Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Міністерство освіти і науки україни національний технічний університет україни «київський політехнічний інститут»Стр 1 из 6Следующая ⇒
МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ УКРАЇНИ «КИЇВСЬКИЙ ПОЛІТЕХНІЧНИЙ ІНСТИТУТ»
МЕТОДИЧНІ ВКАЗІВКИ
до виконання лабораторних робіт з курсу «ДЕТАЛІ МАШИН»
для студентів механічних спеціальностей усіх форм навчання
Затверджено Методичною радою НТУУ «КПІ»
Київ «Політехніка» Р. ЛАБОРАТОРНА РОБОТА №1
Вивчення конструкції та визначення основних параметрів циліндричного зубчастого редуктора та його деталей
Мета роботи- вивчити за досліджуваним зразком і кресленням конструкцію циліндричного зубчастогоредуктора та його деталей, а також основні геометричні, кінематичні та силові параметри; скласти технічну характеристику та технічні вимоги, вивчити структуру специфікації.
Теоретичні відомості
Загальні відомості
Редуктори- це зубчасті механізми з постійним передаточним числом,призначені для зниження кутовоїшвидкості та збільшення обертального моменту і всиновлені в закритих корпусах. Редуктори називають циліндричними,якщо вони містять ті льки циліндричні зубчасті передачі, конічними -тільки конічні,а черв’ячними -тільки черв’ячні. Назви редукторів з різними передачами складаються з назв передач, що містять редуктори в напрямі зменшення кутової швидкості та збільшення обертального моменту, наприклад, конічно-циліндричний редуктор, черв’ячно-циліндричний редуктор. Пара зубчастих коліс, що знаходиться в зачепленні, складає ступінь редуктора. Якщо редуктор містить один, два і більше ступенів то його називають одно-, дво- або багатоступінчастим.
Редуктори. що містять зубчасті колеса з рухомими осями, називають планетарними. Вони характеризуються малою масою, але їх виготовлення складніше за виготовлення звичайних редукторів.
Основні геометричні, кінематичні та силові параметри циліндричних зубчастих редукторів
Геометричні параметри
1. Модулі прямозубих зубчастих коліс у загальному вигляді визначають за формулою
де і -номер ступеня редуктора (зазвичай і =1,2,3); a wi - між осьова відстань і -го ступеня; zci - сумарне число зубців зубчастих коліс і -го ступеня. Значення модулів прямозубих зубчастих коліс mi повині відповідати стандартним.
2. Модулі торцеві mt і нормальні mn косозубих зубчастих визначають за формулами:
mn = mt cosβi, де βi - кут нахилу лінії зубців зубчастого колеса і -го ступеня, який вимірюють за допомогою кутомірів і універсальних мікроскопів. Кут βi визначають за формулою βi = arccos bi,
li
штангенциркулем. Розраховані значення нормальних модулів mn для косозубих коліс повинні відповідати стандартним
значенням. Кут βi уточнюють за формулою βi = arccos mni mti
3. Ділильний діаметр зубчастого колеса: для прямозубих шестерні та колеса di =mi zi; d′i = miz′i;
для косозубих шестерні та колеса di = mti zi; d′i = mti z′i, де zi та z′i - числа зубців шестерні та колеса і -го ступеня.
Кінематичні параметри
- 1 - 1. Передатне число ступеня
2. Передатне число редуктора up = u1u2...ui,
де u1, u2...ui - передатні числа окремих ступенів редуктора. 3. Колова швидкість коліс vi, м с
vi = πmti zini , 60 ⋅1000
Силові параметри
1. Коефіцієнт корисної дії (ККД) редуктора
ηp = η1η2...ηiηok, де η1η2...ηi - ККД передач окремих ступенів редуктора; ηo - ККД, що враховує втрати в опорах, k- кількість валів
або пар підшипників. 2. Орієнтована потужність, яку можна передати за умови міцності вала н кручення
P = n1 d1 3 , 14
де Р- передавана потужність, кВт; n1- частота обертання швидкохідного вала, хв-1; d1- діаметр вихідного кінця швидкохідного вала, см.
3. Обертальний момент на валах Ti, H ⋅м
5. Радіальна сила в зачепленні коліс Fri, Н
Fri = Fti tgαw , cosβi
6. Осьова сила в зачепленні коліс
Fai = Fti tgβi .
Конструкція редуктора
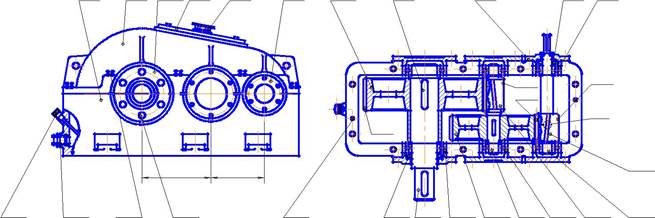
Редуктор (рис. 1.1) складається з корпуса 1, кришки корпуса 2, зубчастих коліс z1- z4, швидкохідного 11, проміжного 12 і тихохідного 16, валів, які монтують на підшипники 9, 13 і 18, що закриваються глухими 5 та наскрізними 7 і 24 кришками підшипників. Шестерні 10 і 14 у зв’язку з малими діаметрами виконано як одне ціле з ведучим валом 11 і проміжним валом 12, які в таких випадках називають валами-шестернями. Колесо 15, установлене на проміжному валу 12, зачіплюється з валом-шестернею 10, а вал-шестерня 14-з колесом 19, посадженим на тихохідний вал 16. Зубчасті колеса15 і 19 зв’язані з валами шпонками 6. Усі підшипники змонтовано в гніздах корпусу, створених розточкою циліндричних отворів рознімних на площині осей валів корпусу 1 і кришки 2, з’єднаних між собою за допомогою гвинтів 22. Кришка з корпусом може з ’єднуватися також болтами або шпильками. Площину рознімання необхідно добре спланерувати, оскільки під час складання її покривають шаром рідкого скла або шелаку. Для точного фіксування взаємо розміщення кришки і корпусу у площині рознімання встановлено два встановлювальних штифта 26.
- 2 -
A
19 6 7 8 9
Б
l
i
bi
b i
Рис. 1.1 Креслення редуктора
У корпус заливають мастило для змащування зубчастих коліс і підшипників. Існують різні способи мащення зубчастих коліс і підшипників, наприклад картерне змащування зубчастих коліс здійснюється зануренням їх у мастило, яке знаходиться в нижній частині корпусу.
Найпростіше мащення підшипників здійснюють розбризкуванням мастила із загальної масляної ванни зубчастими колесами або спеціальними дисками. З боків кришки 2 передбачено двоє вушок для зручності підйому та транспортування редуктора вантажопідйомними машинами. З верху в ній є оглядовий люк для заливання мастила та огляду передач. Люк закривається кришкою 3, закріпленою гвинтами 23. Віддушина 4 служить для виходу повітря, яке розширюється внаслідок виділення тепла і може спричинити до виділення мастила через ущільнення. У корпус загвинчено мастилопоказчик 20, необхідний для контролю рівня мастила, і пробку 21-для зливання мастила.
Наскрізні 7, 24 іглухі 5 кришки підшипників прикріплено до корпусу редуктора за допомогою гвинтів 25.
У наскрізні кришки встановлено ущільнення 8 і 17, які запобігають витіканню мастила з редуктора, також проникненню в середину абразивних частинок і бруду з навколишнього середовища.
У цьому редукторі застосовують гумові манжетні ущільнення, які широко застосовують в машинобудуванні. Крім них застосовують інші типи ущільнень, наприклад, сальникові, лабіринтні.
Порядок виконання роботи
1. Вивчити конструкцію редуктора та його деталей; 2. Визначити основні параметри редуктора та занести їх у табл. 1.1 і 1.2; 3. Ознайомитися зі структурою складального креслення (рис. 1.1) та специфікацією на редуктор (табл. 1.3);
4. Сформулювати «Технічну характеристику» та «Технічні вимоги» на редуктор. Зробити висновки з роботи; 5. Оформити звіт про роботу.
Зміст звіту
1. Назва і мета лабораторної роботи; 2. Кінематична схема редуктора (рис.1.2); 3. Результати вимірювання і розрахунків параметрів редуктора (табл.1.1 і 1.2); 4. Специфікація деталей редуктора; 5. Технічна характеристика та технічні вимоги до редуктора;
- 3 -
T1
Рис. 1.2 Кінематична схема редуктора
Таблиця 1.1 Результати вимірювань і розрахунків основних геометричних параметрів редуктора
Таблиця 1.2.1
Продовження таблиці 1.2.1
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-01-19; просмотров: 41; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.190.207.144 (0.059 с.) |
 де bi і li ширина вінця і довжина лінії зубця колеса і -го ступеня. Розміри bi і li вимірюють
де bi і li ширина вінця і довжина лінії зубця колеса і -го ступеня. Розміри bi і li вимірюють
 де ni - частота обертання вала, хв-1.
де ni - частота обертання вала, хв-1. де αw - кут зачеплення αw = 20°; βi - кут нахилу лінії зубців зубчастого колеса і -го ступеня.
де αw - кут зачеплення αw = 20°; βi - кут нахилу лінії зубців зубчастого колеса і -го ступеня.