Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Пакет моделирования гибридных систем StateFlow⇐ ПредыдущаяСтр 31 из 31
В разделе 3.3. отмечалось, что особенность исследования динамики гибридных систем состоит в том, что фазовое пространство этих систем разбивается на области с различным поведением, при этом фазовая траектория в зависимости от происходящих событий переходит из одной области фазового пространства в другой. Еще недавно единственным способом изучения гибридных систем было исследование их отдельных фаз или режимов и «склеивание» общего поведения вручную. В настоящее время появились пакеты, позволяющие моделировать глобальное поведение таких объектов [7,18]. Одним из эффективных и наиболее доступных инструментов численного моделирования систем, управляемых событиями, является пакет Stateflow, входящий в состав среды MathLab. Stateflow используется вместе с пакетом Simulink и позволяет моделировать сложные событийно-управляемые системы, основываясь на теории конечного автомата. При этом MATLAB обеспечивает доступ к данным, программированию высокого уровня и инструментальным средствам визуализации; Simulink поддерживает моделирование непрерывных и дискретных динамических систем в среде графических блок-схем; диаграммы Stateflow расширяют возможности Simulink по моделированию сложных, управляемыми событиями систем. Традиционной формой представления конечного автомата является таблица истинности, описывающая логику поведения системы [Карпов]. Однако с точки зрения визуального моделирования более удобным подходом к проектированию управляемых событиями систем является его описание в терминах переходов между состояниями. На этом подходе основано построение графических представлений – диаграмм переходов. Диаграмма Stateflow (SF-диаграмма) в нотации обозначений конечного автомата, предложенной Дэвидом Харелом [7,19] – графическое представление конечного автомата, где состояния и переходы формируют базовые конструктивные блоки системы. Графический интерфейс пакета Stateflow позволяет создавать SF-диаграммы динамического типа. Это означает, что в ходе моделирования на SF-диаграмме отражаются все изменения модели: например, показывается, какие переходы реализуются и по каким условиям, изменяются цвета блоков в зависимости от их активности и т. п. Это дает возможность визуально отслеживать поведение системы в ходе моделирования, существенно повышая степень наглядности. Комбинация MATLAB-Simulink-Stateflow является мощным универсальным инструментом моделирования систем, управляемых событиями.
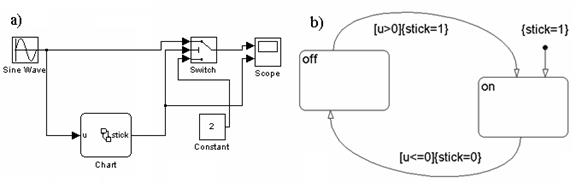
Обычно, при моделировании мехатронных систем, SF-диаграмма встроена в Simulink-модель и работает совместно с ней, обмениваясь сигналами (данные, события) через интерфейс. На рис. 5.7. показана схема, в которой источник переменного напряжения подключен к нагрузке – осциллографу через управляемый коммутатор. Переключатель должен работать следующим образом. При положительном напряжении на выходе генератора, он должен подключать это напряжение на вход индикатора. Если напряжение становится меньше нуля, на индикатор должен передаваться сигнал, равный 2. Управление осуществляется SF-диаграммой в функции состояния сигнала источника. На вход диаграммы поступает сигнал от генератора
Рис. 5.7. Система управления коммутатором: a – блок-схема модели, b – SF-диаграмма
Список литературы
1. Арайс Е.А., Дмитриев В.М. Автоматизация моделирования многосвязных механических систем. – М.: Машиностроение, 1987. – 240 с. 2. Бусленко Н.П. Моделирование сложных систем. – М.: Главная редакция физико-математической литературы, 1978. 3. Введение в математическое моделирование: Учебное пособие / В. Н. Ашихмин и др. Под ред. П.В.Трусова. – М.: "Интермет Инжиниринг", 2000. – 336с. 4. Веников В.А., Веников Т.В. Теория подобия и моделирования. – М.: Высшая школа, 1998. 5. Виллемс Ян К. От временного ряда к линейной системе //Теория систем. Математические методы и моделирование. – М.: Мир, 1989. 6. Гончаров В.И., Петерс Д.П., Вадутова Ф.А. Проектирование исполнительных систем роботов. – Томск: Изд-во ТПУ. – 96 с.
7. Дьяконов В.П. MATLAB 6/6.1/6.5 + SIMULINK 4/5 в математике и моделировании. Полное руководство пользователя. М.: СОЛОН-Пресс. – 2003. – 576 с. 8. Дьяконов В.П. SIMULINK 4. Специальный справочник. - Санкт-Петербург, 2002, - 518 с. 9. Заде Л. А., Дезоер Ч. А. Теория линейных систем; Метод пространства состояний: Пер. с англ. / Под ред. Г. С. Поспелова. — М.: Наука, 1970. — 703 с. 10. Имаев Д.Ч. и др. Анализ и синтез систем управления. – Информ. издат. центр Сургутского гос. универс., 1998. – 169с. 11. Карпов Ю.Г. Теория автоматов. – СПб.: Питер, 2002. – 224 с. 12. Клиначёв Н.В. «Моделирование систем в программе VisSim: Справочная система», 2003. 13. Клиначёв Н.В. Введение в дисциплину «Основы моделирования систем» http://model.exponenta.ru/lectures/sml_01.htm 14. Клиначёв Н.В. Введение в технологию моделирования на основе направленных графов. - Челябинск, 2003. – Website: http://www.vissim.nm.ru/lectures/sml_02.htm. 15. Клиначёв Н.В. Введение в технологию мультидоменного физического моделирования с применением ненаправленных графов. - Челябинск, 2003. – Website: http://www.vissim.nm.ru/lectures/sml_03.htm. 16. Клиначев Н.В. Обзор архитектурного построения программ математического моделирования динамических систем. http://www.exponenta.ru/educat/news/klinachev 17. Козлов О.С., Кондаков Д.Е., Скворцов Л.М. и др. Программный комплекс для исследования динамики и проектирования технических систем // Информационные технологии. 2005. № 9. 18. Козлов О.С., Кондаков Д.Е., Скворцов Л.М. и др. Программный комплекс «Моделирование в технических устройствах». Статья на сайте model.exponenta/ru. 19. Колесов Ю.Б., Сениченков Ю.Б. Имитационное моделирование сложных динамических систем/ http://www.exponenta.ru/soft/others/mvs/ds_sim.asp 20. Колесов Ю.Б., Сениченков Ю.Б. Компьютерное моделирование в научных исследованиях и образовании // Exponenta Pro. Математика в приложениях. – № 1. – 2003. – С. 4 –11. 21. Колесов Ю.Б., Сениченков Ю.Б. Моделирование систем. Динамические и гибридные системы. /Учебное пособие. – СПб.: БХВ-Петербург, 2006. – 224 с. 22. Норенков И.П., Трудоношнн В.А., Федорук В.Г. Математическое моделирование объектов мехатроники./ Электронный журнал Наука и образование №3 Март 2005 http://www.techno.edu.ru:16001/db/msg/25272.html 23. Ортега Д, Пул Н. Введение в численные методы решения дифференциальных уравнений. / Пер.с англ.; М.: Наука, 1986. 24. Применение метода графов связей в технике / Под ред. Кэрнопа Д. и Розенберга Р. – М.: Мир, 1973. 25. Рогачев Г.Н. "Stateflow 5. Руководство пользователя". http://matlab.exponenta.ru/stateflow/book1 26. Сабинин Ю. А. Электромашинные устройства автоматики. – М.: Наука, 1988. 27. Скворцов Л.М. Явные адаптивные методы численного решения жестких систем // Математическое моделирование. 2000. – № 12. – С. 97-107. 28. Советов Б.Я., Яковлев С.А. Моделирование систем. – М.: Высшая школа, 1985. – 269 с. 29. Тарасик В.П. Математическое моделирование технических систем: Учебник для вузов. – Мн.: ДизайнПРО, 1997. – 640с. 30. Трудоношин В.А., Пивоваров Н.В. САПР. Математические модели технических объектов. – М.: Высшая школа, 1986. – 160 с. 31. Шалагинов А.В. Моделирование. // Курс лекций http://ermak.cs.nstu.ru/~shalag/tems/lect_6.html 32. Эйкхофф П. Основы идентификации систем управления. – М.: Мир, 1975.
|
||||||
|
|
Последнее изменение этой страницы: 2017-02-07; просмотров: 228; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.118.37.240 (0.01 с.) |
 . Выходом диаграммы является сигнал управления переключателем
. Выходом диаграммы является сигнал управления переключателем  . С точки зрения нотаций StateFlow сигналы
. С точки зрения нотаций StateFlow сигналы  переменной
переменной