
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Определение передаточной функции объекта управленияСтр 1 из 4Следующая ⇒
КУРСОВОЙ ПРОЕКТ
по дисциплине: “ Теория автоматического управления ”
Тема: «Синтез АСР давления пара на выходе ректификационной колонны»
Выполнил студент ______3__________ курса ___________________ Маринин А.Е.________ Институт ___________ СА и И _____________ Специальность_______ 220301 _____________ Форма обучения______ ДФО ______________ Шифр ______________ 000636 _____________ Проверил:__________ Шиянова Н.И.________ Оценка: ________________________________
Мелеуз 2010 год Содержание Введение………………………………………………………………………….5 1 Описание объекта управления…………………………………………………..6 2 Построение экспериментальной переходной функции объекта управления………………………………………………………………………10 2.1 Определение передаточной функции объекта управления……………...11 2.2 Определение параметров передаточной функции……………………….13 3 Идентификация переходной функции объекта управления…………………..15 3.1 Построение расчетной переходной функции объекта управления……..16 3.2 Проверка математической модели на адекватность……………………..18 3.2.1 Проверка математической модели на адекватность по критерию Стьюдента……………………………...…………………………….....19 3.2.2 Проверка математической модели на адекватность по критерию Фишера……………...…………………………………………………...20 4 Выбор закона регулирования и типа регулятора………………………………21 4.1 Расчеты параметров настройки ПИ - регулятора с учетом типового процесса регулирования…………………………………………………..23 4.2 Расчеты параметров настройки ПИД - регулятора с учетом типового процесса регулирования…………………………………………………..25 5 Синтез замкнутой САР………………………………………………………….26 6 Анализ устойчивости САР по критерию Найквиста…………………………..29 6.1 Синтез разомкнутой САР с ПИ-регулятором…………………………….30 6.2. Синтез разомкнутой САР с ПИД-регулятором…………………………..31 6.3. Оценка устойчивости САР………………………………………………...31 6.3.1 Запас устойчивости по амплитуде и по фазе системы с ПИ – регулятором…………………………………………………………...31 6.3.2 Запас устойчивости по амплитуде и фазе системы с ПИД – регулятором…………………………………………………………..32
7 Определение показателей качества управления замкнутой САР……………34
7.1 Построение переходной функции замкнутой САР с ПИ-регулятором по ее передаточной функции………………………..………..………………3 7.2 Расчет показателей качества управления замкнутой САР с ПИ-регулятором……………………………………………………………………..38 7.3 Построение переходной функции замкнутой САР с ПИД-регулятором по ее передаточной функции……………………………..38 7.4Расчет показателей качества управления замкнутой САР с ПИД -регулятором………………………………………………………………..39 Вывод……………………………………………………………………………40 Заключение……………………………………………………………………...41 Список использованных источников………………………………………….42
Автоматизация производственных процессов является одним из ведущих направлений технического прогресса, важным фактором повышения эффективности и производительности труда, а также повышения качества выпускаемой продукции во всех сферах производства. При всем многообразии автоматических устройств и автоматизированных систем управления и путей автоматизации процессов в различных отраслях промышленности имеются общие теоретические положения, являвшиеся фундаментальным базисом теории автоматического управления. Теория автоматического управления – наука о методах определения этих законов для объектов, допускающих их реализацию средствами автоматики. Разновидность автоматического управления представляет собой автоматическое регулирование, т.е. поддержание постоянными каких-либо величин, характеризующих процесс, или изменение этих величин по определённым законам. В теории автоматического регулирования основными являются проблемы: устойчивости, качества переходных процессов, статической и динамической точности, автоколебаний, оптимизации, синтеза и отождествления (идентификации). Задачи общей теории автоматического регулирования заключаются в решении вышеперечисленных проблем. При поиске решений используются: 1 Методы анализа устойчивости замкнутых САР. 2 Методы оценки качественных показателей САР. 3 Методы повышения точности САР. 4 Методы коррекции динамических свойств САР.
5 Методы синтеза САР. Разработка методов решения прикладных инженерных задач, стоящих при проектировании САР есть глобальная цель теории систем автоматического регулирования.
Общая задача управления технологическим процессом – это минимизация (максимизация) некоторого критерия (себестоимость, затраты энергии и т.д.) при выполнении ограничений на технологические параметры, накладываемых регламентом. Решение этой задачи для всего процесса в целом затруднительно (много влияющих факторов), весь технологический процесс следует разбить на отдельные участки, причем обычно участок соответствует законченной технологической операции, имеющей свою подзадачу, например, обработка молока. Технологические процессы одного типа (например, процессы нагрева) могут отличаться исполнением аппаратуры, физико – химические свойствами участвующих в них потоков сырья и т.д. Однако они все протекают по одним и тем же законам и подчиняются общим закономерностям. Характер этих закономерностей в первую очередь определяется тем, какой параметр участвует в управлении. К числу типовых технологических параметров, подлежащих контролю и регулированию, относят расход, уровень, давление, температуру и ряд показателей качества. Регулирование расхода. Системы регулирования расхода характеризуются малой инерционностью и частотой пульсации параметра. Обычно управление расходом – это дросселирование потока вещества с помощью клапана или шибера; изменение напора в трубопроводе за счет изменения частоты вращения привода насоса или степени байнапсирования (отведения части потока через дополнительные каналы). Выбор закона регулирования зависит от требуемого качества стабилизации параметра. Регулирования уровня. Системы регулирования уровня имеют те же особенности, что и системы регулирования расхода. Постоянство уровня свидетельствует о равенстве количеств подаваемой и расходуемой жидкости. Это условие может быть обеспечено воздействием на подачу или расход Регулирование давления. Постоянство давления, как и постоянство уровня, свидетельствует о материальном балансе объекта. Способы регулирования давления аналогичны способам регулирования уровня. Регулирование температуры. Температура – показатель термодинамиче- ского состояния системы. Динамические характеристики системы регулирования температуры зависят от физико – химических параметров процесса и конструкции аппарата. Особенность такой системы – значительная инерционность объекта и нередко измерительного преобразователя. Выбор закона регулирования зависит от инерционности объекта: чем она больше, тем закон регулирования сложнее. Постоянная времени измерительного преобразователя может быть снижена за счет увеличения скорости движения теплоносителя, уменьшения толщины стенок защитного чехла (гильзы) и т.д. Регулирование состава или качества продукта. При регулировании состава или качества продукта возможна ситуация, когда параметр (например, влажность зерна) измеряют дискретно. В этой ситуации неизбежны потеря информации снижение точности динамического процесса регулирования. В этом случае рекомендуется стабилизировать некоторый промежуточный параметр y(t), значение которого зависит от основного регулируемого параметра – показателя качества продукта y(ti).
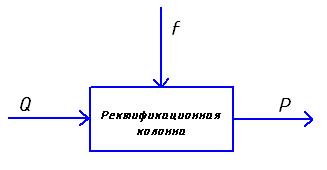
Объект управления реализует процесс, который необходимо организовать для достижений поставленных целей. В теории управления объект рассматривается как преобразователь переменных входа u (t), f(t) в переменную выхода y(t), как это показано на рисунке 1.1.
Рисунок 1.1 - Структурная схема объекта управления
Цель управления, в первую очередь, определяет ограничения на переменную выхода объекта y(t). Неконтролируемые воздействия среды f(t), называемые возмущениями, вызывают нежелательные отклонения выхода объекта. Для уменьшения этих отклонений на объект оказывают соответствующие управляющие воздействия u(t). Теория управления изучает общие закономерности, присущие системам управления, независимо от их природы. Объекты управления могут быть техническими, экономическими, биологическими, социальными, военными и др.
Рисунок 1.2 - Структурная схема объекта управления данной курсовой работы
где Q – расход вещества; f – температура окружающей среды; P – давление пара на выходе.
Типа регулятора
Таким образом, встает задача выбора закона регулирования. Закон регулирования — это математическая зависимость, с помощью которого определяется регулирующее воздействие по сигналу рассогласования.
П - регуляторы осуществляют закон регулирования, в котором регулирующий орган перемещается пропорционально отклонению регулируемого параметра:
Скорость перемещения регулирующего органа пропорциональна отклонению регулируемого параметра:
где k — коэффициент передачи регулятора. Таким образом, П - регулятор имеет один параметр настройки k. ПИ - регуляторы осуществляют закон регулирования, в котором регулирующий орган перемещается пропорционально отклонению и интегралу отклонения регулируемого параметра:
Скорость перемещения регулирующего органа пропорциональна отклонению, скорости отклонения и ускорению отклонения регулируемого параметра:
Tu - время изодрома; Тп - время предварения. Таким образом, ПИ - регулятор имеет два параметра настройки: k, Тu и Тп. При выборе типа регулятора рекомендуется ориентироваться на величину отношения запаздывания к постоянной времени в объекте τ/Т. Если τ/Т <0,2, то можно выбрать релейный, непрерывный или цифровой регуляторы. Если 0,2< τ/Т <1, то должен быть выбран непрерывный или цифровой, ПИ - или ПИД - регулятор. Если τ/Т > 1, то выбирают специальный цифровой регулятор с упредителем, который компенсирует запаздывание в контуре управления. Однако этот же регулятор рекомендуется применять и при меньших отношениях τ/Т. Для нашего объекта отношение τ/Т =0,1/1,9=0,05, следовательно можно выбрать ПИ - или ПИД - регулятор. Рассчитаем параметры настройки ПИ - и ПИД - регуляторов, и сравнив показатели качества регулирования, выберем оптимальный. Анализ устойчивости САР По критерию Найквиста
Система регулирования, устойчивая в разомкнутом состоянии, будет устойчива и в замкнутом состоянии, если годограф амплитудно - фазовой частотной характеристики разомкнутой системы не охватывает точку с координатами (-1,i0). Для применения частотного критерия устойчивости Найквиста необходимо знать, устойчива или неустойчива система в разомкнутом состоянии. При этом если система в разомкнутом состоянии неустойчива, то следует определить количество корней её характеристического уравнения, имеющих положительные вещественные части. Только в этом случае можно применить частотный критерий устойчивости Найквиста к исследованию устойчивости замкнутой системы.
Оценка устойчивости САР Управления замкнутой САР
Различают 4 группы критериев качества регулирования: – критерии точности - используют величину ошибки в различных типовых режимах; – критерии величины запаса устойчивости - оценивают удаленность САР от границы устойчивости; – критерии быстродействия - оценивают быстроту реагирования САР на появление задающего и возмущающего воздействий; – интегральные критерии - оценивают обобщенные свойства САР: точность, запас устойчивости, быстродействие. Прямые оценки качества: 1 Установившееся значение выхода, определяющее статическую точность системы:
2 tp – время переходного процесса, определяющее быстродействие системы. Оно определяется из соотношения:
где ∆ - заданная малая величина, характеризующая точность системы. ∆ предварительно задается в процентах от установившегося значения hуст, где нет определенных требований – принимают ∆%=5%. 3
Обычно требования по перерегулированию составляют σ=10..30%, иногда к качеству процессов может быть предъявлено требование σ=0%, например в системах позиционирования манипуляторов промышленных роботов. 4 ω – частота колебаний.
где Т – период колебаний для колебательных процессов. 5 N – это число полных колебаний, которое имеет h(t) или e(t) за время регулирования tp. Этот параметр определяется как число выбросов. Обычные требования по числу колебаний N =1..2, в некоторых системах накладываются ограничение на колебательность N =0, например, в системах с существованием люфтом в механических передачах. 6 tm – время достижения первого максимума. 7 tk – время нарастания переходного процесса, время начала переходного процесса до момента первого пересечения графиком линии установившегося значения.
Для построения в MathCad переходной функции объекта управления с целью определения показателей качества необходимо записать передаточную функцию замкнутой САР. В общем виде эта функция будет выглядеть следующим образом:
При нахождении переходной функции замкнутой системы в MathCad следует учитывать, что в знаменателе передаточной функции
Передаточная функция замкнутой САР уровня с ПИ-регулятором:
График переходной функции замкнутой АСР температуры с ПИ-регулятором показан на рисунке 7.1.
Рисунок 7.1 – Переходная функция замкнутой системы автоматического регулирования с ПИ-регулятором
КУРСОВОЙ ПРОЕКТ
по дисциплине: “ Теория автоматического управления ”
Тема: «Синтез АСР давления пара на выходе ректификационной колонны»
Выполнил студент ______3__________ курса ___________________ Маринин А.Е.________ Институт ___________ СА и И _____________ Специальность_______ 220301 _____________ Форма обучения______ ДФО ______________ Шифр ______________ 000636 _____________ Проверил:__________ Шиянова Н.И.________ Оценка: ________________________________
Мелеуз 2010 год Содержание Введение………………………………………………………………………….5 1 Описание объекта управления…………………………………………………..6 2 Построение экспериментальной переходной функции объекта управления………………………………………………………………………10 2.1 Определение передаточной функции объекта управления……………...11 2.2 Определение параметров передаточной функции……………………….13 3 Идентификация переходной функции объекта управления…………………..15 3.1 Построение расчетной переходной функции объекта управления……..16 3.2 Проверка математической модели на адекватность……………………..18 3.2.1 Проверка математической модели на адекватность по критерию Стьюдента……………………………...…………………………….....19 3.2.2 Проверка математической модели на адекватность по критерию Фишера……………...…………………………………………………...20 4 Выбор закона регулирования и типа регулятора………………………………21 4.1 Расчеты параметров настройки ПИ - регулятора с учетом типового процесса регулирования…………………………………………………..23 4.2 Расчеты параметров настройки ПИД - регулятора с учетом типового процесса регулирования…………………………………………………..25 5 Синтез замкнутой САР………………………………………………………….26 6 Анализ устойчивости САР по критерию Найквиста…………………………..29 6.1 Синтез разомкнутой САР с ПИ-регулятором…………………………….30 6.2. Синтез разомкнутой САР с ПИД-регулятором…………………………..31 6.3. Оценка устойчивости САР………………………………………………...31 6.3.1 Запас устойчивости по амплитуде и по фазе системы с ПИ – регулятором…………………………………………………………...31 6.3.2 Запас устойчивости по амплитуде и фазе системы с ПИД – регулятором…………………………………………………………..32
7 Определение показателей качества управления замкнутой САР……………34 7.1 Построение переходной функции замкнутой САР с ПИ-регулятором по ее передаточной функции………………………..………..………………3 7.2 Расчет показателей качества управления замкнутой САР с ПИ-регулятором……………………………………………………………………..38 7.3 Построение переходной функции замкнутой САР с ПИД-регулятором по ее передаточной функции……………………………..38 7.4Расчет показателей качества управления замкнутой САР с ПИД -регулятором………………………………………………………………..39 Вывод……………………………………………………………………………40 Заключение……………………………………………………………………...41 Список использованных источников………………………………………….42
Автоматизация производственных процессов является одним из ведущих направлений технического прогресса, важным фактором повышения эффективности и производительности труда, а также повышения качества выпускаемой продукции во всех сферах производства. При всем многообразии автоматических устройств и автоматизированных систем управления и путей автоматизации процессов в различных отраслях промышленности имеются общие теоретические положения, являвшиеся фундаментальным базисом теории автоматического управления. Теория автоматического управления – наука о методах определения этих законов для объектов, допускающих их реализацию средствами автоматики. Разновидность автоматического управления представляет собой автоматическое регулирование, т.е. поддержание постоянными каких-либо величин, характеризующих процесс, или изменение этих величин по определённым законам. В теории автоматического регулирования основными являются проблемы: устойчивости, качества переходных процессов, статической и динамической точности, автоколебаний, оптимизации, синтеза и отождествления (идентификации). Задачи общей теории автоматического регулирования заключаются в решении вышеперечисленных проблем. При поиске решений используются: 1 Методы анализа устойчивости замкнутых САР. 2 Методы оценки качественных показателей САР. 3 Методы повышения точности САР. 4 Методы коррекции динамических свойств САР. 5 Методы синтеза САР. Разработка методов решения прикладных инженерных задач, стоящих при проектировании САР есть глобальная цель теории систем автоматического регулирования.
Общая задача управления технологическим процессом – это минимизация (максимизация) некоторого критерия (себестоимость, затраты энергии и т.д.) при выполнении ограничений на технологические параметры, накладываемых регламентом. Решение этой задачи для всего процесса в целом затруднительно (много влияющих факторов), весь технологический процесс следует разбить на отдельные участки, причем обычно участок соответствует законченной технологической операции, имеющей свою подзадачу, например, обработка молока. Технологические процессы одного типа (например, процессы нагрева) могут отличаться исполнением аппаратуры, физико – химические свойствами участвующих в них потоков сырья и т.д. Однако они все протекают по одним и тем же законам и подчиняются общим закономерностям. Характер этих закономерностей в первую очередь определяется тем, какой параметр участвует в управлении. К числу типовых технологических параметров, подлежащих контролю и регулированию, относят расход, уровень, давление, температуру и ряд показателей качества. Регулирование расхода. Системы регулирования расхода характеризуются малой инерционностью и частотой пульсации параметра. Обычно управление расходом – это дросселирование потока вещества с помощью клапана или шибера; изменение напора в трубопроводе за счет изменения частоты вращения привода насоса или степени байнапсирования (отведения части потока через дополнительные каналы). Выбор закона регулирования зависит от требуемого качества стабилизации параметра. Регулирования уровня. Системы регулирования уровня имеют те же особенности, что и системы регулирования расхода. Постоянство уровня свидетельствует о равенстве количеств подаваемой и расходуемой жидкости. Это условие может быть обеспечено воздействием на подачу или расход Регулирование давления. Постоянство давления, как и постоянство уровня, свидетельствует о материальном балансе объекта. Способы регулирования давления аналогичны способам регулирования уровня. Регулирование температуры. Температура – показатель термодинамиче- ского состояния системы. Динамические характеристики системы регулирования температуры зависят от физико – химических параметров процесса и конструкции аппарата. Особенность такой системы – значительная инерционность объекта и нередко измерительного преобразователя. Выбор закона регулирования зависит от инерционности объекта: чем она больше, тем закон регулирования сложнее. Постоянная времени измерительного преобразователя может быть снижена за счет увеличения скорости движения теплоносителя, уменьшения толщины стенок защитного чехла (гильзы) и т.д. Регулирование состава или качества продукта. При регулировании состава или качества продукта возможна ситуация, когда параметр (например, влажность зерна) измеряют дискретно. В этой ситуации неизбежны потеря информации снижение точности динамического процесса регулирования. В этом случае рекомендуется стабилизировать некоторый промежуточный параметр y(t), значение которого зависит от основного регулируемого параметра – показателя качества продукта y(ti). Объект управления реализует процесс, который необходимо организовать для достижений поставленных целей. В теории управления объект рассматривается как преобразователь переменных входа u (t), f(t) в переменную выхода y(t), как это показано на рисунке 1.1.
Рисунок 1.1 - Структурная схема объекта управления
Цель управления, в первую очередь, определяет ограничения на переменную выхода объекта y(t). Неконтролируемые воздействия среды f(t), называемые возмущениями, вызывают нежелательные отклонения выхода объекта. Для уменьшения этих отклонений на объект оказывают соответствующие управляющие воздействия u(t). Теория управления изучает общие закономерности, присущие системам управления, независимо от их природы. Объекты управления могут быть техническими, экономическими, биологическими, социальными, военными и др.
Рисунок 1.2 - Структурная схема объекта управления данной курсовой работы
где Q – расход вещества; f – температура окружающей среды; P – давление пара на выходе.
Определение передаточной функции объекта управления Проведение эксперимента начинают с установки на объекте выбранного режима работы, который характеризуется постоянством выходной переменной и всех влияющих на нее переменных. Установившийся режим работы при заранее выбранном значении выходной переменной хвых.0 выдерживают 2,0— 2,5 мин для медленно протекающих процессов, связанных, например, с изменением температуры или влажности, и 0,3—0,5 мин — для более быстро протекающих процессов, таких, например, как изменение давления или расхода. Затем как можно быстрее вводят испытательное воздействие и одновременно начинают регистрировать изменение выходной переменной во времени. Для дальнейшей оценки вида испытательного воздействия необходимо также определить время его внесения. Помимо регистрации выходной переменной в процессе эксперимента желательно, если это, возможно, записывать изменения основных возмущающих переменных и, в первую очередь, нагрузки объекта. Окончание переходного процесса определяется по значению выходной переменной. При экспериментальном определении переходной функции на объектах с самовыравниванием (p > 0) опыт считается законченным, если выходная переменная, начиная с некоторого момента времени, остается практически неизменной, а на объектах без самовыравнивания (p = 0) - если скорость изменения переменной достигает своего постоянного максимального значения. При снятии импульсных характеристик эксперимент прекращают, когда выходная переменная достигнет своего первоначального значения на объектах с самовыравниванием или перестанет изменяться на объектах без самовыравнивания.
Построим графики переходного процесса. Для этого на вход подается ступенчатое воздействие x(t) – расход вещества. На рисунке 2.1 представлен график скачкообразного воздействия на объект управления. Для построения графика использована программа MathCad.
x – изменение входной величины, м3/час; t – время, с. Рисунок 2.1- График скачкообразного изменения входного воздействия
По данным таблицы 1 строится экспериментальная переходная функция объекта управления у(t) в программе MathCad.
у – изменение выходной величины, Па; t – время, с. Рисунок 2.2 – Получение переходной функции объекта управления у(t).
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-02-09; просмотров: 320; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.138.141.202 (0.148 с.) |

 6
6 Введение
Введение 1 Описание объекта управления
1 Описание объекта управления жидкости. Выбор закона регулирования также зависит от требуемого качества
жидкости. Выбор закона регулирования также зависит от требуемого качества  стабилизации параметра. При этом возможно использование не только пропорциональных, но также и позиционных регуляторов.
стабилизации параметра. При этом возможно использование не только пропорциональных, но также и позиционных регуляторов.

 2 Построение экспериментальной переходной функции объекта управления
2 Построение экспериментальной переходной функции объекта управления
 Важнейшим с точки зрения теории управления свойством является самовыравнивание объекта. Если объект управления не обладает самовыравниванием, перед разработчиком стоит задача обеспечить поддержание заданного параметра в пределах диапазона, допускаемого технологическим регламентом. Однако если объект управления обладает самовыравниванием, нельзя забывать, что на него действуют неконтролируемые воздействия окружающей среды, называемые возмущениями, кроме того, иногда стабилизация параметра занимает значительное время, либо же за это время параметр хоть и стабилизируется, но приходит к недопустимому для конкретного процесса значению. В обоих случаях необходимо регулировать требуемый параметр для оптимального протекания технологического процесса.
Важнейшим с точки зрения теории управления свойством является самовыравнивание объекта. Если объект управления не обладает самовыравниванием, перед разработчиком стоит задача обеспечить поддержание заданного параметра в пределах диапазона, допускаемого технологическим регламентом. Однако если объект управления обладает самовыравниванием, нельзя забывать, что на него действуют неконтролируемые воздействия окружающей среды, называемые возмущениями, кроме того, иногда стабилизация параметра занимает значительное время, либо же за это время параметр хоть и стабилизируется, но приходит к недопустимому для конкретного процесса значению. В обоих случаях необходимо регулировать требуемый параметр для оптимального протекания технологического процесса. .
.
 ,
,

 ,
,
 где k - коэффициент передачи регулятора;
где k - коэффициент передачи регулятора;
 Устойчивость САР связана с характером её поведения после прекращения внешнего воздействия. С целью упрощения анализа устойчивости систем разработано ряд специальных методов, которые получили название критерии устойчивости. Критерии устойчивости делятся на две разновидности: алгебраические и частотные. Алгебраические критерии являются аналитическими, а частотные - графо-аналитическими. Критерии устойчивости позволяют также оценить влияние параметров системы на устойчивость. Рассмотрим критерий Найквиста, который позволяет по виду АФЧХ разомкнутой системы определить, является ли система устойчивой, и формулируется следующим образом:
Устойчивость САР связана с характером её поведения после прекращения внешнего воздействия. С целью упрощения анализа устойчивости систем разработано ряд специальных методов, которые получили название критерии устойчивости. Критерии устойчивости делятся на две разновидности: алгебраические и частотные. Алгебраические критерии являются аналитическими, а частотные - графо-аналитическими. Критерии устойчивости позволяют также оценить влияние параметров системы на устойчивость. Рассмотрим критерий Найквиста, который позволяет по виду АФЧХ разомкнутой системы определить, является ли система устойчивой, и формулируется следующим образом:
 .
.

 σ – перерегулирование – максимальное отклонение от установившегося значения, выраженное в относительных единицах или процентах.
σ – перерегулирование – максимальное отклонение от установившегося значения, выраженное в относительных единицах или процентах. .
.
 ,
,
 7.1 Построение переходной функции замкнутой САР с ПИ-регулятором по ее передаточной функции
7.1 Построение переходной функции замкнутой САР с ПИ-регулятором по ее передаточной функции .
.
 требует разложения в ряд Тейлора. Формула имеет вид:
требует разложения в ряд Тейлора. Формула имеет вид: .
.
 .
.



 h(t) – расход, м3/час; t – время, с.
h(t) – расход, м3/час; t – время, с. Экспериментальная характеристика рассматриваемого объекта управления, т.е. температуры в помещении представлена в таблице 1.
Экспериментальная характеристика рассматриваемого объекта управления, т.е. температуры в помещении представлена в таблице 1. Таблица 1 – Экспериментальные данные
Таблица 1 – Экспериментальные данные





