
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Улучшение качества процесса регулирования ⇐ ПредыдущаяСтр 4 из 4
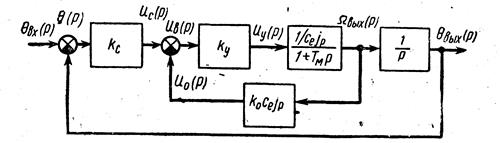
Под улучшением качества процесса регулирования, помимо повышения точности в типовых режимах, понимается изменение динамических свойств системы регулирования с целью получения необходимого запаса устойчивости и быстродействия. При решении задачи повышения запаса устойчивости проектируемой системы регулирования прежде всего необходимо попытаться рациональным образом изменить ее параметры (коэффициенты передачи отдельных звеньев, постоянные времени и т. п.) так, чтобы удовлетворить требованиям качества регулирования, которые определяются критериями качества. При невозможности решить эту задачу в рамках имеющейся системы приходится идти на изменение ее структуры. Для этой цели обычно используется введение в систему регулирования так называемых корректирующих средств, которые должны изменить динамику всей системы в нужном направлении. К корректирующим средствам относятся, в частности, корректирующие звенья, представляющие собой динамические звенья с определенными передаточными функциями. В тех случаях, когда корректирующие звенья используются именно для получения устойчивости системы регулирования или для повышения ее запаса устойчивости, они называются иногда демпфирующими или стабилизирующими звеньями. При этом имеется в виду, что звенья демпфируют колебания, которые возникают в системе регулирования. Получение требуемого быстродействия обычно обеспечивается при проектировании системы регулирования посредством выбора соответствующих элементов цепи регулирования (исполнительных органов, усилителей, серводвигателей и т. п.). Однако возможно улучшение быстродействия системы посредством использования корректирующих средств. Корректирующие звенья могут вводиться в систему регулирования различными способами. В качестве корректирующего средства могут использоваться обратные связи. Рассмотрим применительно к исходной системе введение в нее жесткой отрицательной обратной связи (рис.5).
Рис. 5. Структурная схема следящей системы с асинхронным двухфазным двигателем и жесткой обратной связью по скорости
На схеме передаточный коэффициент звена местной обратной связи, осуществляемой в следящей системе при помощи тахогенератора, представлен произведением koсejp. Наличие в последнем множителя jр вызвано тем, что для простоты изображения на структурной схеме не выделено звено, соответствующее механическому редуктору. Так как cе — скоростной коэффициент исполнительного двигателя, то безразмерный коэффициент ko характеризует соотношение между скоростью вращения ротора исполнительного двигателя и э. д. с. тахогенератора, наводимой в управляющей обмотке (это соотношение может быть различным как по причине разных конструктивных данных машин, так и вследствие применения специальных устройств, например переменного сопротивления в обмотке возбуждения тахогенератора или делителя напряжения в цепи местной обратной связи). Целесообразность такого обозначения передаточного коэффициента звена местной обратной связи заключается в упрощении передаточной функции и уравнений следящей системы.
3. ЗАДАНИЕ И ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
1. Ознакомиться с теоретическими сведениями. 2. Используя пакет прикладных программ MatLAB промоделировать структурную схему следящей системы (рис.4), в соответствии с исходными данными варианта (см. п.4). 3. Провести моделирование по заданной структурной схеме, получить и проанализировать графики переходного процесса, АФЧХ, ЛАЧХ и ЛФЧХ. 4. Используя пакет прикладных программ MatLAB промоделировать скорректированную структурную схему системы с жесткой отрицательной обратной связью по скорости (рис.5). 5. Записать и проанализировать результаты моделирования, сравнивая их с результатами расчета переходного процесса, АФЧХ, ЛАЧХ и ЛФЧХ для нескорректированной системы. 6. Сделать выводы о том, как влияет на устойчивость и качество переходного процесса введение в систему жесткой отрицательной обратной связи по скорости. 7. Оформить отчет и ответить на контрольные вопросы.
Данные для моделирования
4. КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Поясните принцип работы рассматриваемой следящей системы с асинхронным двухфазным двигателем. 2. Что такое структурная схема системы? В чем ее принципиальное отличие от функциональной схемы? 3. Что такое передаточная функция системы? Как она может быть получена? 4. Что показывают ЛАЧХ и ЛФЧХ? 5. Поясните физический смысл АФЧХ. 6. Для чего в систему вводятся корректирующие устройства? Какие виды корректирующих устройств вы знаете?
5. БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Теория систем автоматического регулирования. Бесекерский В.А., Попов Е.П. Изд. - 4-е переработанное и дополненное. - СПб: «Профессия», 2003. – 752 с.
Лабораторная работа №5 Последовательные корректирующие устройства
1.Цель работы Закрепление теоретических сведений, получение практических навыков моделирования типовых динамических звеньев, анализ полученных результатов моделирования.
2. ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ Корректирующие звенья последовательного типа могут составляться из различных по своей физической природе элементов — электрических, механических, гидравлических и т. д. Наиболее просто такие звенья могут быть составлены из электрических R-, С- и L- элементов. Электрические последовательные звенья имеют самое широкое распространение в системах автоматического регулирования, поэтому в дальнейшем они будут рассмотрены в первую очередь. Последовательные звенья из R-, С- и L-элементов часто называют пассивными последовательными корректирующими устройствами, так как они не содержат источников электродвижущих сил. Существует весьма большое количество пассивных последовательных звеньев. В некоторых книгах и справочниках приводятся таблицы, содержащие схемы десятков и даже сотен звеньев различного вида. Пассивные дифференцирующие звенья подавляют низкие частоты и вносят положительный фазовый сдвиг. Подавление низких частот обычно недопустимо, так как снижает результирующий общий коэффициент усиления и увеличивает ошибки системы регулирования. Пассивные интегрирующие звенья подавляют усиление на высоких частотах и вносят в некотором интервале частот отрицательный фазовый сдвиг. Интегро-дифференцирующие звенья подавляют усиление в некотором интервале «средних» частот, а вносимый фазовый сдвиг вначале отрицателен, затем с ростом частоты становится нулевым. При дальнейшем росте частоты фазовый сдвиг становится положительным. Электрическая схема пассивного дифференцирующего звена:
Передаточная функция пассивного дифференцирующего звена:
Параметры:
Частотные характеристики пассивного дифференцирующего звена:
ЛАФЧХ пассивного дифференцирующего звена:
Электрическая схема пассивного интегрирующего звена:
Передаточная функция пассивного интегрирующего звена:
Параметры:
Частотные характеристики пассивного интегрирующего звена:
ЛАФЧХ пассивного дифференцирующего звена:
3. ЗАДАНИЕ И ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
1. Ознакомиться с теоретическими сведениями. 2. Используя пакет прикладных программ MatLAB промоделировать структурную схему следящей системы (рис.4), в соответствии с исходными данными варианта (см. п.4).
3. Провести моделирование по заданной структурной схеме, получить и проанализировать графики переходного процесса, АФЧХ, ЛАЧХ и ЛФЧХ. 4. Используя пакет прикладных программ MatLAB промоделировать скорректированную структурную схему системы с жесткой отрицательной обратной связью по скорости (рис.5). 5. Записать и проанализировать результаты моделирования, сравнивая их с результатами расчета переходного процесса, АФЧХ, ЛАЧХ и ЛФЧХ для нескорректированной системы.
4. КОНТРОЛЬНЫЕ ВОПРОСЫ
7. Поясните принцип работы рассматриваемой следящей системы с асинхронным двухфазным двигателем. 8. Что такое структурная схема системы? В чем ее принципиальное отличие от функциональной схемы? 9. Что такое передаточная функция системы? Как она может быть получена? 10. Что показывают ЛАЧХ и ЛФЧХ? 11. Поясните физический смысл АФЧХ. 12. Для чего в систему вводятся корректирующие устройства? Какие виды корректирующих устройств вы знаете?
5. БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Теория систем автоматического регулирования. Бесекерский В.А., Попов Е.П. Изд. - 4-е переработанное и дополненное. - СПб: «Профессия», 2003. – 752 с.
Лабораторная работа №6 Параллельные корректирующие устройства 1.Цель работы Закрепление теоретических сведений, получение практических навыков моделирования типовых динамических звеньев, анализ полученных результатов моделирования.
2. ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ Как уже отмечалось ранее параллельные корректирующие устройства удобно применять при использовании сложных законов управления, когда наряду с основным сигналом вводятся его производные или интегралы. Введение интегралов преследует цель снижения установившейся ошибки. Этот вопрос был рассмотрен ранее в связи с повышением точности систем автоматического регулирования посредством использования изодромных устройств. Введение производных преследует обычно цель обеспечения устойчивости. В этом случае используются звенья дифференцирующего типа, включаемые параллельно основной цепи. Варианты параллельного включения дифференцирующих звеньев показаны на рис. 1. Получение производной второго порядка при помощи одного звена является затруднительным. Поэтому схема, изображенная на рис. 1, б используется редко.
Рис.1. Введение второй производной дополнительно к первой производной осуществляется обычно по каскадным схемам, изображенным на рис. 1,в и 1,г. Для первой из них (рис. 20.1,в) результирующая передаточная функция будет
а для второй
На рис.1 дифференциаторы изображены идеальными. Более вероятно, что они будут представлять собой дифференцирующие звенья с замедлением. Заметим, что введение параллельных корректирующих звеньев, представляющих собой интеграторы, соответствует поднятию нижних частот. Введение параллельных корректирующих звеньев, представляющих собой дифференциаторы, соответствует поднятию верхних частот. Обратные связи Обратные связи могут быть положительными и отрицательными. Кроме того обратные связи могут быть жесткими и гибкими. Для уяснения последнего рассмотрим передаточную функцию, записанную для случая отрицательной обратной связи. Из этого выражения найдем передаточную функцию для установившегося режима, для чего необходимо положить р = 0:
Здесь может быть два случая. Если выполняется условие Wос(0) = 0, что будет при использовании в цепи обратной связи дифференцирующих элементов, то в установившемся режиме Wск(0) = Wс(0). Это означает, что в этом режиме передаточная функция цепи, охваченной обратной связью, будет равна передаточной функции исходной цепи. Такая обратная связь называется гибкой. Нетрудно видеть, что гибкая обратная связь действует только в переходных режимах, а в установившемся режиме она как бы отключается. Если Wос (0) Заметим, что случай, когда звено, охватываемое обратной связью, относится к числу интегрирующих звеньев и Wс(0) ® На рис. 2, а и 2, б изображены примеры гибкой и жесткой отрицательных обратных связей.
Рис.2. Обратной связью замыкается апериодическое звено с передаточной функцией
В первом случае (рис. 20.2,а) обратная связь представляет собой дифференцирующее звено с замедлением (например, дифференцирующий конденсатор) с передаточной функцией
Результирующая передаточная функция
Результирующий коэффициент передачи в установившемся состоянии равен kc так же как и в исходном апериодическом звене. Таким образом, эта обратная связь является гибкой. Наличие дифференцирующего элемента в цепи обратной связи и привело к получению гибкой обратной связи.
Во втором случае (рис. 2,б) обратная связь представляет собой апериодическое звено с передаточной функцией
Результирующая передаточная функция
представляет собой новое значение коэффициента передачи звена, замкнутого обратной связью. В рассмотренном случае обратная связь является жесткой, так как она изменяет коэффициент передачи звена в установившемся состоянии. Весьма важным является случай, когда цепь обратной связи представляет собой идеальное безынерционное звено с передаточной функцией Wос(р) = koc. Этот случай легко получить из последних равенств, положив в них Т ос == 0. В результате для апериодического звена, замкнутого такой отрицательной обратной связью, получим
Из этих выражений видно, что подобная отрицательная обратная связь уменьшает коэффициент передачи и постоянную времени апериодического звена в 1 + kc koc раз, где kc koc представляет собой коэффициент передачи по петле обратной связи. На первый взгляд здесь имеет место полная аналогия со случаем уменьшения постоянной времени и коэффициента передачи звена в одинаковое число раз при помощи пассивного дифференцирующего звена. Однако это не так. Если рассмотреть случай двух апериодических звеньев первого порядка с одинаковыми постоянными времени T’о = Т"о = Tо, включенных последовательно, то, как нетрудно показать, для уменьшения суммы постоянных времени Т’0 + Т’’0 = 2Т0 в п раз при помощи пассивных дифференцирующих звеньев необходимо подавить результирующий коэффициент передачи в п2 раз. При решении этой же задачи посредством использования жесткой обратной связи, охватывающей сразу оба звена, получится снижение результирующего коэффициента передачи только в п раз. Задача снижения суммы постоянных времени звеньев, входящих в систему регулирования, встречается в практике довольно часто. Это делает применение обратных связей обычно более предпочтительным. В динамическом отношении отрицательные обратные связи могут оказывать самое различное действие. Однако, подобно тому как это было сделано для последовательных корректирующих устройств, можно выделить три основных вида отрицательных обратных связей: 1) обратные связи, подавляющие высокие частоты (аналоги пассивного последовательного интегрирующего звена); 2) обратные связи, подавляющие низкие частоты (аналоги пассивного последовательного дифференцирующего звена); 3) обратные связи, подавляющие средние частоты (аналоги пассивного последовательного интегро-дифференцирующего звена). Установить аналогию обратной связи с тем или иным последовательным корректирующим звеном можно при помощи формул перехода. Особенно важно иметь возможность перехода от последовательного корректирующего звена к эквивалентной обратной связи. Это определяется тем, что расчетным путем наиболее просто определить параметры последовательного корректирующего звена, а с точки зрения технического осуществления наиболее удобны обратные связи.
3. ЗАДАНИЕ И ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
1. Ознакомиться с теоретическими сведениями. 2. Используя пакет прикладных программ MatLAB промоделировать структурную схему следящей системы (рис.4), в соответствии с исходными данными варианта (см. п.4). 3. Провести моделирование по заданной структурной схеме, получить и проанализировать графики переходного процесса, АФЧХ, ЛАЧХ и ЛФЧХ. 4. Используя пакет прикладных программ MatLAB промоделировать скорректированную структурную схему системы с жесткой отрицательной обратной связью по скорости (рис.5). 5. Записать и проанализировать результаты моделирования, сравнивая их с результатами расчета переходного процесса, АФЧХ, ЛАЧХ и ЛФЧХ для нескорректированной системы.
4. КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Поясните принцип работы рассматриваемой следящей системы с асинхронным двухфазным двигателем. 2. Что такое структурная схема системы? В чем ее принципиальное отличие от функциональной схемы? 3. Что такое передаточная функция системы? Как она может быть получена? 4. Что показывают ЛАЧХ и ЛФЧХ? 5. Поясните физический смысл АФЧХ. 6. Для чего в систему вводятся корректирующие устройства? Какие виды корректирующих устройств вы знаете?
5. БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Теория систем автоматического регулирования. Бесекерский В.А., Попов Е.П. Изд. - 4-е переработанное и дополненное. - СПб: «Профессия», 2003. – 752 с.
Лабораторная работа №7 Синтез САР методом ЛАЧХ
1.Цель работы Закрепление теоретических сведений, получение практических навыков моделирования типовых динамических звеньев, анализ полученных результатов моделирования.
2. ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ Наиболее приемлемы для целей синтеза логарифмические амплитудные характеристики, так как построение л. а. х., как правило, может делаться почти без вычислительной работы. Особенно удобно использовать асимптотические л. а. х. Процесс синтеза обычно включает в себя следующие операции. 1. Построение желаемой л.а.х. Построение желаемой л. а. х. делается на основе тех требований, которые предъявляются к проектируемой системе регулирования. При построении желаемой л. а. х. необходимо быть уверенным, что вид амплитудной характеристики полностью определяет характер переходных процессов и нет необходимости вводить в рассмотрение фазовую характеристику. Это будет выполняться в случае минимальнофазовых систем. В этом случае амплитудная характеристика однозначно определяет вид фазовой характеристики. Напомним, что передаточная функция разомкнутой минимально-фазовой системы не должна иметь нулей и полюсов, расположенных в правой полуплоскости. 2. Построение располагаемой л.а.х. Под располагаемой л. а. х. понимается характеристика исходной системы регулирования, построенной исходя из требуемых режимов стабилизации или слежения, требуемых выходной мощности, скорости, ускорения и т. п. Обычно под исходной системой понимается система, состоящая из регулируемого объекта и регулятора и не снабженная необходимыми корректирующими средствами, обеспечивающими требуемое качество переходного процесса. Исходная система должна быть также минимально-фазовой. 3. Определение вида и параметров корректирующего устройства. Наиболее просто определяется корректирующее устройство последовательного типа. Если желаемая передаточная функция разомкнутой системы — Wж(p), располагаемая — Wр(р) и передаточная функция корректирующего звена последовательного типа — Wпз(р), то можно записать равенство
Для л. а. х. можно записать
Таким образом, при использовании л. а. х. весьма легко осуществляется синтез последовательных корректирующих средств, так как л. а. х. корректирующих средств получается простым вычитанием ординат располагаемой л. а. х. из ординат желаемой. 4. Техническая реализация корректирующих средств. По виду л. а. х. необходимо подобрать схему и параметры корректирующего звена последовательного типа. В случае необходимости последовательное звено может быть пересчитано на эквивалентное параллельное звено или эквивалентную обратную связь. 5. Поверочный расчет и построение переходного процесса. В случае необходимости полученная система регулирования вместе с корректирующими средствами может быть исследована обычными методами анализа. В основу синтеза положены следующие показатели качества: 1) перерегулирование s% при единичном ступенчатом воздействии на входе; 2) время переходного процесса tп ; 3) коэффициенты ошибок С1 и С2 /2.
3. ЗАДАНИЕ И ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
1. Ознакомиться с теоретическими сведениями. 2. Провести синтез ЛАФЧХ системы заданной преподавателем. 3. Провести моделирование по заданной структурной схеме, получить и проанализировать графики переходного процесса, АФЧХ, ЛАЧХ и ЛФЧХ. 4. Используя пакет прикладных программ MatLAB промоделировать скорректированную структурную схему системы с жесткой отрицательной обратной связью по скорости. 5. Записать и проанализировать результаты моделирования, сравнивая их с результатами расчета переходного процесса, АФЧХ, ЛАЧХ и ЛФЧХ для нескорректированной системы.
4. КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Поясните принцип работы рассматриваемой следящей системы с асинхронным двухфазным двигателем. 2. Что такое структурная схема системы? В чем ее принципиальное отличие от функциональной схемы? 3. Что такое передаточная функция системы? Как она может быть получена? 4. Что показывают ЛАЧХ и ЛФЧХ? 5. Поясните физический смысл АФЧХ. 6. Для чего в систему вводятся корректирующие устройства? Какие виды корректирующих устройств вы знаете?
5. БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Теория систем автоматического регулирования. Бесекерский В.А., Попов Е.П. Изд. - 4-е переработанное и дополненное. - СПб: «Профессия», 2003. – 752 с.
Лабораторная работа №8 Особенности динамики нелинейных систем управления
1.Цель работы Закрепление теоретических сведений, получение практических навыков моделирования типовых динамических звеньев, анализ полученных результатов моделирования.
2. ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ При анализе и синтезе технических систем их стремятся описать линейными звеньями. Однако это не всегда возможно сделать, поскольку при этом могут теряться важные особенности поведения системы. Существенные для данной системы нелинейности могут неизбежно получаться в технических устройствах. Но могут быть и нелинейности, специально вводимые в систему для улучшения тех или иных ее характеристик. Нелинейности можно разделить на статические и динамические. В статических нелинейностях выходная величина зависит только от самой входной величины. В динамических нелинейностях выходная величина зависит также и от производных входной величины. Статические нелинейности могут быть непрерывными или релейными. В общем виде статические нелинейности можно обозначить как y=F(x), где x – входная а y – выходная величина. Динамические нелинейности, зависящие еще и от первой производной входной величины, будем обозначать как y=F(x, px), где p – символ дифференцирования. Рассмотрим наиболее часто встречающиеся в технических системах нелинейности.
Нелинейности релейного типа Характеристика релейного звена общего вида показана на рис. 1.
b1 b2 x
Рис.1. Релейная характеристика.
Аналитически релейную характеристику можно описать следующей системой уравнений:
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-12-30; просмотров: 704; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.218.38.125 (0.112 с.) |











 (1)
(1) (2)
(2) (3)
(3) 0, то обратная связь действует не только в переходном, но и в установившемся режиме. В этом случае обратная связь называется жесткой.
0, то обратная связь действует не только в переходном, но и в установившемся режиме. В этом случае обратная связь называется жесткой. не вносит особенностей. Здесь по-прежнему условие Wос(0) = 0 будет соответствовать случаю гибкой обратной связи, так как числитель (20.3) будет стремиться к бесконечности быстрее, чем знаменатель, и результирующая передаточная функция Wск(0) ®
не вносит особенностей. Здесь по-прежнему условие Wос(0) = 0 будет соответствовать случаю гибкой обратной связи, так как числитель (20.3) будет стремиться к бесконечности быстрее, чем знаменатель, и результирующая передаточная функция Wск(0) ® 








 F(x)
F(x)

 c
c
 (1)
(1)


