Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Некоторые типы подруливающих устройств.Содержание книги
Поиск на нашем сайте
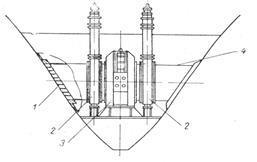
А. Прямой канал.
В канале 1 на шести кронштейнах 4 размещается электродвигатель 3, на валу которого закреплён винт 2 симметричного профиля. Корпус электродвигателя выполняется обтекаемой формы. Внутри корпуса создаётся избыточное давление дистиллированной водой или воздухом для предотвращения попадания забортной воды. Питание электродвигатель получает по кабелям, проложенным в кронштейнах. Величина и направление упора подруливающего устройства регулируется соответственно изменением числа оборотов и реверсированием электродвигателя. Электродвигатель может устанавливаться в канал из специального помещения в корпусе судна вместе со съемной частью канала и рамой или через бортовые отверстия канала. При проектировании подруливающего устройства с водопогружными электродвигателями проектанты обычно сталкиваются с рядом существенных трудностей, которые объясняются сравнительно большим числом оборотов и значительной длиной электродвигателя. Ввиду большого числа оборотов электродвигателя требуется применение гребного винта небольшого диаметра. При этом диаметр корпуса водопогружного электродвигателя достигает 60% диаметра канала, что снижает гидродинамические качества подруливающего устройства, а величина упора на правый и левый борт оказывается неодинаковой. С целью уменьшения сопротивления гондолы иногда применяют местное расширение канала.
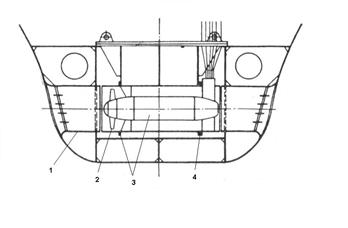
В тех случаях, когда требуется большая мощность (больше 200-250 кВт) могут установить два подруливающих устройства, каждое из которых развивает часть потребной тяги, как это сделано на научно-исследовательском судне «Академик Курчатов».
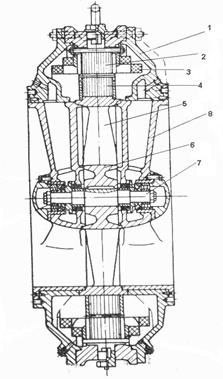
Желание уменьшить длину электродвигателя для размещения его в узкой носовой части судна привело к созданию кольцевого водопогружного электродвигателя. Асинхронный короткозамкнутый электродвигатель выполнен в виде единого двигательно-движительного агрегата с кольцевым ротором, внутри которого размещён четырёхлопастной гребной винт.
1 -корпус электродвигателя; 2 -пакет статора; 3 -обмотки статора; 4 -пакет ротора; 5 -ротор-винт; 6 -ступица; 7 -вал; 8 -кронштейн.
Ротор-винт закреплён на валу, который вращается на конических роликоподшипниках. Корпуса подшипников уплотнены манжетами и крепятся к корпусу статора электродвигателя полыми кронштейнами, через которые подводится масло для смазки подшипников. Давление масла несколько превышает давление воды. Охлаждение статора и ротора электродвигателя осуществляется забортной водой. По обоим бортам установлены клинкетные задвижки, позволяющие демонтировать двигатель без постановки судна в док. К недостаткам этой конструкции относятся повышенные потери энергии на трение ротора о воду, а также возможность повреждения статорной обмотки механическими частицами, содержащимися в воде. Установлены на судах типа «Валерий Чкалов» и «Родина» постройки ГДР. Мощность ПУ 70 ЛС. Рассмотренные конструкции имеют следующие общие недостатки: - относительно большой размер (корпуса) электродвигателя приводит к уменьшению дискового отношения винта и снижению кпд; - момент сопротивления изменяется по винтовой характеристике, что усложняет пуск и реверс асинхронного двигателя; - регулирование частоты вращения (изменение упора) возможно только частотным регулированием; - низкая надежность.
|
||||
|
|
Последнее изменение этой страницы: 2016-12-30; просмотров: 865; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.27 (0.006 с.) |

 Подруливающие устройства с водопогружными электродвигателями.
Подруливающие устройства с водопогружными электродвигателями.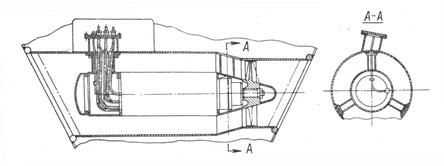
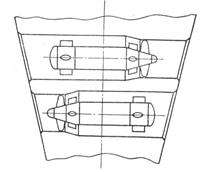 С целью получения одинакового упора на правый и левый борт, гребные винты установлены по разные стороны от диаметральной плоскости судна. Лопасти винтов имеют несимметричный профиль и при работе обоих подруливающих устройств на один борт один из винтов работает на передний, а другой на задний ход.
С целью получения одинакового упора на правый и левый борт, гребные винты установлены по разные стороны от диаметральной плоскости судна. Лопасти винтов имеют несимметричный профиль и при работе обоих подруливающих устройств на один борт один из винтов работает на передний, а другой на задний ход.