Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Техническая характеристика фотограмметрического прибора
“Стереоанаграф-6”
Прибор аналитический фотограмметрический “Стереоанаграф-6” предназначен для создания планов и карт всего масштабного ряда. Расширенный пакет программ обеспечивает дополнительные возможности прибора по обработке космических, архитектурных и маркшейдерских фототеодолитных снимков. Прибор работает под управлением оператора персональной электронной вычислительной машины, укомплектованной пакетом прикладных программ, который позволяет автоматизировать процессы: тестирование прибора; подготовку исходных данных; внутреннее, внешнее и взаимное ориентирование снимков; оценку точности ориентирования снимков обрабатываемой стереопары; выдачу информации на плоттер, принтер. Стереоанаграф состоит из ПЭВМ, стереокомпаратора, координатографа. ПЭВМ включает в себя программное обеспечение, модуль связи стереокомпаратора (МСС), модуль связи координатографа (МСК), предназначена для: - выполнения совместно со стереокомпаратором и координатографом задач технологических операций, заложенных в программном обеспечении прибора; - вычисления координат элементов снимков обрабатываемой стереопары и создаваемых планов; - хранения результатов обработки снимков, выдачи их на печатающее устройство, дискету и координатограф; - обмена информацией между стереокомпаратором, координатографом и программным обеспечением; - управления работой стереокомпаратора и координатографа в процессе выполнения технологических операций, заложенных в программном обеспечении; Стереокомпаратор может работать в трёх режимах: режиме комбинированного управления, при котором управление осуществляется оператором с применением ручных штурвалов, ножного штурвала и программным обеспечением; режиме программного управления (без применения ножного и ручных штурвалов); режиме ручного управления (без участия программного обеспечения).
Координатограф включает вместо снимкодержателя пишущее устройство, сервопривод и датчик. Как и стереокомпаратор, работает в трёх режимах. В основе графоаналитического метода лежит решение фотограмметрической засечки с использованием ПЭВМ. Метод является перспективным при построении планов и карт, а также при решении различных маркшейдерских задач при разработке открытым способом. Лазерное сканирование в карьерах и разрезах Основные положения и технология Лазерного сканирования Для построения точной масштабной модели какого-либо объекта, будь это карта местности, план карьера или отвала, план-схема расположения технологического оборудования, необходимо сначала провести геодезические измерения и получить пространственные координаты всех характерных точек, а затем представить их в графическом виде. Определение пространственных координат точек объекта, или съемка, составляет наиболее трудоемкую и затратную часть всей работы. Как правило, при производстве достаточно больших объемов полевых измерений геодезистами используется современное оборудование, в первую очередь электронные тахеометры, позволяющие получать координаты съемочных точек с миллиметровым уровнем точности. Принцип работы электронного тахеометра основан на отражении узконаправленного лазерного пучка от отражающей цели и измерении расстояния до нее. Отражателем в общем случае служит специальная призма, установленная на вешке или закрепленная на поверхности объекта. Измерение двух углов – горизонтального и вертикального дает возможность вычислить трехмерные пространственные координаты точки отражения, а возможности полевого кодирования позволяют назначить съемочному пикету уникальный идентификационный код. Поскольку скорость измерения тахеометра относительно невысока – не более 2 измерений в секунду, то такой метод эффективен при съемке разреженной, не загруженной объектами площади. Кроме этого, при производстве съемки зачастую приходится сталкиваться со сложностями, связанными с координированием неприступных объектов либо участков, где нахождение человека либо невозможно, либо небезопасно, либо создает препятствия для нормальной работы технологического оборудования.
Появление в последние годы безотражательных электронных тахеометров, имеющих возможность работать без специальных призм, и их широкое использование в практике маркшейдерско-геодезических измерений, позволило не только эффективно производить тахеометрическую съемку неприступных объектов, объектов сложной конфигурации, для съемки которых приходилось использовать шесты и лестницы, но и в ряде случаев полностью отказаться от рабочего с рейкой. Для координирования пикетной точки достаточно просто навестись на нее и нажать одну клавишу на панели управления, лазерный луч отражается от любой достаточно ровной поверхности, находящейся на расстоянии до 500 метров от точки установки прибора. Внедрение новых технологий в области традиционных геодезических и смежных с ними координатных измерений все же не в полной мере удовлетворяет качество и полноту получаемых данных для построения цифровых моделей измеряемых объектов. До недавнего времени еще оставался открытым вопрос о том, сколько времени потребуется на съемку достаточно крупных и динамично изменяющихся объектов, таких, как рабочий борт карьера, отвал пустых пород или склад руды; с какой плотностью будут получены измерения, с какой точностью и достоверностью; какие затраты времени потребуются для детальной съемки объекта площадью десятки и сотни гектаров. Использование безотражательного электронного тахеометра может значительно сократить сроки выполнения полевого этапа работ, однако, все равно придется провести за прибором долгие часы и дни. Специфика горных работ: постоянное изменение объекта съемки во времени и в пространстве предопределяет необходимость проведения все новых и новых измерений. К тому же дискретные и разреженные координатные данные не позволяют с максимальной точностью описать объект съемки: слишком мало информации. Удовлетворить все потребности маркшейдера и геодезиста смог бы, пожалуй, безотражательный тахеометр, который ведет съемку автоматически, без участия оператора, со скоростью 5 тысяч измерений в секунду. Еще несколько лет назад такая технология проведения геодезических съемок представлялась абсолютно нереальной, однако сегодня она уже широко используется для выполнения различного рода съемочных работ. Название этой технологии – метод лазерного сканирования. Лазерное сканирование – это метод, позволяющий создать цифровую модель окружающего пространства, представив его набором точек с пространственными координатами. Несмотря на принципиальную новизну данного метода, его можно рассматривать как логическое продолжение развития безотражательных технологий и их использования в геодезических инструментах. Основное отличие метода лазерного сканирования от традиционных тахеометров – гораздо большая скорость измерений, сервопривод, автоматически поворачивающий измерительную головку инструмента в горизонтальной и вертикальной плоскостях, а самое главное – скорость (5000 измерений в секунду) и плотность (десятки точек на 1 кв. сантиметр поверхности). Полученная в результате измерений цифровая модель объекта представляет собой набор от сотен тысяч до нескольких миллионов точек, имеющих пространственные координаты с высокой точностью. Кроме этого в большинстве современных сканеров имеется встроенная цифровая камера, позволяющая для каждой точки трехмерного растрового изображения определить показатели интенсивности отражения и истинного цвета, которые на этапе камеральной обработки используются не только для трансформации растрового изображения в векторный формат, но и для изучения геологического строения объекта.
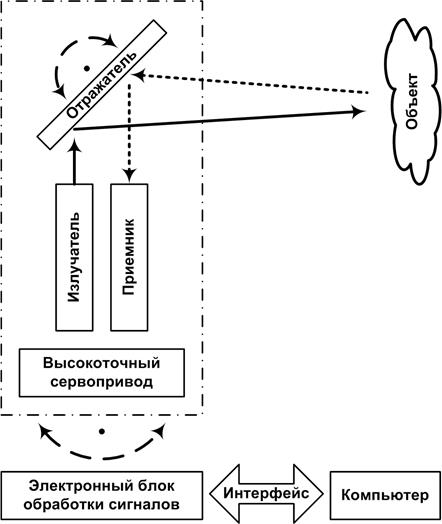
С другой стороны, лазерное сканирование не позволяет решить все проблемы маркшейдера простым нажатием кнопки. Законы физики и теории электромагнитного излучения не позволяют производить измерения сквозь непрозрачные объекты, вынуждая производить несколько сканов с различных точек и их дальнейшую сшивку для получения полной и цельной картины, но, несмотря на это, на сегодняшний день это самый быстрый и информативный метод получения данных об объекте. Принцип работы лазерного сканера тот же, что и у обычного электронного тахеометра, – измерение расстояния до объекта и двух углов – горизонтального и вертикального, что в конечном итоге дает возможность вычислить пространственные координаты точки. Лазерный излучатель с заранее определенным временным интервалом генерирует пучок электромагнитных волн, который отражается от поверхности снимаемого объекта и возвращается в приемник, как показано на рис. 5.11.
Рис. 5.11. Принцип работы лазерного сканера Одновременно с генерацией сигнала излучатель посылает сигнал «старт», который поступает в электронный блок обработки сигналов; в этот же блок поступает сигнал «стоп» от приемника, когда он получает отраженный от объекта сигнал. Излученный и принятый сигналы сравниваются, и по времени прохождения вычисляется расстояние до объекта. Вращающаяся призма, или зеркало, распределяет лазерный пучок по вертикали с заранее заданным шагом, например 0,1º. Таким образом, в отдельно взятом вертикальном скане будут измерены все точки с дискретностью 0,1º, что при вертикальном угле сканирования, равном 140º, даст 1400 съемочных точек. Затем высокоточный сервопривод поворачивает блок измерительной головки на угол, равный шагу измерения, и цикл измерений повторяется снова. При такой же дискретности 0,1º полный оборот сканера состоит из 3600 отдельных вертикальных плоскостей.
Таким образом, полная цифровая картина пространства будет представлена в виде набора из более чем 5 миллионов (5040000) точек с известными пространственными координатами, для получения которой необходимо затратить около 30 минут времени. Как правило, весь процесс съемки полностью автоматизирован, оператору необходимо только ввести параметры съемки – граничные углы в вертикальной и горизонтальной плоскостях и дискретность съемки. Данные измерений в реальном времени записываются на внешний или внутренний накопитель, а встроенная система визуализации выдает изображение на дисплей специального компьютера. Схематично любой лазерный сканер можно разделить на несколько основных блоков: 1. Измерительная головка, в которой расположены лазерный излучатель и приемник, обеспечивающие измерение расстояния до объекта. 2. Вращающееся зеркало, или призма, которое обеспечивает распределение лазерного пучка в вертикальной плоскости. 3. Высокоточный сервопривод горизонтального круга, который обеспечивает вращение измерительной головки в горизонтальной плоскости. 4. Электронно-вычислительный блок обработки сигналов со встроенным прецизионным таймером обеспечивает высокоточное измерение расстояний до объекта. 5. Внешний или внутренний компьютер, который предназначен для управления процессом съемки и записи данных на носитель. Типовая система лазерного сканирования способна проводить работы по получению трехмерной цифровой модели с точностью от долей миллиметра до 5 см на расстоянии от нескольких десятков до 2500 метров за время от нескольких секунд до десятков минут. Лазерный сканер имеет поле зрения от 40ºх40º до 360ºх180º и подходит для съемки и моделирования местности и инженерных объектов. После того, как произведены измерения в полевых условиях, начинается процесс обработки. Изначально «сырые измерения» представляют собой набор – «облако» точек, имеющих трехмерные координаты и дополнительные характеристики, такие как цвет и интенсивность отраженного сигнала. Облако точек, полученное при лазерном сканировании участка трансформаторной подстанции, приведено на рис. 5.12.
Рис. 5.12. Облако точек, полученное при лазерном сканировании объекта
Однако для практического применения результатов съемки облако точек необходимо представить в виде чертежей и схем в CAD-форматах и на твердых носителях. В настоящий момент времени никакое программное обеспечение не может успешно решить проблему распознавания образов в автоматическом режиме с той степенью достоверности, которая нужна пользователю, поэтому процесс обработки требует участия человека, и без кропотливого ручного труда в ближайшем будущем не обойтись.
Процесс обработки во многом зависит от желаемого результата, от того, что конкретно нужно получить. Это может быть само облако точек, пространственная сеть триангулированных ячеек (TIN), набор сечений, план, сложная 3D-модель либо просто набор измерений, таких, как длины, периметры, диаметры, площади, объемы. В целом камеральная обработка результатов лазерного сканирования состоит из нескольких основных этапов: 1. Предварительная обработка сырых сканов. На этом этапе обработки определяется качество полученных пространственных сканов, удаляются некачественные измерения, шумы и «фантомные» объекты. Причиной шумов в большинстве случаев являются атмосферные условия измерений – осадки в виде дождя и снега, влияние которых можно исключить с использованием системы фильтрации помех. Фантомные объекты возникают при кратковременном нахождении в зоне сканирования людей, животных, работающих механизмов. Поскольку лазерный сканер на определенных установках съемки способен «пробивать» частично прозрачные объекты, например травянистую растительность до почвенного слоя, фантомные поверхности могут возникать при таких видах съемки. 2. Объединение или «сшивка» сканов. Как правило, во время съемки объекта проводится несколько сканов для полного покрытия поверхности. Для создания единого скана необходимо произвести объединение – «сшивку» единичных сканов. Существует множество методов сшивки сканов с различной степенью автоматизации. Наиболее часто используется метод совмещения сканов по опорным точкам, которые отображаются на смежных сканах. В качестве таких точек могут быть использованы четко идентифицируемые объекты местности, специальные марки, призмы, светоотражающие пластины или наклейки, имеющие более высокий коэффициент отражения и поэтому вполне однозначно определяемые. 3. Трансформирование координат. Для точного представления чертежа, плана или схемы необходимо задание определенной единой системы координат. Начало системы координат каждого отдельного скана, производимого с определенной точки, находится в центре измерительной головки сканера, и при каждой новой съемке (точки сканирования) происходит перемещение центра сканирования в пространственной системе координат. Для связи координат объекта, полученных из разных сканов, необходимо выбрать единую систему координат, определить в ней центр сканирования для каждого отдельного скана и трансформировать все полученные координаты в единую систему. Если лазерное сканирование объекта выполняется с точек съемочного обоснования горного предприятия, особых проблем операция трансформирования координат не вызывает. В этом случае необходимо только указать в программе обработки координаты точек стояния прибора и высоту установки. В остальных случаях потребуется дополнительно закоординировать точки стояния прибора, например, при помощи электронного тахеометра. 4. Создание поверхностей. Основной и наиболее сложный процесс камеральной обработки заключается в представлении облаков точек математически описываемыми поверхностями. Как правило, математический аппарат прикладного программного обеспечения позволяет создавать простейшие правильные математические поверхности, такие, как плоскость, сфера, цилиндр и пр., либо аппроксимировать поверхность триангуляционным методом в виде TIN-поверхности. Созданные подобным образом поверхности вполне представимы в стандартных форматах типа DXF и могут быть экспортированы в любые CAD-приложения, в которых полученные поверхности можно трансформировать в планы и схемы, выделить характерные геометрические элементы, такие, как откосы, бровки уступов, назначить отдельным объектам условные знаки, построить изолинии, распечатать полученный чертеж на бумажном носителе. В случае, если сканирование сопровождается цифровой видео- или фотосъемкой, то на этапе обработки можно совместить сканированное изображение объекта с его видеоизображением, придав скану реальные цвета и структуру. Эта возможность позволяет попутно выполнять геологическое картирование при топографических съемках карьеров.
|
|||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-01-26; просмотров: 288; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.223.124.244 (0.024 с.) |