Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Нечеткие регуляторы исполнительного уровня
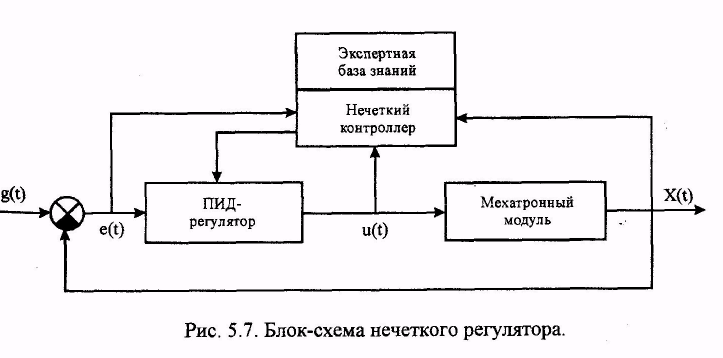
Методологической основой для проектирования нечетких регуляторов является концепция нечеткой логики. В основе стандартных современных компьютеров лежит логика «четкого мира». Они работают только с двумя базовыми логическими переменными «Да» и «Нет» и детерминированными числовыми данными, поэтому свойства этого мира описываются совокупностями нулей и единиц Однако на практике очень часто приходится иметь дело с неопределенными, нестрогими свойствами объектов и процессов, которые не могут быть формализованы в понятиях «четкого мира». Общий смысл этих понятий нам очевиден, но сделать однозначный вывод о принадлежности конкретного объекта к данному множеству только с помощью слов «Да» и «Нет» зачастую затруднительно, необходимо узнать мнение нескольких экспертов. Английское слово «fuzzy», буквально означающее «ворсистый», «пушистый» – специальный термин, определяющий свойство тканей. Рисунок ворсистой ткани кажется нам размытым, нечетким, неясно очерченным, что соответствует образам «нечеткого мира». Целесообразность применения методов нечеткой логики при управлении мехатронными системами обусловлена особенностями постановки задач управления, которые заключаются в априорной неопределенности возмущающих воздействий, переменности параметров мехатронных объектов управления и в сложности построения аналитических моделей систем. Характерно, что теория нечетких множеств была предложена проф. Л. Заде именно для решения проблем управления сложными техническими системами. Структурная схема нечеткого регулятора с параметрической адаптацией приведена на рисунке 4.4. Нечеткий контроллер функционирует на основе экспертной базы знаний и выполняет следующие основные операции: – преобразование данных о переменных состояния системы в нечеткую форму (операция фазификации), хранение и обработка нечеткой информации; – выполнение нечетких выводов по лингвистическим правилам управления, заложенным в базу знаний; – перевод нечетких переменных в четкое представление для управления системой (операция дефазификации). Для математического представления нечеткой информации используются нечеткие множества, состав объектов которых зависит от мнения экспертов, цели и времени формирования множества. Состав множества задается с помощью функций принадлежности, имеющих вероятностный характер. Так, выражение mА (Х) = С означает, что элемент А принадлежит множеству X с вероятностью С.
Рис. 4.4. Блок-схема нечеткого регулятора
Функции принадлежности допускают графическую интерпретацию, при этом по оси ординат может откладываться как числовая, так и лингвистическая переменная, причем возможно как непрерывное, так и дискретное представление функции. В качестве иллюстрации на рисунке 4.5 приведены графики функций принадлежности, описывающие для сигнала рассогласования e(t) в замкнутой системе (рис. 4.4) нечеткое множество X = «Большая ошибка» (по оси абсцисс отложена безразмерная величина относительной ошибки е0 = | e | / а (здесь:
Рис. 4.5. Графическое представление функций принадлежности: (а) – непрерывная числовая функция принадлежности; (б) – дискретная числовая функция принадлежности; (в) – дискретная лингвистическая функция принадлежности
Лингвистические значения – это уровни, присвоенные описательной информации в результате экспертного опроса. Важно подчеркнуть, что они соответствуют числовой вероятностной функции, поэтому для их хранения в базе знаний можно использовать стандартные формы (например, двумерные массивы). Разработан математический аппарат, позволяющий выполнять над нечеткими множествами и функциями принадлежности все необходимые операции при фазификации. Лингвистические правила управления (ЛПУ) рассмотрим на примере построения нечеткого ПИД-регулятора для управления скоростью движения мехатронного модуля (рис. 4.4). Уравнение ПИД-регулятора в непрерывной форме имеет вид (4.1). Для малых периодов квантования Т это уравнение можно преобразовать в разностное, если заменить производную разностью первого порядка, а интеграл – суммой. При использовании численного интегрирования по методу прямоугольников получаем для k-го шага управления:
Для вычисления суммы на текущем i-м шаге, входящей в данное уравнение, необходимо помнить все предыдущие значения сигнала ошибки e(k), k=0,...,i. Поэтому этот алгоритм мало эффективен для управления в реальном времени. Для получения рекуррентного алгоритма достаточно вычесть из уравнения (4.3) следующее уравнение:
В результате получим формулу для определения приращения управляющего сигнала:
где В уравнении (4.4) первое слагаемое соответствует пропорциональной компоненте ПИД- регулятора, второе слагаемое – интегральной компоненте, а третье – дифференциальной составляющей регулятора. На основании выражения (4.4) составлены следующие ЛПУ для нечеткого контроллера:
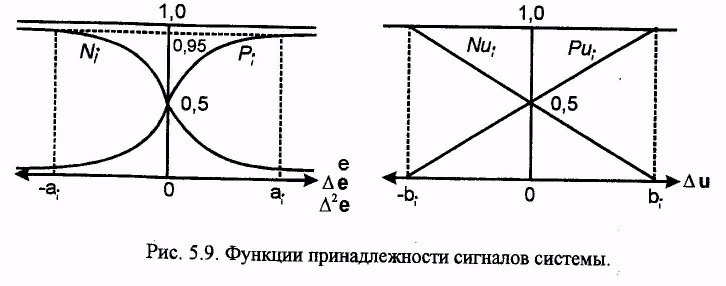
Здесь величины Pi, Pui и Ni, Nui (i = l, 2, 3) – соответственно положительные и отрицательные переменные для сигналов рассогласования и управления, функции принадлежности которых представлены на рисунке 5.6. Функции принадлежности для сигнала ошибки имеют вид кривой с насыщением (типа арктангенса), для управляющего сигнала – обычную линейную форму.
Рис. 4.6. Функция принадлежности сигналов системы Правило ЛПУ1 означает, что «если текущая скорость x(k) меньше заданной (другими словами, ошибка e(k) положительна), то увеличить управляющий сигнал». Правило ЛПУ4: «если скорость возрастает (т. е. приращение ошибки отрицательно), то понизить управляющий сигнал». Можно заметить, что в ряде ситуаций нечеткий вывод должен заключаться в компромиссе между противоположными по знаку действиями (например, по правилам ЛПУ1 и ЛПУ4). Результатом нечеткого вывода является лингвистическое значение искомой переменной. Далее по функции принадлежности необходимо найти ее численное значение (для ПИД-регулятора – конкретные значения его параметров). Разработаны многочисленные компьютерные методы автоматического выполнения нечетких выводов, фазификации и дефазификации переменных, с которыми можно ознакомиться в специальной литературе. Операции с нечеткими множествами возможно реализовать и на универсальных компьютерах. Однако в современных системах управления все шире используются специальные аппаратные средства – нечеткие компьютеры и нечеткие контроллеры (ЭВМ шестого поколения). В состав таких компьютеров входят следующие обязательные блоки: – блоки, реализующие функции нечеткой логической суммы и произведения, на основе которых можно построить более сложные операционные устройства; – устройства нечеткой памяти, технологически выполненные на отдельном кристалле; – машина нечетких выводов (производительность японского цифрового нечеткого процессора FC110 составляет 28000 логических правил в 1с); – блок дефазификации; – устройства ввода/вывода информации. Анализ современных тенденций развития теории и техники управления показывает, что нечеткие контроллеры являются одним из наиболее перспективных устройств управления для сложных технических (в частности, мехатронных) систем. Мы рассмотрели применение нечеткого контроллера на низшем – исполнительном уровне управления. Но тем более данный подход эффективен для высших уровней управления, где требуется принимать решения и планировать движение системы в условиях неопределенной информации о внешней среде и объектах работ.
|
||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-02-09; просмотров: 596; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.15.226.248 (0.015 с.) |
 (4.3)
(4.3)
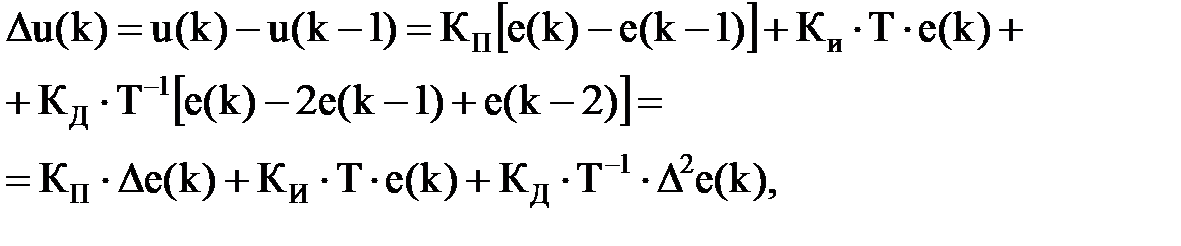 (4.4)
(4.4) – конечные разности соответственно 1-го и 2-го порядков дискретного сигнала ошибки.
– конечные разности соответственно 1-го и 2-го порядков дискретного сигнала ошибки.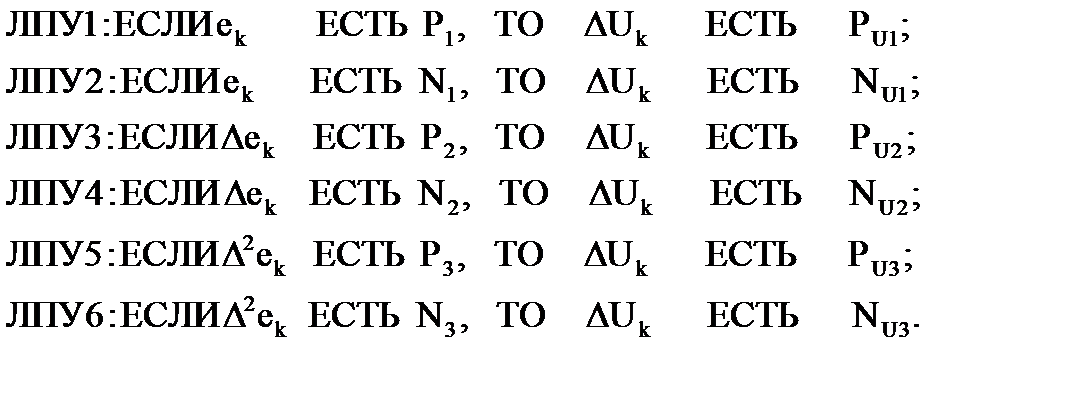 (4.5)
(4.5)