Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Система автоматического регулирования давления ⇐ ПредыдущаяСтр 3 из 3
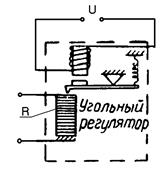
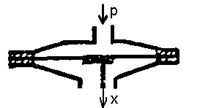
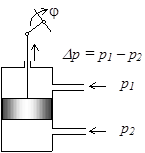
На рис. 28 показана система автоматического регулирования давления. Датчик давления 2 настроен на определенное давление в ресивере 1. При отклонении давления pk от заданного значения мембрана датчика 2 прогибается и через шток смещает трубку струйного усилителя 3. В результате возникает разность давлений в цилиндре гидравлического двигателя 4 и поршень двигается, поворачивая заслонку 5, таким образом изменяется подача газа, чтобы привести давление pk к заданному значению. Работа мембранного датчика с трубкой струйного усилителя описывается уравнением x = kM Δp, где x – смещение конца струйной трубки, Dp – отклонение давления от заданного, которое определяется настройкой датчика, kM – коэффициент пропорциональности. Блок-схема системы представлена на рис. 29. Исходные данные приведены в табл. 14.
Таблица 14 Исходные данные
Уравнения элементов САУ Ниже приведены уравнения элементов систем автоматического управления, которые используются при построении систем в вариантах заданий п. 2.
Контрольные вопросы
1. Как получить передаточную функцию САУ, зная ее дифференциальное уравнение? 2. Как получить дифференциальное уравнение САУ, зная ее передаточную функцию? 3. В чем отличие между передаточными функциями разомкнутой и замкнутой системами? 4. Как получить передаточную функцию САУ по ее структурной схеме? 5. Что называют амплитудно-частотной характеристикой (АЧХ)? 6. Что такое фазо-частотная характеристика (ФЧХ)? 7. Как построить амплитудно-фазовую характеристику (АФХ)? 8. Чем отличаются частотные характеристики (АЧХ и ФЧХ) от логарифмических частотных характеристик (ЛАЧХ и ЛФЧХ)? 9. Что такое переходная характеристика? 10. Как составляется главный определитель Гурвица? 11. Какую передаточную функцию (замкнутой или разомкнутой системы) необходимо использовать в критерии а) Гурвица? б) Михайлова? в) Найквиста? 12. Каким образом судить об устойчивости по кривой Михайлова? 13. Как должна проходить АФХ разомкнутой системы, чтобы САУ была устойчивой? 14. Как определить частоту среза системы? 15. Как найти запасы устойчивости а) по АФХ системы? б) по ЛЧХ? 16. Что называют коэффициентами ошибок? 17. Как их определить? 18. Как найти установившуюся ошибку, если известны коэффициенты ошибок? 19. Как определить а) время регулирования САУ? б) перерегулирование? в) колебательность переходного процесса?
Библиографический список 1. Иващенко Н. Н. Автоматическое регулирование. Теория и элементы систем. М.: Машиностроение, 1978. – 736 с. 2. Егоров К.В. Основы теории автоматического регулирования. М.: Энегрия, 1967. – 648 с. 3. Теория автоматического управления / Под ред. Соломенцева Ю.М., М.: Высшая школа, 2000.– 268 с.
4. Теория автоматического управления / Под ред. Нетушил А.В., М.: Высшая школа, 1976.– 400 с. 5. Попов Е.П. Теория линейных систем автоматического регулирования и управления. М.: Наука, 1989.– 301 с. 6. Аверьянов Г.С., Туровец А.Г., Яковлев А.Б. Управление в технических системах. Омск: ОмГТУ, 2000.– 80 с.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-01-20; просмотров: 320; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.144.202.167 (0.01 с.) |