
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Роль активного сопротивления обмотки ротора на механическую характеристику асинхронного двигателя⇐ ПредыдущаяСтр 14 из 14
Из выражения (9.10) следует, что скольжение при котором асинхронная машина развивает максимальный электромагнитный момент, пропорционально активному сопротивлению фазы обмотки ротора. То есть, чем больше активное сопротивление фазы обмотки ротора, тем больше Sкр, но тем ниже критическая скорость его вращения (рис. 9.4).
Обычно для практических расчетов пренебрегают активным сопротивлением обмотки статора R1 из-за его малости по сравнению с суммарным индуктивным сопротивлением Xk= X1+X'2 и тогда формула (9.10) принимает простой и удобный для расчета вид:
Подставив в формулу момента (9.9) величину скольжения Sкр, из (9.10) получим выражение для максимального электромагнитного момента асинхронного двигателя.
Формула (9.13) свидетельствует о том, что максимальный электромагнитный момент не зависит от активного сопротивления цепи ротора (рис. 9.4).
Рис. 9.4. Зависимость механической характеристики Модифицировав формулу (9.9), [1] получили удобную для расчетов формулу Клосса (9.14)
где a = R1/R'2. Если в числителе и знаменателе формулы (9.14) пренебречь числом aSкр ввиду его малости, то получим простое соотношение
Чтобы работа асинхронного двигателя была надежной и чтобы случайные кратковременные перегрузки не вызывали остановок двигателя, необходимо, чтобы он обладал перегрузочной способностью. Перегрузочная способность двигателя определяются отношением максимального момента Мmax к номинальному Мном. Для асинхронного двигателя общего назначения перегрузочная способность составляет Мmax/Мном = 1,7÷2,5. 39.Короткозамкнутые и фазные роторы асинхронных двигателей. Асинхронная машины, как и любая другая электрическая машина вращающегося движения, состоит из неподвижной части и подвижной. Статор состоит из корпуса цилиндрической формы, выполненного из чугуна, стали или сплава легких металлов. В корпус запрессовываются листы электротехнической стали (толщиной 0,5; 0,35 мм), образующих неподвижный кольцевой стальной сердечник, имеющий на внутренней поверхности пазы, в которые укладываются катушки, так называемой трехфазной обмотки (рис. 1.1). Подвижная часть – это ротор. Основанием ротора является стальной вал, на который также напрессовываются листы электротехнической стали, образующие цилиндрический сердечник ротора с пазами на внешней стороне сердечника. Вал удерживается боковыми подшипниковыми щитами, которые крепятся к торцам корпуса статора. Сердечники статора и ротора отделены друг от друга равномерным воздушным зазором.
В зависимости от конструктивного выполнения электрической обмотки ротора трехфазные асинхронные двигатели подразделяют на два основных типа: короткозамкнутые двигатели и двигатели с контактными кольцами (двигатели с фазным ротором). Короткозамкнутые двигатели Двигатели этого типа снабжаются многофазной стержневой обмоткой, выполненной в виде «беличьей клетки». В старых типах машин «беличья клетка» изготовлялась из медных стержней круглого или овального сечения, которые плотно вставлялись без изоляции в закрытые пазы сердечника ротора. Концы стержней замыкались накоротко между собой на торцах ротора медными кольцами. В настоящее время «беличья клетка» изготовляется путем прямой заливки пазов ротора расплавленным алюминием. В этом случае замыкающие кольца составляют одно целое со стержнями, причем на них одновременно отливаются и вентиляционные лопасти. Двигатели с контактными кольцами Эти двигатели на роторе имеют трехфазную обмотку, выполненную по типу обмотки статора, поэтому они имеют второе название – двигатели с фазным ротором. Три вывода такой обмотки обычно соединяют в звезду, а три свободных конца обмотки подводят к трем контактным кольцам, насаженным на вал и изолированным друг от друга и от вала. При помощи неподвижных щеток, укрепленных на боковом подшипниковом щите, контактные кольца могут соединяться с регулируемым трехфазным реостатом, что дает возможность видоизменять механическую характеристику этого типа электродвигателей, т. е. улучшать пусковые характеристики и изменять частоту вращения ротора.
40.Синхронные машины с явно выраженными и неявно выраженными полюсами. У неявнополюсной машины Xd= Xq, тогда (1/Xd – 1/Xq) = 0.
Первое слагаемое выражения (17.9) превращается в ноль, остается
Графически это выражение примет вид синусоиды (рис. 17.2).
Рис. 17.2. Угловая характеристика электромагнитного Здесь угол поворота ротора θ = 180° соответствует повороту на одно полюсное деление Mmax при θ = 90°; M = Mmaxsinθ. (17.11) Полуволны синусоиды (рис. 17.2) при М > 0 соответствует генераторному режиму работы, а при М < 0 – двигательному. Как следует из рис. 17.2, при беспрерывном изменении θ синхронная машина попеременно переходит из генераторного режима работы в двигательный и обратно. Такое изменение θ означает, что ротор машины вращается не синхронно.
Как следует из выражения (17.12), момент Mmax тем больше, чем больше Ef (или ток возбуждения), чем больше напряжение сети UC и чем меньше Xd. Поэтому с целью уменьшения Xd в синхронных машинах зазор выполняется большим, чем в асинхронных машинах. В установившемся режиме работы генератора механический момент M1 на валу первичного двигателя (паровая или гидротурбина) равен электромагнитному моменту M, развиваемому генератором (рис. 17.3). Момент М1 не зависит от угла поворота ротора и поэтому изображен горизонтальной прямой, которая пересекается с характеристикой M = f(θ) в точках 1 и 2. В точке 2 работа будет неустойчивой. Если при работе в точке 2 угол θувеличится на Δθ (точка 2 ”), то момент генератора уменьшится и станет меньше момента первичного двигателя (M–ΔM) < M1, ротор будет ускоряться, угол θеще больше возрастет и т. д. В результате генератор выйдет из синхронизма, перейдет в двигательный режим и т. д. Если же при работе в точке 2 угол θуменьшится, то вследствие нарушения баланса моментов будет уменьшаться и далее, пока этот баланс M = M1 не восстановится в точке 1. Таким образом, работа неявнополюсного генератора устойчива в области 0 < θ< 90° и неустойчива в области 90 < θ < 180°. Поэтому угол Если неявнополюсную машину не возбуждать if= 0, Ef= 0, то электромагнитный момент не будет развиваться. согласно выражению (17.10) M = 0. Угловая характеристика синхронной машины Если if= 0, то и Еf= 0. в этом случае на основании выражения (17.9)
Зависимость M = f(θ), согласно равенству (17.13) представляет собой синусоиду с удвоенной частотой (рис. 17.4). Из равенства (17.13) и рис. 17.4 следует, что явнополюсная машина в состоянии развивать момент при синхронном режиме работы без возбуждения.
Рис. 17.4. Угловая характеристика момента с удвоенной частотой В этом случае устойчивая работа в режиме генератора происходит при 0° < θ< 45°, а в режиме двигателя – при –45°< θ < 0°. Пределу устойчивой работы соответствует θкр= ±45°. В рассматриваемом случае в машине существует только поток реакции якоря. В явнополюсной машине ротор стремится занять по отношению к вращающемуся полю положение, при котором сопротивление магнитному потоку и энергия магнитного поля минимальны.
У невозбужденной явнополюсной машины электромагнитный момент развивается вследствие действия поля реакции якоря при наличии неравномерности воздушного зазора (Xd≠ Xq) и поэтому называются реактивным. В электропромышленности выпускается синхронные двигатели малой мощности без обмотки возбуждения и называется реактивными (см подразд. 17.4). 17.3.2. Возбужденная явнополюсная машина В этом случае оба члена равенства (17.9) отличны от нуля и машина развивает мощность как за счет электромагнитного момента, создаваемого потоком возбуждения, кривая 1 на рис. 17.6, так и за счет реактивного электромагнитного момента, кривая 2 на рис. 17.6. Сумма моментов по кривым 1 и 2 дает результирующий момент, кривая 3. Максимальная мощность и предел устойчивости работы в данном случае наступает при критическом угле θкр, который, как правило θкр< 90°.
Рис. 17.6. Зависимость электромагнитных моментов в возбужденной
41.Режим холостого хода асинхронного двигателя, скольжение. Электромагнитный момент. Важнейшим параметром асинхронной машины является скольжение – величина, характеризующая разность частот вращения магнитного поля и ротора.
В соответствии с принципом обратимости электрических машин асинхронные машины могут работать как в двигательном, так и в генераторном режимах. Кроме того, она может работать и в режиме электромагнитного торможения противовключением. Холостой ход. Режим холостого хода. Если пренебречь трением и магнитными потерями в стали (идеализированная машина), то ротор асинхронного двигателя п ри холостом ходе вращался бы с синхронной частотой n=n1 в ту же сторону, что и поле статора; следовательно, скольжение было бы равно нулю. Однако в реальной машине частота вращения ротора n при холостом ходе никогда не может стать равной частоте вращения n1, так как в этом случае магнитное поле перестанет пересекать проводники обмотки ротора и в них не возникнет электрический ток. Поэтому двигатель в этом режиме не может развить вращающего момента и ротор его под влиянием противодействующего момента сил трения начнет замедляться. Замедление ротора будет происходить до тех пор, пока вращающий момент, возникший при уменьшенной частоте вращения, не станет равным моменту, создаваемому силами трения. Обычно при холостом ходе двигатель работает со скольжением s = 0,2-0,5 %.
Двигательный режим При помощи постороннего двигателя частота вращения ротора При этом скольжение
В этом случае ротор и поле будут взаимно неподвижны, а токи в роторе и электромагнитные силы исчезнут. Такой режим называют идеальным холостым ходом асинхронной машины.
Пусть под действием электромагнитного момента ротор начал вращаться с частотой вращения магнитного поля (n = n 0). При этом в обмотке ротора ЭДС E 2 будет равна нулю. Ток в обмотке ротора I 2=0, электромагнитный момент M тоже станет равным нулю. (т.к. момент пропорционален квадрату напряжения U2)
Зависимость электромагнитного момента от скольжения.
|
||||||||
|
|
Последнее изменение этой страницы: 2017-01-24; просмотров: 929; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.191.157.186 (0.018 с.) |
 . (9.11)
. (9.11) . (9.12)
. (9.12)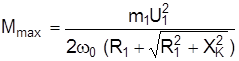 . (9.13)
. (9.13)
 , (9.14)
, (9.14) . (9.15)
. (9.15) . (17.10)
. (17.10)
 Согласно рис. 17.3 при увеличении момента от нуля угол θ также будет изменяться от 0 и при критическом угле θкр = 90° достигается максимальный момент M = Mmax, который способен развить генератор. Для неявнополюсной машины
Согласно рис. 17.3 при увеличении момента от нуля угол θ также будет изменяться от 0 и при критическом угле θкр = 90° достигается максимальный момент M = Mmax, который способен развить генератор. Для неявнополюсной машины . (17.12)
. (17.12) . (17.13)
. (17.13)
 Если вал нагружен внешним моментом, то положение ротора относительно поля статора смещается, θ ≠ 0 и в машине развиваются электромагнитный момент и активная мощность (рис. 17.5).
Если вал нагружен внешним моментом, то положение ротора относительно поля статора смещается, θ ≠ 0 и в машине развиваются электромагнитный момент и активная мощность (рис. 17.5).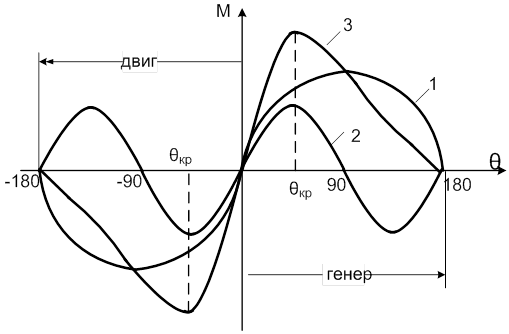
 или
или  (2.1)
(2.1) . (2.3)
. (2.3)



