
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Коэффициент передачи объекта определяют переходной характеристике ⇐ ПредыдущаяСтр 4 из 4
где уоб (¥) – изм. выход. вел. При достижении объектом нового установившегося значения. Чтобы найти параметры передаточной функции объектов без самовыравнивания, необходимо продолжить прямолинейный участок характеристики до пересечения с осью ординат (рис. 4). Запаздывание t = 0В. Условный коэффициент усиления объекта без самовыравнивания равен
Перед наладкой системы автоматики по полученным динамическим характеристикам необходимо выбрать тип регулятора. При выборе можно руководствоваться следующими соображениями. К объекту без самовыравнивания не должен подключаться И-регулятор, что обусловлено требованиями обеспечения устойчивости. К объектам с самовыравниванием может подключаться регулятор любого типа. В отсутствии значительных запаздываний при плавном изменении возмущения можно пользоваться И-регулятором. При необходимости получения небольших значений перерегулирования и плавном изменении возмущений можно применять П-регуляторы (если допускается статическая ошибка). При больших запаздываниях, но медленно изменяющихся возмущениях целесообразно пользоваться ПИ-регуляторами, а при резких частых возмущениях – ПИД-регуляторами. Наибольшее распространение в практике автоматизации получили ПИ-регуляторы, которые позволяют избавиться от статической ошибки и обеспечивают приемлемую динамику переходных процессов. Исходными данными для выбора закона регулирования являются: 1. динамические характеристики объекта (Коб); 2. отношение t / Тоб; 3. максимальная величина возмущения Zmax. 4. вид типового переходного процесса 5. допустимые значения динамической ошибки регулирования у1доп и времени регулирования t1доп. Подбор регулятора начинают с определения максимального динамического отклонения регулируемой величины у1 в замкнутой системе и сравнения его с допустимой динамической ошибкой регулирования у1доп. При этом должно соблюдаться условие у1 < у1доп (*)
Для устойчивых объектов значение у1 определяют по равенству
у1 = RдКобхв
где Rд – динамический коэффициент регулирования системы, хв – регулирующее воздействие, вызывающее такое же изменение регулируемой величины, как и Zmax. Коэффициент Rд характеризует степень воздействия регулятора на объект и определяется по равенству
Величину коэффициента Rд , при которой замкнутой системой автоматики обеспечивается заданного типового переходного процесса, находят по графикам, приведенным на рис. 5. По значению Rд, установленному для данного типа регулятора вычисляют значение у1 и сравнивают его с допустимым значением по условию (1).
При удовлетворении этого условия регулятор проверяют на время регулирования tр в соответствии с условием
tр< tрдоп, (2)
где tрдоп – допустимое время регулирования. Значение tр/t при которых в системе автоматики обеспечивается протекание заданного типового процесса, находятся по данным табл.1. Если П-регулятор или ПИ-регулятор не обеспечивают выполнения условий (1), (2), то аналогичным способом выполняют проверку ПИД-регулятора.
Определение параметров настройки регулятора
Оптимальные значения настроечных регуляторов для объектов, приведены в табл. 2. Для регуляторов с независимыми параметрами настройки значения времени интегрирования Ти и времени дифференцирования Тд определяются по равенствам
Контрольные вопросы 1. Идеальный закон И-регулятора; 2. Идеальный П-регулятор; 3. Идеальный ПИ-регулятор; 4. Идеальный ПИД-регулятор; 5. Реальные регуляторы, их отличия от идельных.
Список литературы 1. Клюев А.С. Автоматическое регулирование, Москва, В.Ш., 1986. 2. Глинков Г.М., Климовицкий М.Д. Теоретические основы автоматического управления металлургическими процессами, М., Металлургия., 1985.
Практическая работа №9 Тема: Определение передаточной функции сложной системы с перекрестными связями. Цель: Усвоение нахождения эквивалентной передаточной функции в сложной системе автоматики.
Ход работы По индивидуальному заданию необходимо найти эквивалентную передаточную функцию многоконтурной системы автоматики, используя правила переноса точек суммирования и точек съема сигнала. Для этого: 1. Упростить многоконтурную систему автоматики; 2. Найти эквивалентную передаточную функцию преобразованной системы автоматического управления в операторной форме Wэкв.(Р);
3. Перейти к эквивалентной частотной передаточной функции Wэкв.(jω); 4. Выделить действительную и мнимую части эквивалентной ЧПФ Wэкв.(jω); Теоретические положения Любая система автоматического регулирования должна иметь хотя бы одну обратную связь, служащую для сравнения действительного изменения регулируемой величины управляемого процесса с требуемым законом. Такая обратная связь называется главной обратной связью системы Кроме этого для улучшения работы системы вводятся также местные обратные связи. Нередко эти связи охватывают одни и те же элементы, входящие в систему автоматики, образуя многоконтурные системы автоматического регулирования с несколькими регулируемыми величинами управляемого процесса. Многоконтурные системы автоматического регулирования называются системами связанного регулирования, если величины управляемого процесса X1 и X2 имеют связь между собой как через объект регулирования так и помимо его. При получении передаточных функций сложных систем с различными перекрёстными связями удобно пользоваться правилами эквивалентного преобразования.
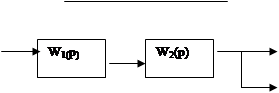
Правило переноса точки съема сигнала Если точка съема сигнала переноситься против направления прохождения сигнала, то в переносимую ветвь нужно включить элементы с передаточными функциями всех элементов встречающихся на пути между новой и прежней точками съема сигнала.
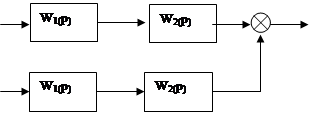
Y(t ) Y(t) Рисунок 1. Перенос точки съема сигнала против направления прохождения сигнала. Если точка съема сигнала переноситься по направлению прохождения сигнала, то в переносимую ветвь нужно включить элементы с обратными передаточными функциями всех элементов, встречающихся на пути между прежней и новой точками съема сигнала
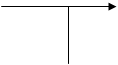
Рисунок 2. Перенос точки съема сигнала по направлению прохождения сигнала. Правило переноса точки суммирования сигналов Если точка суммирования переноситься против направления сигнала, то в переносимую ветвь включаются все элементы с их обратными передаточными функциями на пути между новой и старой точками суммирования
Z(t) Z(t) Рисунок 3. Перенос точки суммирования против направления сигнала.
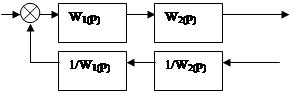
Если точка суммирования переноситься по направлению прохождения сигнала, то в переносимую ветвь нужно включить элементы с их передаточными функциями по пути между прежней и новой точками суммирования.
Z(t)
Рисунок 4. Перенос точки суммирования по направлению сигнала. Контрольные вопросы 1. Перенос точки съема сигнала по направлению передачи сигнала. 2. Перенос точки съема сигнала против направления передачи сигнала. 3. Перенос точки суммирования сигнала по направлению передачи сигнала 4. Перенос точки суммирования сигнала против направления передачи сигнала
Список литературы 1. Мельников В.И., Сурков А.Н. Теория автоматического регулирования и системы автоматики. М., Машиностроение, 1972 2. Глинков Г.М., Климовицкий М.Д. Теоретические основы автоматического управления металлургическими процессами, М., Металлургия 1985
Практическая работа №10 Тема: Определение устойчивости системы автоматики по критерию Гаусса-Гурвица. Цель: Усвоение определения устойчивости системы автоматики с помощью критерия Гаусса-Гурвица.
Ход работы По карточке индивидуального задания необходимо установить устойчивость системы автоматики при помощи критерия Гаусса-Гурвица. Для этого: 1) Найти эквивалентную передаточную функцию системы автоматики в операторной форме. 2) Выписать коэффициенты характеристическое уравнение. 3) Выписать коэффициенты характеристического уравнения и установить их знак. 4) Составить определитель Гурвица из коэффициентов характеристического уравнения и сосчитать величину этих определителей.1 5) Сделать вывод об устойчивости системы автоматики.
Теоретические положения Для анализа САР используют косвенные оценки-критерии, позволяющие ответить на главный вопрос –устойчива или неустойчива система, а также оценить качество переходного процесса без решения дифференциального уравнения.
Критерий устойчивости Гаусса-Гурвица Пусть характеристическое уравнение системы- это знаменатель передаточной функции САУ, имеет вид: аорn+а1рn-1+а2рn-2+…+аn=0 Система устойчива, если все коэффициенты характеристического уравнения n-степени положительны и определители начиная с Δ1 до Δn-1>0, где n –это степень характеристического уравнения. Главным определителем Гурвица составляется следующим образом. по главной диагонали записываются все коэффициенты характеристического уравнения в порядке возрастания индексов, начиная с а. Над каждым элементом главной диагонали определителя записывается коэффициенты в порядке убывания индексов. На местах коэффициентов с индексами меньше «0» и больше «n» ставятся нули.
а1 а3 а5 …0 ----- Δ= ао а2 а4 …0 ----------- 0 а1 а3 …0 --------------------- 0 0 0 …аn ---------------------------------
Определи Гурвица низших порядков показаны пунктиром.
Δ2 = а3 а2 = а1 а2 - ао а3
Δ3 = ао а2 а4 = а1 а2 а3 - а1 а4 – а3 ао=а3а2-а2а4 0 а1 а3
Пример: Характеристическое уравнение системы имеет вид: 0,01р2+0,17р2+0,8р+17=0 Определить устойчивость по критерию ГУРВИЦА. В соответствии с критерием ГУРВИЦА все коэффициенты характеристического уравнения положительны, Для системы ΙΙΙ порядка должно соблюдаться условие
а1а2 › аоа3 а1а2=1,17*0,8=0,136; аоа3=0,01*17=0,17 Следовательно система неустойчива.
Контрольные вопросы 1.Что такое передаточная функция САУ? 2.Как составляется главный определитель Гурвица? 3.Сформулировать понятие устойчивости системы автоматики. 4.Назвать виды передаточных функций для системы автоматики.
Список литературы 1.Мельников В.И., Сурков А.Н. Теория автоматического регулирования и системы автоматики. М., Машиностроение, 1972 2.Глинков Г.М., Климовицкий М.Д. Теоретические основы автоматического управления металлургическими процессами, М., Металлургия 1985
Практическая работа № 11 Тема: Определение устойчивости системы автоматики по критерию Михайлова. Цель: Усвоение определения устойчивости системы автоматики по частотному критерию Михайлова.
Ход работы По полученному индивидуальному заданию установить системы автоматики по частотному критерию Михайлова. Для этого: 1.Найти эквивалентную передаточную функцию системы автоматики в операторной форме; 2.Выписать характеристическое уравнение из Wэкв(p), перейти к его частотной форме; 3.Выделив действительную и мнимую части характеристического уравнения, рассчитать их значения для задаваемых значений угловой частоты от нуля до бесконечности. Результаты свести в таблицу 1 указанной формы:
Таблица 1.
4.На комплексной плоскости построить годограф Михайлова и определить устойчивость системы автоматики.
Теоретические положения Критерий устойчивости Михайлова А.В.Михайловы предложен частотный критерий, который также исходит из характеристического уравнения замкнутой системы. Этот критерий обладает большой наглядностью, т.к. является графическим. Пусть характеристическое уравнение замкнутой системы имеет вид: F(p)=аорn+а1pn–1a2pn–+...an Заменив в этом выражении р на jw, получается F(jw)=ао(jw)n+ а1+а2(jw)n–2+…+аn Представив F(jw) в виде суммы вещественной и мнимой частей: F(jw)= p(w)+jQ(w) Задавая значения w в пределах от 0 до ∞. Для каждого значения получается на комплексной плоскости вектор с координатами F(p) и, а соединив концы этих векторов плавной кривой, которая называется годографом МИХАЙЛОВА. По расположению этого годографа можно сделать вывод: устойчива или неустойчива система. Критерий МИХАЙЛОВА гласит: САР устойчива в том случае, если годограф МИХАЙЛОВА при изменении w от 0 до ∞ проходит последовательно против часовой стрелки n –квадратов комплексной плоскости, где n –степень характеристического уравнения.
p(w) p(w)
п=4 п=3 п=4 п=3
Годографы для устойчивых САР Годографы для неустойчивых САР Рисунок 1.
Пример: Исследовать на устойчивость МИХАЙЛОВУ систему, характеристическое уравнение которой имеет вид:
0,0014р4+0,022 р3+0,7 р2+1,6 р+5=0
Заменив р на jw 0,0014(jw)4+0,022(jw)3+0,7(jw)2+1,6(jw)+5=0,014w4-0,022jw3-0,7w2+1,6jw+5.
Отделим вещественную часть от мнимой, тогда p(w)=0,0014w4-0,7 w2+5; Q(w)=1,6w-0,022w3 Будем задавать значения w в пределах от 0 до Для каждого w получим координаты точек на комплексной плоскости Таблица 2.
Соединим полученные точки плавной кривой. Как видно из рисунка годограф Михайлова проходит последовательно против часовой стрелки ІY квадрата комплексной плоскости и уходит в этом квадрате в бесконечность. Следовательно, данная система устойчива.
w=1
w=10
Рисунок 2. Годограф характеристического уравнения.
Контрольные вопросы 1. Что такое годограф? 2. Для чего вводится понятие «оператор»? 3. Как выделить мнимую часть в уравнении? 4. Как выделить действительную часть в уравнении? Список литературы 1.Мельников В.И., Сурков А.Н. Теория автоматического регулирования и системы автоматики. М., Машиностроение, 1972 2.Глинков Г.М., Климовицкий М.Д. Теоретические основы автоматического управления металлургическими процессами, М., Металлургия 1985
Практическая работа №12 Тема: Определение устойчивости системы автоматики по критерию Найквиста. Цель: Усвоение определения устойчивости системы автоматики с помощью критерия Найквиста.
Ход работы По полученному индивидуальному заданию определить устойчивость замкнутой системы автоматики, используя критерий Найквиста. Для этого: 1. Условно разорвать звено обратной связи в заданной САУ; 2. Найти эквивалентную передаточную функцию разомкнутой системы автоматики в операторной форме; 3. Перейти к частотной передаточной функции разомкнутой САУ, заменив оператор «Р» частотным импульсом «jw»; 4. В эквивалентной частотной передаточной функции разомкнутой системы автоматики выделить действительную и мнимую части Р(w) и Q(w); 5. Построить годограф частотной передаточной функции разомкнутой САУ, задаваясь значениями угловой частоты «w» от нуля до бесконечности. Для этого составить таблицу формы:
Таблица 1.
6. Сделать вывод об устойчивости замкнутой системы автоматики по виду годографа ЧПФ разомкнутой системы автоматики.
Теоретические положения В 1932 году Найквист предложил критерий, позволяющий судить об устойчивости замкнутой системы автоматики по амплитудно-фазовой характеристике разомкнутой системы. Все системы автоматики замкнутые, т.е. существует связь между выходным и входным сигналами. С целью исследования такой системы на устойчивость по критерию Найквиста ее условно разрывают в звене обратной связи и получают разомкнутую систему.
Рисунок 1. К определению устойчивости САР по критерию Найквиста.
Критерий НАЙКВИСТА Если система автоматического регулирования устойчива в разомкнутом состоянии, то для ее устойчивости в замкнутом состоянии необходимо и достаточно, чтобы годограф амплитудно-фазовой характеристики разомкнутой системы при изменении w от 0до∞ не охватывал точку на комплексной плоскости с координатами Разомкнутая система устойчива в том случае, если она состоит из устойчивых звеньев: апериодических, колебательных и включает не более одного интегрирующего звена. Если разомкнутая система неустойчива, формулировка критерия более сложна (такую мы не приводим). В этом случае, а также при перекрестных обратных связях между звеньями системы, что затрудняет ее условное размыкание, рекомендуется применять другие критерии. ПРИМЕР1. Пусть структурная схема системы автоматического регулирования имеет вид (рис.2,а) w1(р)= w2(р)= w3(р)= Разомкнем эту систему в линии обратной связи, как показан на рис.2. Передаточная функция разомкнутой системы. Wраз(р)=
 Х Х
Рисунок 2. Структурная схема системы автоматики
P(w)
Рисунок 3. Амплитудно-фазовая характеристика разомкнутой системы.
Подставим числовые значения параметров Т1Т2Т3 =0,07*0,04*0,2=0,00056; Т1Т2+ Т1 Т3+ Т2Т3 =0,07*0,04+0,07*0,2+0,04*0,2=0,0248; (3) Т1+ Т2Т3 =0,07+0,04+0,2=0,31;
wраз(р) = Амплитудно-фазовая характеристика разомкнутой системы wраз(jw)=
Представим ее в виде суммы вещественной и мнимой части: wраз(jw)=
 Р(w)= Р(w)=  ; ;
Q(w)= Подставим в эти выражения несколько значений
Таблица 2. Результаты вычислений.
Исследуемая система состоит только из устойчивых звеньев и поэтому устойчива в замкнутом состоянии. Амплитудно-фазовая характеристика разомкнутой системы. показанная на рис.2.б., не охватывает точку с координатами (-1,;j0).Следовательно, эта система будет устойчивой и в замкнутом состоянии.
Контрольные вопросы 1. Какое звено называется апериодическим? 2. Какая обратная связь является положительной и какая – отрицательной? 3. Какая обратная связь является гибкой и разомкнутой системами автоматики.
Список литературы 1. Мельников В.И., Сурков А.Н. Теория автоматического регулирования и системы автоматики. М., Машиностроение, 1972 2. Глинков Г.М., Климовицкий М.Д. Теоретические основы автоматического управления металлургическими процессами, М., Металлургия 1985
Практическая работа №13
Тема: Определение качественных показателей системы автоматики по распределению корней характеристического уравнения. Цель: Усвоить корневые критерии качественных показателей работы системы автоматики.
Ход работы 1. Используя передаточную функцию для системы автоматики, полученную в практической работе №11 выписать из неё характеристическое уравнение. 2. Решить характеристическое уравнение т.е. найти все его корни. 3. На комплексной плоскости расположить все корни характеристического уравнения, указать корни, определяющие не устойчивость системы. 4. Из всех корней выделить корни, расположенные слева от мнимой оси. 5. Из выделенных корней установить область устойчивой работы системы автоматики. 6. Для устойчивой области системы найти показатели, а именно: - степень устойчивости; - угол максимального отклонения φ; - степень колебательности; - колебательность μ.
Теоретические положения Корневые критерии качества основаны на анализе распределения на комплексной площади корней характеристического уравнения системы. Корневые критерии применяют в основном для приближенной оценки качества переходных процессов систем низких порядков при всевозможных входных воздействиях. Характеристическое уравнение имеет вид: a0pn + a1pn-1 + a2pn-2 + …. +an =0. (1) Решение однородного дифференциального уравнения можно найти по формуле n y(t) = ∑ CiePi t (2) i=1 Ci – постоянные коэффициенты, определяемые параметрами системы Pi – корни характеристического уравнения i – порядковый номер n – степень характеристического уравнеыния.
Из формулы (2) видно, что: · если все корни характеристического уравнения действительные числа, то переходный процесс – экспоненциальный Pi = + ai · если корни характеристического уравнения комплексные числа, то переходный процесс – колебательный Pi = + ai + jω Из изложенного следует, что линейная система автоматики будет устайчива, если все вещественные корни характеристического уравнения и вещественные части комплексных корней будут отрицательными. Тогда для устойчивой системы автоматики все корни должны располагаться во втором и третьем квадрате комплексной плоскости, т.е. слева от оси ординат. По расположению этих корней можно судить о качественных показателях устойчивой системы автоматики. Такими показателями являются: - степень устойчивости; - колебательность системы; - быстрота затухания; - степень колебательности.
Степень устойчивости Степенью устойчивости называется абсолютная величина вещественной части корня, расположенного ближе всех к мнимой оси (a). Угол φ – образуется лучами, проведенными из начала координат через наиболее удаленные от оси абсцисс комплексные корни. m =ctg φ Чем меньше φ – тем меньше склонность системы к колебаниям. Чем больше a - тем большим запасом устойчивости обладает система автоматики. Колебательность - μ = Это отношение мнимой части ω, к действительной в той паре комплексных сопряженных корней, которые дают наибольший угол φ.
jω
w j О a a
Рисунок 1. Расположение корней характеристического уравнения на комплексной плоскости.
Чтобы система была устойчивой, корни её характеристического уравнения должны располагаться в области ограниченной лучами ОА и ОВ и прямой АВ.
Контрольные вопросы 1. Когда система будет устойчиво работать? 2. Показатели качества переходного процесса. 3. Виды кривых, характеризующих переходной процесс. 4. Показатели качества переходного процесса, полученные корневым методом.
Список литературы 1. Воронов А.А., Титов В.К., Новогранов Б.Н. Основы теории автоматического регулирования и управления, М., Высшая школа, 1977 2. Мельников В.И., Сурков А.Н., Теория автоматического регулирования и системы автоматики. М., Машиностроение, 1972
Практическая работа №14 Тема: Определение качества процесса регулирования частотными методами. Цель: 1. Изучить методику построения кривой переходного процесса для системы автоматики с использованием частотных характеристик. 2. Изучить порядок определения параметров переходного процесса для системы автоматики.
Ход работы 1. Используя результаты передаточной функции для системы автоматики из практической работы №12 определяется частотная передаточная функция для разомкнутой системы. 2. Из частотной передаточной функции разомкнутой системы автоматики выделяется вещественная(действительная) часть P(ω) –ВЧХ разомкнутой САУ. 3. Строиться график ВЧХ – P = f(ω) при изменении ω от 0 до ∞. 4. Апроксимируется кривая P = f(ω) на отдельные трапеции и для каждой из трапеций определяются параметры: Pi; ωni; ωci;x1 5. Используя таблицы h – функций составляются таблицы для построения кривых переходных процессов в следующие формы
Таблица 1.
ti = y1(t) = Pihti 6. Путем алгебраического суммирования ординат кривых переходных процессов определяется искомая кривая переходного процесса
7. По полученной кривой переходного процесса определять показатели переходного процесса а именно: - время переходного процесса- Т; - установившееся значение yуст.; - перерегулирование Δ - число колебаний n; установившуюся ошибку ε.
Теоретические положения Для определения прямых показателей процесса регулирования необходимо построить кривую переходного процесса. Приближенное построение кривой переходного процесса построено на однозначной связи между выходной величиной системы автоматики y(t) и частотной функцией P(ω), представляющей собой вещественную часть частотной передаточной функции для разомкнутой системы автоматики.
Wэкв.раз (j ω) = P(ω) + jQ(ω) Порядок построения кривой переходного процесса: - задаваясь значениями угловой частоты от 0 до
Таблица 2.
При скачкообразном изменении входной величины переходный процесс связан с ВЧХ связаны соотношением: y(t) = Чтобы получить уравнение переходного процесса необходимо в это соотношение подставить P(ω) и проинтегрировать. Но если степень уравнения P(ω) высокая это вычисление затруднительного, поэтому применяют приближенный графо-аналитический метод. Для этого используются метод Солодовникова В.В. Строят график P=f (ω), апроксимируют его отрезками горизонтальных и наклонных прямых для получения трапеций. Трапеции считаются положительными если они отображают площадь, охватывающую кривую P(ω) выше оси абсцисс, и отрицательными, если соответствуют площади, охватывающую кривую P(ω) ниже оси абсцисс, или площадями, излишне добавленными к положительным трапециям при разбивке.

|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-01-25; просмотров: 820; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.117.188.5 (0.304 с.) |


 (1)
(1) ; и
; и  ;
;
 Y(t)
Y(t)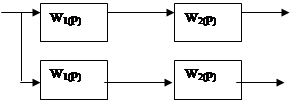 X(t) X(t)
X(t) X(t)
 X(t) Y(t) X(t) Y(t)
X(t) Y(t) X(t) Y(t)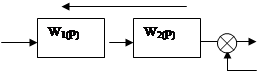
 Х(t) Y(t) X(t) Y(t)
Х(t) Y(t) X(t) Y(t)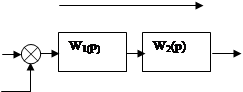
 X(t) Y(t) X(t) Y(t)
X(t) Y(t) X(t) Y(t) Главный определитель Гурвица имеет вид:
Главный определитель Гурвица имеет вид:
 Δ1=а1; а1 а3
Δ1=а1; а1 а3
 а1 а3 а5
а1 а3 а5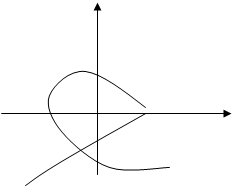
 п=2 Q(w) п=5 Q(w)
п=2 Q(w) п=5 Q(w)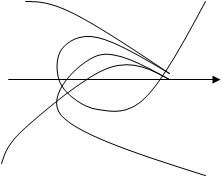

 Q(w)
Q(w)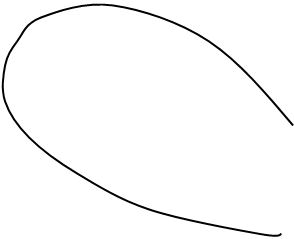 w=5
w=5 w=0 P(w)
w=0 P(w) Q (w)
Q (w)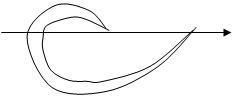
 P(w)
P(w)


 (рис.1.)
(рис.1.)
 =2; Т1=0,07с
=2; Т1=0,07с
 =
=  (2)
(2)




 место
место

 размык.
размык. Q(w)
Q(w)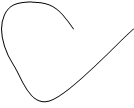
 -1 W=0
-1 W=0 =2*10*0,5=10,
=2*10*0,5=10, (4)
(4)
 (5)
(5) +
+  =
= 

 - коэффициент затухания колебаний, степень колебательности.
- коэффициент затухания колебаний, степень колебательности. = tg φ
= tg φ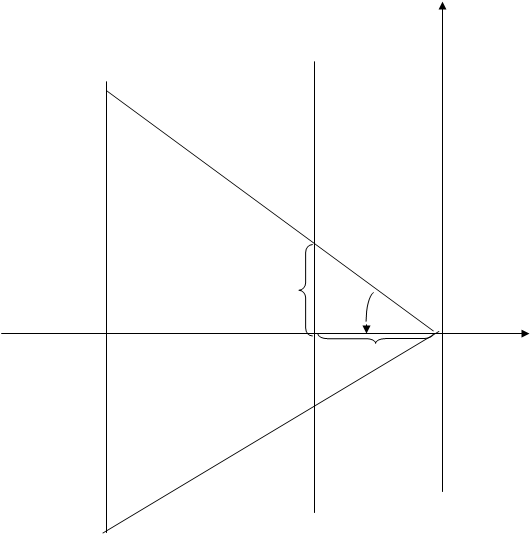
 ;
; y(t) =
y(t) =  yi(t)
yi(t)
 P(ω)
P(ω)  d ω
d ω


 P
P


