Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Комплексная автоматическая система удержания судна на заданной траектории (сузт).
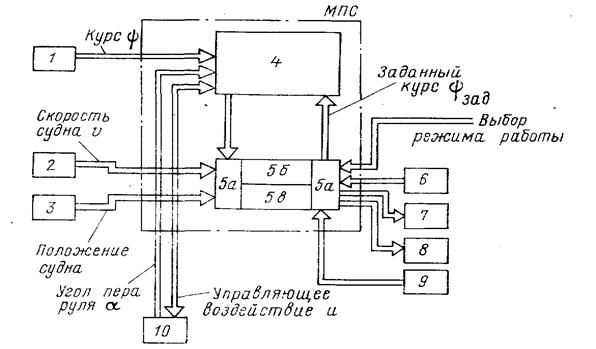
Для получения достоверной геофизической информации судно должно удерживаться на заданном положении относительно дна (линии профиля) с высокой точностью, несмотря на малую скорость движения (3—5 уз) и наличие буксируемых устройств значительной длины (до 3 км) с ограниченной механической прочностью. Фирмой «Анжутц» разработана комплексированная МС, обеспечивающая удержание судна на заданной траектории. На рис. 3.6 представлена структурная схема этой системы, в которую входят: гирокомпас 1; лаг 2; приборы навигационных комплексов, определяющих положение судна (два и более) 3; авторулевой 4; мини-ЭВМ 5 (5 а — интерфейс, 5 б — центральное запоминающее устройство, 5 в — центральный процессорный блок); считыватель перфоленты 6; графопостроитель 7; дисплей 8; клавиатура 9; рулевая машина 10. С помощью рассматриваемой системы можно автоматически вывести судно на запрограммированную траекторию, которая задается оператором с помощью клавиатуры, определяющей географические координаты точек поворота. В этой системе независимо от информации, поступающей от какой-либо одной группы приборов традиционного радионавигационного комплекса или устройств спутниковой связи, определяющей положение судна, вычисляются координаты вероятного положения судна по данным, выдаваемым гирокомпасом и лагом.
Рис. 3.6. Структурная схема комплексированной МС удержания судна на заданной траектории Управление курсом с помощью рассматриваемой системы осуществляется авторулевым, на вход которого поступает информация о величине заданного курса ψзад, формируемая мини-ЭВМ с учетом ошибки по положению судна. Система собрана в пульте управления. В верхней его части размещен дисплей с органами настройки оптимального изображения. Ниже, на наклонном поле пульта, расположен авторулевой с рукоятками управления. На горизонтальном поле пульта находится клавиатура, при помощи которой осуществляется ввод программ в мини-ЭВМ. Здесь же размещен переключатель, с помощью которого производится выбор режима управления. В цокольной части пульта расположены мини-ЭВМ и интерфейс. Вся периферийная аппаратура размещается на специальных подставках или других пультах. Рассматриваемая система может работать в трех режимах: «Курс», «Монитор» и «Программа». В режиме «Курс» осуществляется удержание заданного курса с помощью авторулевого по показаниям гирокомпаса. Режим «Монитор» выбирается тогда, когда готовится переход на режим «Программа», когда этот режим прерывается или когда переход по данному режиму закончен. На режим «Курс» переходят, когда обнаруживаются неисправности мини-ЭВМ, источников питания или радионавигационного комплекса. В этом режиме авторулевой работает независимо от мини-ЭВМ. В режиме «Программа» происходит управление курсом по данным радионавигационных приборов (датчиков положения) или гирокомпаса.
Обслуживание системы удержания судна на ЗТ осуществляется оператором с пульта. Выбор группы датчиков для определения положения судна производится оператором по рекомендациям, представленным на экране дисплея. В нижней части экрана приводится список всех разрешенных для данного режима команд, которые могут вводиться с помощью клавиатуры. Случайное нажатие какой-либо запрещенной клавиши блокируется ЭВМ. Применение МС в воздушном транспорте. Дистанционно пилотируемые летательные аппараты (ДПЛА). Схема доплеровской навигационной системы. Авиационная техника. Успехи, достигнутые в развитии авиационной и космической техники с одной стороны и необходимость снижения стоимости целевых операций с другой, стимулировали разработки нового вида техники – дистанционно пилотируемых летательных аппаратов (ДПЛА). На рис. 3.6 представлена структурная схема системы дистанционного управления полетом ДПЛА - HIMAT. Основной компонентой системы дистанционного пилотирования HIMAT является наземный пункт дистанционного управления. Параметры полета ДПЛА поступают в наземный пункт по линии радиосвязи от летательного аппарата, принимаются и декодируются станцией обработки телеметрии и передаются в наземную часть вычислительной системы, а также на приборы индикации информации в наземном пункте управления. Кроме этого, с борта ДПЛА поступает отображаемая с помощью телевизионной камеры картина внешнего обзора. Телевизионное изображение, высвечиваемое на экране наземного рабочего места человека-оператора, используется для управления летательным аппаратом при воздушных маневрах, заходе на посадку и при самой посадке. Кабина наземного пункта дистанционного управления (рабочее место оператора) оборудована приборами, обеспечивающими индикацию информации о полете и состоянии аппаратуры комплекса ДПЛА, а также средствами для управления летательным аппаратом. В частности, в распоряжении человека-оператора имеются ручки и педали управления летательным аппаратом по крену и тангажу, а также ручка управления двигателем. При выходе из строя основной системы управления подача команд системы управления происходит посредством специального пульта дискретных команд оператора ДПЛА.
Рис. 3.6 Система дистанционного пилоторования ДПЛА HIMAT: 1- носитель В-52; 2 – резервная система управления на самолете TF-104G; 3 – линия телеметрической связи с землей; 4 - ДПЛА HIMAT; 5 – линии телеметрической связи с ДПЛА; 5 – наземный пункт дистационного пилотирования В качестве автономной навигационной системы, обеспечивающей счисление пути, используются доплеровские измерители путевой скорости и угла сноса (ДПСС). Такая навигационная система используется совместно с курсовой системой, измеряющей курс датчиком вертикали, формирующим сигналы крена и тангажа, и бортовой ЭВМ, реализующей алгоритм счисления пути. В совокупности эти устройства образуют доплеровскую навигационную систему (см. рис. 3.7). Что бы повысить надежность и точность измерения текущих координат летательного аппарата, ДИСС может объединяться с измерителями скорости.
Рис. 3.7 Схема доплеровской навигационной системы
|
||||||
|
|
Последнее изменение этой страницы: 2017-02-09; просмотров: 351; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.117.70.132 (0.006 с.) |