ваги перетину і місця дотику зусилля
де M k =
x τ – відстань від центра ваги перетину А-А до середини додаткових напрямних; δ max – максимальна товщина перетину; η – коефіцієнт, рівний 1,12 для перетину коритоподібної форми; b i, δ i – відповідно, поточні ширина і товщина ділянок перетину А–А. Максимальна напруга в перетині А–А, виходячи з гіпотези найбільших дотичних напружень, дорівнює
Коефіцієнт запасу міцності [n] приймається рівним 1,3…1,5. Розрахунок максимальної напруги виконується в декількох перетинах по довжині хоботу, з урахуванням того, що силові фактори і характеристики перетину змінюються з різною інтенсивністю при переміщенні від нижніх напрямних до верхніх.
|
|||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-02-22; просмотров: 217; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.138.118.250 (0.01 с.) |
 , (5.4)
, (5.4)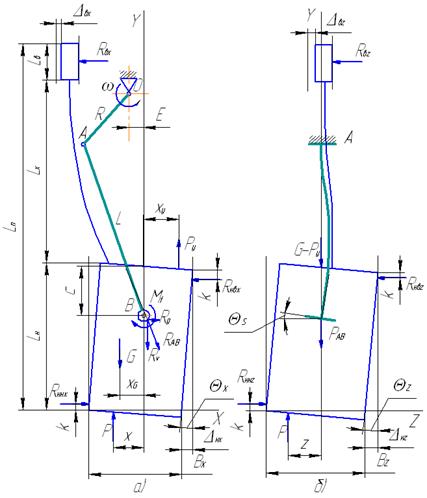
 , (5.5)
, (5.5) , (5.6)
, (5.6) , (5.7)
, (5.7) – відповідно, максимальний і діючий момент інерції перетинів щодо осі X;
– відповідно, максимальний і діючий момент інерції перетинів щодо осі X; , (5.8)
, (5.8) до верхніх напрямних у площині XOZ виникає момент, що скручує, що створює дотичні напруження в розглянутому перетині
до верхніх напрямних у площині XOZ виникає момент, що скручує, що створює дотичні напруження в розглянутому перетині , (5.9)
, (5.9) ; (5.10)
; (5.10) . (5.11)
. (5.11)


