Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Динамические характеристики элементов
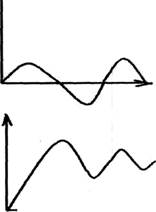
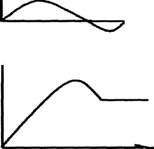
Изменения регулируемой величины во времени в результате того или На рисунках представлены кривые переходных процессов вызванное как возмущением (А и Б, В, Г), так и изменением задания регулятору (Д и Е).
Пик выше пунктирной линии (точки задания) называется перерегулирование, на 20% выше задания (не больше). График А - апериодически сходящиеся. Допустим, если Хмах < Хмах допустимого. График Б - затухающий колебательный. Допустим: tp < tp допустимого. График В - не затухающий колебательный. Допустим с малой амплитудой. График Г расходящийся колебательный. Может быть допустим в системах автоматического регулирования (САР). График Д - апериодически в результате управляющего воздействия. График Е - колебательный в результате управления воздействия. При изменении задания, отклонения отсчитывается от нового установившегося значения, т.е. от оси абсцисс переносится в другую точку.
Если система в результате управляющего воздействия приходит к равновесному состоянию, то она называется устойчивой (А, Б - графики). В случае если регулируемая величина либо удаляется от значения заданного, либо совершает не затухающих колебаний - система не устойчива. К САР представляются следующие требования: 1) Устойчивость; 2) Качество переходного процесса (минимальная статическая ошибка, minXmax, min tp) Чем качественней система, тем она сложнее в реализации, поэтому при расчетах идут на компромисс между стремлением получить наиболее высокое качество регулирования и достичь решения задачи, возможно более простыми техническими средствами Динамические свойства линейных элементов, а так же САР, часто описываются неоднородными, линейными, дифференциальными уравнениями. Общий вид этих НЛДУ:
Динамические свойства не линейных элементов и систем описываются дифференциальными уравнениями в частных производных и таких уравнений представляющих еще большие трудности. Поскольку большинство звеньев практически не линейные, для анализа их динамических свойств пользуются некоторыми искусственными приемами, заключающимися в следующем: 1) Не линейную характеристику; если это возможно подвергает линеаризации, т.е. криволинейный участок характеристики заменяют прямым. 2) Пользуясь преобразованием Лапласа сводят решение системы в сложным дифференциальных уравнений к системе алгебраических уравнений, решение которых не представляет трудностей.
|
||||||
|
|
Последнее изменение этой страницы: 2017-02-05; просмотров: 132; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.217.8.82 (0.003 с.) |