Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Разработка системы управления передвижением мостаСтр 1 из 9Следующая ⇒
Аннотация
В дипломном проекте приводится разработка электрических схем управления механизмами тележки и подъема лабораторного мостового крана, предназначенного для ознакомления студентов с современным оборудованием и средствами автоматизации. Дается описание функциональной схемы, обеспечивающей программный выход подъемного механизма в заданную точку, обосновывается выбор электропривода по системе ПЧ-АД и расчет механических характеристик при частотном регулировании. На основе расчета силовых элементов ПЧ производится выбор серийного преобразователя. Рассмотрены вопросы охраны труда и экономики.
Аңдатпа
Дипломдық жобада арба механизмдерін басқарудың электр сұлбалары мен студенттерге заманауи жабдықтар мен автоматтандыру құрылғыларымен таныстыруға арналған зертханалық көпірлі кранды көтерудің əзірленуі келтірілген. Белгіленген нүктедегі көтерілу механизмінің бағдарламалық шығуын қамтамасыз ететін функционалды сұлбаның жүйеленіп баяндалынуы беріліп, АҚ-ЖТ (ассинхронды қозғалтқыш жиілігінің түрлендірушісі) жүйесі бойынша электржетек таңдауы мен жиіліктік реттеу барысындағы механикалық сипаттамалардың есептелінуі өз орнын тапты. ЖТ күштік элементтерінің есептелінуі негізінде сериялық түрлендіргіш таңдауы жүргізілінеді. Еңбекті қорғау жəне экономика сұрақтары да қарастырылған. Annotation
Diploma project provides the development of electric charts of management, which is driven by the mechanisms of light cart, and rising of the laboratory-travelling crane intended for the acquaintance of students with a modern equipment and facilities of automation. There is given the description of functional diagram providing the programmatic exit of lifting mechanism in the set point, the choice of electromechanic by system of transformer of frequency of induction motor and calculation of mechanical descriptions are grounded at the frequency adjusting. On the basis of calculation of power elements transformer of frequency of the choice of serial transformer is produced. The questions of labour and economy protection are considered.
Содержание
Введение 9 1 Разработка системы управления передвижением моста 10 1.1 Основные требования к электроприводу моста и системы управления 10 1.2 Устройство лабораторного мостового крана. 11 2. Расчет механических характеристик частотно-регулируемого электропривода 21
2.1 Механическая характеристика при законе U/f=const (f1= 50 Гц) 21 2.2 Механическая характеристика при законе U/f=const (f1= 40 Гц) 26 2.3 Механическая характеристика при законе U/f=const (f1= 30 Гц) 28 2.4 Механическая характеристика при законе U/f=const (f1= 20 Гц) 29 2.5 Механические характеристики с сохранением постоянства перегрузочной способности 32 3. Расчет и выбор элементов силовой схемы 41 3.1 Расчет силовых элементов инвертора и выпрямителя 41 3.2 Выбор серийного преобразователя частоты 45 4. Моделирование системы ПЧ-АД. 50 4.1 Математическая модель системы ПЧ-АД 50 4.2 Виртуальная модель ПЧ- АД в программной среде Matlab 53 4.3 Осциллограммы процессов при пуске и набросе нагрузки 54 5 Безопасность жизнедеятельности труда 59 5.1 Анализ условий труда 59 5.2 Расчет шума 61 6 Экономическая часть 67 6.1 Расчет капитала вложений и эксплуатационных издержек 67 6.2 Расчет экономической эффективности 73 Заключение 74 Список используемой литературы 75 Введение
Мостовые краны являются одним из главных устройств цехов, предназначающиеся для перемещения грузов и оборудования в ходе производства. Электроприводы мостовых кранов в основном оборудованы нерегулируемым по частоте вращения асинхронным электродвигателем (управление релейно-контакторное). В последнее время возникла возможность оборудования мостовыми кранами все системы управления, позволяющие создать условия безопасного, удобного и более эффективного управления всем технологическим процессом. Это обусловлено развитием микропроцессорной техники. С этой целью могут быть использованы микроконтроллеры, панели оператора позволяющие отображать ход выполнения технологического процесса, программные реле. Нерегулируемые электропривода механизмов мостового крана оснащен на регулированными электроприводами по система ПЧ-АД, позволяющие осуществить плавный пуск и передвижение механизмов мостового крана. В то же время появилась возможность программного управления механизмами крана, с обеспечением выхода в заданную точку в автоматическом режиме. При этом взаимодействие между элементами системы управления и регулирования электроприводов осуществляется с применением интерфейсов связи RS-485 и др.
С целью обучения студентов современным технологиям в автоматизации в лаборатории кафедры ЭиАПУ реализована механическая часть мостового крана, содержащая механизм передвижения моста и тележки с подъемным механизмом. Установлены несущие балки, редуктора и двигатели. Необходимо провести расчет мощности двигателей для крана, и сравнить с уже установленными электродвигателями. Для обеспечения программированного выхода подъемных механизмов в заданную точку, на элементах конструкции мостового крана установлены датчики, контролирующие положения механизмов крана. В дипломном проекте ставиться задача разработки электрических схем управления электродвигателями моста, обеспечивающие их синхронизацию, разработка конструкции стенда и размещение необходимого оборудования с целью проведения учебных занятий. Анализ условий труда В данной части производится анализ оборудования и работы мостового крана. Используются три номинала напряжения 380, 220 вольт переменного тока и 24 постоянного. Все управляющие оборудование располагается за стендом. В лаборатории уже имеется рассчитанное заземление. Используется 4 электропривода. Лаборатория показана на рисунке 5.1. Как уже было отмечено ранее, используется два асинхронных двигателя с фазным ротором: тип ФТТ 0,4-0,16; мощность, Вт 180 число оборотов, об/мин 1400 Cos φ 0,88 КПД 0,92
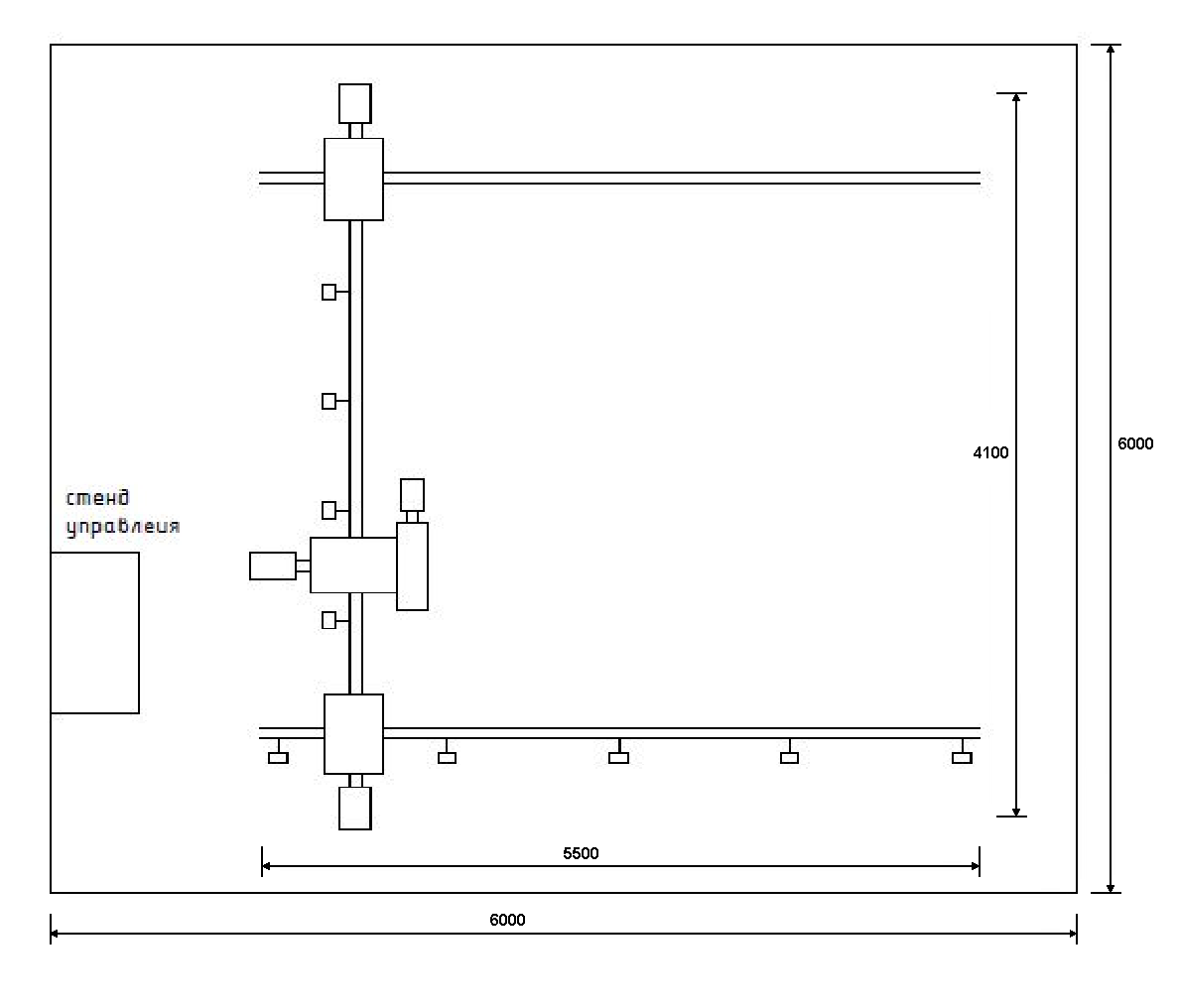
Рисунок 5.1 – Чертеж мостового крана вид сверху
Лабораторный кабинет имеет следующие габариты: высота 3,3 метра, длина и ширина по 6 метров. Мостовой кран является основной частью лабораторного стенда и всей дипломной работы. Мост имеет три степени свободы движения. Движение вперед-назад, вдоль комнаты, вверх и вниз. Мостовой кран состоит из трех балок, две расположены по длине комнаты и крепятся к потолку анкерными болтами. Общий вес крана составляет 500 кг. Длина мостового крана составляет 5,5 метров, вдоль комнаты 4,1 метров. Чертеж мостового крана приставлен на рисунке 5.1. Условия искусственного освещения в лабораторных кабинетах оказывают большое влияние на зрительную работоспособность, физическое и моральное состояние студентов. Необходимо провести расчет освещения, для проверки соответствия. Для организации общего искусственного освещения были выбраны лампы типа ЛБ40. Как известно люминесцентные лампы более энергоэффективные. Имеют долгий срок службы. Но основной недостаток заключается в том, что газ внутри лампы загрязняет окружающую среду больше чем лампы накаливания. Нормой средней горизонтальной освещенности лабораторного кабинета образовательного учреждения составляет 500
Общий световой поток всех ламп:
Найдем фактическую величину горизонтальной освещенности:
Делаем вывод:
Освещение соответствует требованиям. Так же в работе мостового крана необходимо учитывать производимый шум. В зависимости от назначения и технических параметров электродвигателей уровень их шума может быть различным: от 30–40 до 100–120 дБ. Для электродвигателей общепромышленного назначения характерен уровень шума 60–95 дБ, причем преобладают обычные средние частоты (200–2000 Гц). Далее будем производить расчет по шуму.
Расчет шума
Необходимые для расчета данные: Габариты комнаты: - Д.=6 м; - Ш.=6 м; - В.=3,3 м; - Объем комнаты 118,8 м3; Расстояния от двигателей до измеряемой точки: - - - Данные об уровнях звукового давления представлены в таблице 5.1. Наибольший габаритный размер источников шума:
Таблица 5.1 – Уровни звукового давления, создаваемые электроприводом.
В помещение с двумя и более источниками шума уровни звукового давления следует определять по формуле:
где
n – сумма всех источников шума; m – ближайшие источники шума у измеряемой точки.
Расстояние от измеряемой точки до акустического центра:
и ближайший к ней источник:
Сумма всех источников шума, принимаемых в расчет и расположенных вблизи расчетной точки, когда, будет равно 3 (m=3), т. е. учитываются все данные источники, расположенные на расстояниях
Рисунок 5.2 – Зависимость эмпирического коэффициента
Данный коэффициент учитывает влияние ближайшего акустического поля. Рассчитаем:
т.к. Если а) на поверхности пола, стены, перекрытия б) в пространстве в) в двухгранном углу, образованном ограждающими поверхностями г) в трехгранном углу, образованном ограждающими поверхностями Следующий параметр – постоянная помещения:
где Для лаборатории стоит принять:
тогда:
Частотный множитель μ, определил по таблице 5.2.
Таблица 5.2 – Значения частотного множителя
Коэффициент «ψ», учитывающий нарушение диффузности звукового поля определяем графику на рисунке 5.3, из отношения
Рисунок 5.3 – Коэффициент нарушения диффузности звукового поля ψ
Таблица 5.3 – Значение коэффициент нарушения диффузности звукового поля
где
Таблица 5.4 – Допустимые уровни звукового давления
Проведем расчет для частоты в 63 Гц. Для частоты 63 Гц Рассчитываю
Считаю площадь по формуле
Затем по формуле
Далее произведем расчет по формуле:
где значение коэффициента μ – найдем из таблицы 2, где для V<200 м3 и для частоты 63 Гц μ=0,8. Тогда:
Далее производим такой расчет:
Затем просуммируем значения:
Теперь можно найти:
После этого по таблице 5.4 выбираем для частоты 63Гц значение Окончательным расчетом является определение значения:
Результаты расчета всех остальных данных сведены в таблицу 5.5.
Таблица 5.5 – Результаты расчета
По результатам расчетов получается фактическое значение уровня шума ниже фактического. Шум установленых электродвигателей соотвествует требованиям.
Экономическая часть
В данном проекте рассмотрены три варианта системы управления электроприводами: а) силовыми контроллерами; б) автоматизированная система с силовыми контроллерами; в) посредством частотного преобразования. Приведен расчет капитальных затрат и определена экономическая эффективности. Капитальные вложения определяются из свободной оптовой цены на оборудование и транпортно-монтажных расходов, приведены в таблицах 6.1, 6.2, 6.4. А итоговая смета затрат в таблицах 6.3, 6.5.
Заключение В заключение дипломного проекта можно отразить основные выводы и результаты: - рассмотрены основные требования, предъявляемые к электроприводу и системе управления; - разработана функциональная схема мостового крана, где отражены все основные элементы и описана основная конструкция грузоподъемного механизма. б) механические характеристики системы ПЧ-АД при постоянстве перегрузочной способности для заданных частот и выбран закон частотного регулирования. На основе расчетов и анализа номенклатуры серийно выпускаемых ПЧ был выбран преобразователь частоты; в) по третьей главе: был проведен расчет и выбор элементов силовой схемы, то есть расчет силовых элементов инвертора и выпрямителя и выбор серийного преобразователя частоты; г) по четвертой главе: дано описание математической модели ПЧ-АД и проведено моделирование в программной среде Matlab. В ходе моделирования были получены осциллограммы выходного напряжения, тока, скорости и момента при заданных частотах и коэффициентах модуляции; д) по пятой главе: - проведен анализ условий труда лаборатории. Рассчитана фактическая величина горизонтальной освещенности для искусственного освещения. Установленное освещение соответствует требованиям; - произведен расчет шума от работы электродвигателей. Полученные значения сравнивались с допустимыми. На всех среднегеометрических частотах уровень звукового давления оказался ниже допустимых. е) по шестой главе: - рассчитаны капиталовложения трех систем и эксплуатационные двух основных систем управления. Расчет проводил на примере реального объекта; - сравнивалось два варианта системы управления. Была рассчитана экономическая эффективность внедрения более нового варианта. В итоге окупаемость составила 5,19 лет.
Список используемой литературы 1 Садовский И. М. Согласованное вращение асинхронных двигателей, “Электрический вал”. –М.: Государственное энергетическое изд-во, 1948. – 135с. 2 Чиликин М. Г., Сандлер А. С. Общий курс электропривода. – М.: Энергоиздат, 1981. – 576 с. 3 Кацман М. М. Электрические машины. – М.: Высшая школа, 1990. – 463с. 4 Сагитов П. И. Учебное пособие. Электропривод промышленных механизмов. – А.: АУЭС 2012. – 67 с. 5 Терехов В. М. Элементы автоматизированного электропривода. – М.: Энергоатомиздат, 1987. – 223 с. 6 Садовский И. М. Согласованное вращение асинхронных двигателей, “Электричесвто”. – М.: Государственное энергетическое изд-во, 1935. 7 Кустанович М. И. Электрический вал для подъемного устройства. – М.: Динамо, 1937. 8 Электропривод. Учебно-методический комплекс // [Персональная страница Воронина С. Г.] / Россия. 2011. URL: http://model.exponenta.ru/epivod/index.htm (дата обращения 20.02.2016). 9 Чиликин М. Г., Ключев В. И., Сандлер А. С. Теория автоматизированного электропривода. – М.: Энергия, 1979. 616 с. 10 Жакупов А. А. Методические указания по экономической части дипломного проекта. – А.: АУЭС, 2015. 11 Дюсебаев М. К., Бегимбетова А.С. Безопасность жизнидеятельности. Методические указания к выпускной работе. – А.: АИЭС, 2008. 12 ГОСТ 12.1.003 - 83. Шум. Общие требования безопасности. - М.: Изд-во стандартов, 1984. 13 Дюсебаев М. К., Абдимуратов Ж. С. Охрана труда и безопасность жизнедеятельности: Учебное пособие. – А.: АУЭС, 2011. 14 Айзенберг Ю. Б. Справочная книга по светотехнике. – М.: Энергоатомиздат, 1995. 15 Руководство по эксплуатации оборудования // Официальный сайт компании ОВЕН / Россия. 2016. URL: http://www.owen.ru/ (дата обращения 15.04.2016). 16 Каталог продукции // Группа компании IEK / Россия. 2016. URL: http://www.iek.ru/ (дата обращения 17.04.2016). 17. Чиликин М.Г., Сандлер А.С. Общий курс электропривода: Учебник для вузов. – 6-е изд. доп. и перераб. – М.: Энергоиздат, 1981. – 576 с., ил. 18. Siemens Micromaster 420. Руководство по эксплуатации. 19. Браславский И.Я. Энергосберегающий асинхронный электропривод: Учеб. Пособие для студентов высш. учеб. заведений / И.Я. Браславский, З.И. Ишматов, В.Н. Поляков; Под ред. И.Я. Браславского. – М.: Издательский центр «Академия», 2004. – 256 с. 20. Асинхронные двигатели 4А: Справочник/ А 90 А.Э. Кравчик, М.М. Шлаф, В.И. Афонин, Е.А. Соболенская. – М.: Энергоиздат, 1982. – 504 с., ил. 21. Башарин А.В., Новиков В.А., Соколовский Г.Г. Управление электроприводами: Учебное пособие для вузов. – Л.: Энергоиздат. Ленингр. отд-е, 1982. – 392 с., ил. Аннотация
В дипломном проекте приводится разработка электрических схем управления механизмами тележки и подъема лабораторного мостового крана, предназначенного для ознакомления студентов с современным оборудованием и средствами автоматизации. Дается описание функциональной схемы, обеспечивающей программный выход подъемного механизма в заданную точку, обосновывается выбор электропривода по системе ПЧ-АД и расчет механических характеристик при частотном регулировании. На основе расчета силовых элементов ПЧ производится выбор серийного преобразователя. Рассмотрены вопросы охраны труда и экономики.
Аңдатпа
Дипломдық жобада арба механизмдерін басқарудың электр сұлбалары мен студенттерге заманауи жабдықтар мен автоматтандыру құрылғыларымен таныстыруға арналған зертханалық көпірлі кранды көтерудің əзірленуі келтірілген. Белгіленген нүктедегі көтерілу механизмінің бағдарламалық шығуын қамтамасыз ететін функционалды сұлбаның жүйеленіп баяндалынуы беріліп, АҚ-ЖТ (ассинхронды қозғалтқыш жиілігінің түрлендірушісі) жүйесі бойынша электржетек таңдауы мен жиіліктік реттеу барысындағы механикалық сипаттамалардың есептелінуі өз орнын тапты. ЖТ күштік элементтерінің есептелінуі негізінде сериялық түрлендіргіш таңдауы жүргізілінеді. Еңбекті қорғау жəне экономика сұрақтары да қарастырылған. Annotation
Diploma project provides the development of electric charts of management, which is driven by the mechanisms of light cart, and rising of the laboratory-travelling crane intended for the acquaintance of students with a modern equipment and facilities of automation. There is given the description of functional diagram providing the programmatic exit of lifting mechanism in the set point, the choice of electromechanic by system of transformer of frequency of induction motor and calculation of mechanical descriptions are grounded at the frequency adjusting. On the basis of calculation of power elements transformer of frequency of the choice of serial transformer is produced. The questions of labour and economy protection are considered.
Содержание
Введение 9 1 Разработка системы управления передвижением моста 10 1.1 Основные требования к электроприводу моста и системы управления 10 1.2 Устройство лабораторного мостового крана. 11 2. Расчет механических характеристик частотно-регулируемого электропривода 21 2.1 Механическая характеристика при законе U/f=const (f1= 50 Гц) 21 2.2 Механическая характеристика при законе U/f=const (f1= 40 Гц) 26 2.3 Механическая характеристика при законе U/f=const (f1= 30 Гц) 28 2.4 Механическая характеристика при законе U/f=const (f1= 20 Гц) 29 2.5 Механические характеристики с сохранением постоянства перегрузочной способности 32 3. Расчет и выбор элементов силовой схемы 41 3.1 Расчет силовых элементов инвертора и выпрямителя 41 3.2 Выбор серийного преобразователя частоты 45 4. Моделирование системы ПЧ-АД. 50 4.1 Математическая модель системы ПЧ-АД 50 4.2 Виртуальная модель ПЧ- АД в программной среде Matlab 53 4.3 Осциллограммы процессов при пуске и набросе нагрузки 54 5 Безопасность жизнедеятельности труда 59 5.1 Анализ условий труда 59 5.2 Расчет шума 61 6 Экономическая часть 67 6.1 Расчет капитала вложений и эксплуатационных издержек 67 6.2 Расчет экономической эффективности 73 Заключение 74 Список используемой литературы 75 Введение
Мостовые краны являются одним из главных устройств цехов, предназначающиеся для перемещения грузов и оборудования в ходе производства. Электроприводы мостовых кранов в основном оборудованы нерегулируемым по частоте вращения асинхронным электродвигателем (управление релейно-контакторное). В последнее время возникла возможность оборудования мостовыми кранами все системы управления, позволяющие создать условия безопасного, удобного и более эффективного управления всем технологическим процессом. Это обусловлено развитием микропроцессорной техники. С этой целью могут быть использованы микроконтроллеры, панели оператора позволяющие отображать ход выполнения технологического процесса, программные реле. Нерегулируемые электропривода механизмов мостового крана оснащен на регулированными электроприводами по система ПЧ-АД, позволяющие осуществить плавный пуск и передвижение механизмов мостового крана. В то же время появилась возможность программного управления механизмами крана, с обеспечением выхода в заданную точку в автоматическом режиме. При этом взаимодействие между элементами системы управления и регулирования электроприводов осуществляется с применением интерфейсов связи RS-485 и др. С целью обучения студентов современным технологиям в автоматизации в лаборатории кафедры ЭиАПУ реализована механическая часть мостового крана, содержащая механизм передвижения моста и тележки с подъемным механизмом. Установлены несущие балки, редуктора и двигатели. Необходимо провести расчет мощности двигателей для крана, и сравнить с уже установленными электродвигателями. Для обеспечения программированного выхода подъемных механизмов в заданную точку, на элементах конструкции мостового крана установлены датчики, контролирующие положения механизмов крана. В дипломном проекте ставиться задача разработки электрических схем управления электродвигателями моста, обеспечивающие их синхронизацию, разработка конструкции стенда и размещение необходимого оборудования с целью проведения учебных занятий. Разработка системы управления передвижением моста
1.1 Основные требования к электроприводу моста и системы управления
Перечислим их: а) безопасность, устойчивость. В продолжение определенного времени и в определенных условиях электропривод должен стабильно, без перебоев осуществить набор команд. Это важнейшее требование, ибо без этого другие его качества могут стать ненужными. В различных сферах использования электродвигателя различные требования по надежности. Рассмотрим это на примере компрессора бытового холодильника. Продолжительность его работы не должна быть очень длительным; при сбое не должна привести к тяжелым последствиям; б) четкость, неукоснительность, конкретность. Под этими качествами подразумеваем отличия между фактическими параметрами и установленными. Эти параметры должны быть в пределе разрешенных значений. В качестве примера можно привести электропривод звукозаписывающих устройств: главное условие – постоянная заданная скорость вращения; в) быстрота действия. Это свойство электродвигателя тесно связано с вышеописанным требованием. Обозначает стремительную восприимчивость к разным подающимся сигналам. К примеру, следящий электропривод. Чем быстрее последует ответ от привода при учащенном изменении регулирующего сигнала, тем сама вероятность ошибки будет ниже; в) энергетическая высокоэффективность. Расход электричества электроприводом является, чуть ли, не главнейшим критерием при выборе электропривода, особенно в тех случаях, когда речь идет о больших мощностях, о продолжительном режиме пользования электроприводом или когда имеем дело с переносной аппаратурой. Важно выбирать электродвигатель с высоким значением коэффициента полезного действия, так как различные физические явления, происходящие с электродвигателем, обусловлены именно потерями; г) все прочие свойства. Например, размер, материал, форма. Электродвигатели обладают рядом свойств, что позволяет их по схожим свойствам разделить на две категории: а) по первой категории свойств электродвигатели подразделяются относительно метода регулирования – ручной, автоматический и полуавтоматический методы: 1) при ручном регулировании диспетчеру приходится непосредственно иметь дело с простейшими компонентами регулирования. Есть ряд недостатков, таких как необходимость присутствия диспетчера при регулировании, близкое расположение этих регуляторов к непосредственно самим электродвигателям, в большинстве случаев невысокая надежность; при полуавтоматическом регулировании диспетчер имеет возможность пользоваться; 2) автоматическими приборами, которые выполняют лишь определенную часть операций. При полуавтоматическом методе регулирования отпадает нужда непрерывного присутствия человека при проведении операции, увеличивается надежность. Отрицательная черта такого регулирования заключается в относительно низкой быстроте действия, так как диспетчеру необходимо время для выбора режима. Не стоит забывать и про человеческий фактор, что отнюдь не добавляет привлекательности полуавтоматическому методу регулирования; 3) и последний по счету, но не по важности и сложности метод регулирования – автоматический. Все без исключения процедуры протекают без какого-либо вмешательства человека в производство. Этот метод требует максимальную надежность и быстродействие. б) во второй категории мы будем подразделять электродвигатели по разновидности выполняемых процессов. Всего выявили 6 подразделений: 1) к этой группе относятся нерегулируемые электроприводы. Судя по названию можно говорить о неконтролируемости скорости этих приводов. Эти двигатели обеспечивают остановку, автоматический запуск и реверс. Применяются в вентиляционных и насосных системах; 2) регулируемые электродвигатели. Позволяют изменять темп вращения. Применяются в подъемных и транспортных механизмах; 3) к этой группе двигателей отнесем те, для которых непостоянные промышленные условия не могут быть помехой для надежности и безостановочности всего производственного процесса. Наличие обратной связи является главной отличительной чертой электродвигателей относящихся к этой группе; 4) сюда мы отнесем электроприводы, производящие сверхточное отслеживание сигнала управления. Используем для отслеживания изменения температуры, уровень воды, расстояние, скорость; 5) электродвигатели, работающие по предварительному программному плану. Включает в себя все вышеперечисленные группы; 6) автоматические, саморегулирующиеся системы. Вбирают в себя все свойства вышеперечисленных категорий для создания более, подходящего, оптимального режима работы.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-01-25; просмотров: 273; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.149.234.141 (0.205 с.) |
 . В кабинете лаборатории стоят 4 светильника по 2 люминесцентные лампы. Мощность каждой составляет 36 Вт. Световой поток равен 2850 лм. Площадь кабинета составляет 36
. В кабинете лаборатории стоят 4 светильника по 2 люминесцентные лампы. Мощность каждой составляет 36 Вт. Световой поток равен 2850 лм. Площадь кабинета составляет 36  . Тогда:
. Тогда:




 ;
; ;
; .
.


 ;
; – уровень звуковой мощности каждым источником шума;
– уровень звуковой мощности каждым источником шума;
 .
. ,
,  и
и  ;
;  – коэффициент, принимаемый в зависимости от отношения
– коэффициент, принимаемый в зависимости от отношения  которые показана на рисунке 5.2.
которые показана на рисунке 5.2.
 – наибольший габаритный размер источников шума.
– наибольший габаритный размер источников шума.
 принимаем
принимаем  ; Ф – фактор направленности источника шума, принят равным единице;
; Ф – фактор направленности источника шума, принят равным единице;  – площадь воображаемой поверхности проходящий через измеряемую точку и источники шума.
– площадь воображаемой поверхности проходящий через измеряемую точку и источники шума. , следует принимать площадь находящию:
, следует принимать площадь находящию: ;
; ;
; ;
; .
.
 – постоянная помещения, зависит от объема помещения, которая зависит от его типа.
– постоянная помещения, зависит от объема помещения, которая зависит от его типа.

 и таблице 5.3;
и таблице 5.3; – сумма всех площадей поверхности комнаты (
– сумма всех площадей поверхности комнаты ( );
);


 , дБ
, дБ 
 – октавный уровень звукового давления в расчетной точке;
– октавный уровень звукового давления в расчетной точке; – указаны в таблице 5.4.
– указаны в таблице 5.4.
 дБ.
дБ. :
: .
. ,
, ,
, .
. получаем:
получаем:





 .
.