
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
По основным разделам статики ⇐ ПредыдущаяСтр 7 из 7
Рассмотрим компьютерные варианты задач по основным разделам статики, представленные на рис. 6.1, для решения которых и анализа результатов требуется программное обеспечение. Линейные размеры и действующие на конструкцию нагрузки приведены в таблице 6.1. Физико-математические модели соответствуют номеру рисунка схемы. Вариант 1. Положение стержня AB, весом Вариант 2. Положение L - образного рычага определяется канатом BE, закрепленным в точке B. Зная, что на стержень действует сила Вариант 3. Тонкий стержень AB, весом G и длиной Вариант 4. Панель ABC весом
G =0.09 кH. Вариант 5. Однородная стальная плита ABCD, весом G, приварена к валу EF, и удерживается в указанном на рисунке положении Вариант 6. В представленном на рисунке механизме положение стрелы AC управляется стержнем BD. Для заданной силы Вариант 7. Ферма ABC, состоящая из трех невесомых стержней, закреплена в точке A цилиндрическим шарниром, а точке С ¾ цилиндрическим шарниром на катках. Определить усилия в стержнях, вызываемые силой Вариант 8. Стержень CD прикреплен к втулке D ипроходит через втулку, приваренную к концу B рычага AB. Принимая за начальное положение рычага AB, указанное на рисунке при Вариант 9. Однородная круглая пластина радиуса R и веса
Вариант 10. Груз массой m, подвешенный к тросу, удерживается пружиной AB жесткостью с. Длина недеформированной пружины соответствует положению механизма, когда угол q = 0. Зная, что жесткость пружины с =1 кН/ м, используя вычислительное программное обеспечение, а) вычислить и графически построить функциональную зависимость массы груза m,
Рис. 6.1 Схемы конструкций
Рис. 6.1 (окончание)
соответствующую равновесию системы, в функции угла q, т.е. Т а б л и ц а 6.1 Исходные данные
П р и л о ж е н и е Образец оформления титульного листа
Балтийский государственный технический университет «ВОЕНМЕХ» им. Д.Ф. Устинова Кафедра теоретической механики и баллистики
СТАТИКА Расчетная (курсовая) работа Тема: 1. Плоская система сил: Расчетная работа № 1. Равновесие тела, которое может опрокиды ваться, вариант №____ Расчетная работа № 2. Равновесие произвольно расположенной системы сил, действующих на одно тело, вариант №____ Расчетная работа № 3. Равновесие произвольно расположенной системы сил, действующих на сочлененные тела, вариант №____ Тема: 2. Пространственная система сил Расчетная работа № 4. Равновесие пространственной системы сил, вариант №____ Тема: 3. Центр тяжести твердого тела Расчетная работа № 5. Центр тяжести твердого тела, вариант №____ Тема: 4. Компьютерные варианты задач по статике, вариант №____ Фамилия И.О. студента _______________ факультет, группа ____________________ Преподаватель ______________________ Дата сдачи ___________________________
Санкт-Петербург
О Г Л А В Л Е Н И Е Предисловие……………………………………………………………… 3 1. ОБЩИЕ ТРЕБОВАНИЯ К ОФОРМЛЕНИЮ РАСЧЕТНОЙ И КУРСОВОЙ РАБОТЫ………………………………………………..5 2. КРАТКИЕ СВЕДЕНИЯ ИЗ ТЕОРИИ…………………………………6 Типичные виды связей и их реакции………………………………...7 Момент силы относительно точки и относительно оси …..……….8 3. РАВНОВЕСИЕ ПЛОСКОЙ ПРОИЗВОЛЬНОЙ СИСТЕМЫ СИЛ 12 3.1. Равновесие одного тела…………………………………………13 Расчетная работа №1. Равновесие тела, которое может
опрокидываться………………………………………………………14 Расчетная работа №2. Равновесие плоской произвольно расположенной системы сил ………………………………………… 3.2.Равновесие сочлененных (связанных) тел……………………. Расчетная работа №3. Равновесие сочлененных тел……… 4. РАВНОВЕСИЕ ПРОСТРАНСТВЕННОЙ СИСТЕМЫ СИЛ…. Расчетная работа №4. Равновесие пространственной системы сил Примеры выполнения расчетной работы №4..………………………48 5. ЦЕНТР ТЯЖЕСТИ ТВЕРДОГО ТЕЛА………………………………… 5.1. Определения, свойства и координаты центра тяжести………. 5.2. Методы нахождения центра тяжести…………………………. Расчетная работа №5. Центр тяжести однородных плоских фигур, линий и объемных тел……………………………………….. Пример выполнения расчетной работы №5..……………………….. 6. КОМПЬЮТЕРНЫЕ ВАРИАНТЫ ЗАДАЧ ПО ОСНОВНЫМ РАЗДЕЛАМ СТАТИКИ……………………………………………… П р и л о ж е н и е. Образец оформления титульного листа………
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-02-19; просмотров: 174; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.144.45.137 (0.04 с.) |
 , один конец которого закреплен в неподвижном шарнире A, другой конец опирается на шарнир тележки D, изменяется при медленном перемещении тележки D влевопод действием силы P. Пренебрегая трением, используя компьютерное программное обеспечение, вычислить и построить график изменения величины силы P как функции
, один конец которого закреплен в неподвижном шарнире A, другой конец опирается на шарнир тележки D, изменяется при медленном перемещении тележки D влевопод действием силы P. Пренебрегая трением, используя компьютерное программное обеспечение, вычислить и построить график изменения величины силы P как функции  , т.е.
, т.е.  при изменении
при изменении  . Определить максимальное значение силы
. Определить максимальное значение силы  и соответствующее ему значение
и соответствующее ему значение  , используя компьютерное программное обеспечение, вычислить и графически отобразить
, используя компьютерное программное обеспечение, вычислить и графически отобразить  как функции угла поворота стержня
как функции угла поворота стержня  при изменении его в следующих пределах
при изменении его в следующих пределах  . Определить максимальное значение силы
. Определить максимальное значение силы  и соответствующее ему значение
и соответствующее ему значение  , шарнирно связан с ползунами A и B, свободно перемещающихся соответственно в вертикальной и горизонтальной направляющих. Жесткость пружины
, шарнирно связан с ползунами A и B, свободно перемещающихся соответственно в вертикальной и горизонтальной направляющих. Жесткость пружины  , пружина не напряжена при горизонтальном положении стержня AB. Пренебрегая весом ползунов, вывести уравнения движения стержня в зависимости от
, пружина не напряжена при горизонтальном положении стержня AB. Пренебрегая весом ползунов, вывести уравнения движения стержня в зависимости от  и
и  , которые должны удовлетворять условиям равновесия стержня. Для заданных величин
, которые должны удовлетворять условиям равновесия стержня. Для заданных величин  a) вычислить и построить график изменения величины жесткости
a) вычислить и построить график изменения величины жесткости  , при изменении
, при изменении  b) определить два значения угла
b) определить два значения угла 
 удерживается в положении равновесия под углом
удерживается в положении равновесия под углом  при изменении угла
при изменении угла  Определить величину угла
Определить величину угла  моментом пары
моментом пары  . Учитывая, что подшипники предотвращают скольжение вала вдоль EF и что вал лежит в плоскости
. Учитывая, что подшипники предотвращают скольжение вала вдоль EF и что вал лежит в плоскости  построить график изменения величины момента пары
построить график изменения величины момента пары  при изменении угла
при изменении угла  вычислить реакцию в шарнире A и момент пары
вычислить реакцию в шарнире A и момент пары  , удерживающие систему в положении равновесия, и графически построить зависимости: реакции в шарнире A ¾
, удерживающие систему в положении равновесия, и графически построить зависимости: реакции в шарнире A ¾  и момента пары
и момента пары  и
и  Определить также a) величину угла
Определить также a) величину угла  ; b) величину угла
; b) величину угла  .
. , и отобразить графически изменения этих усилий для каждого стержня при изменении параметра
, и отобразить графически изменения этих усилий для каждого стержня при изменении параметра  в следующем диапазоне:
в следующем диапазоне:  .
. для 15 ° £
для 15 ° £  =0.03 кН помещен на пластину в точку D и от нее начинает медленно двигаться вдоль диаметра CD, пока не достигает точки C. Графически построить зависимость сил натяжения проволок A и C в функции перемещения a, где a - расстояние груза Е от точки D;определить значение a, при котором силы натяжения проволок A и C являются минимальными.
=0.03 кН помещен на пластину в точку D и от нее начинает медленно двигаться вдоль диаметра CD, пока не достигает точки C. Графически построить зависимость сил натяжения проволок A и C в функции перемещения a, где a - расстояние груза Е от точки D;определить значение a, при котором силы натяжения проволок A и C являются минимальными.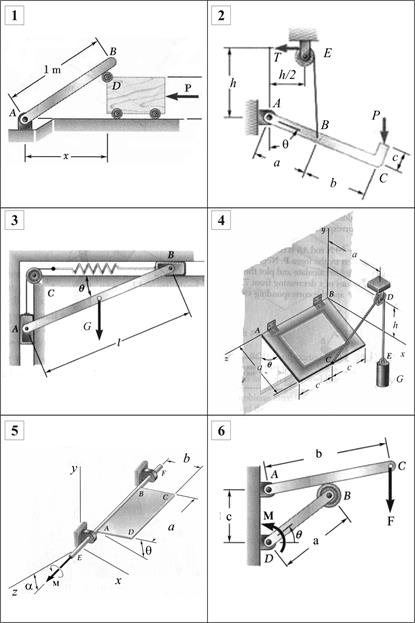

 для значений угла q от 0 до 90 °, т.е. 0£ q £ 90°. b) Определить величину q, соответствующую равновесию системы, когда масса груза m = 2 кг.
для значений угла q от 0 до 90 °, т.е. 0£ q £ 90°. b) Определить величину q, соответствующую равновесию системы, когда масса груза m = 2 кг.




