Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Взаимное пересечение многогранниковСодержание книги
Поиск на нашем сайте
Линия пересечения двух многогранников может быть построена двумя способами. Первый способ состоит в определении точек пересечения ребер первого многогранника с гранями второго многогранника и ребер второго с гранями первого, т.е. задача сводится к многократному решению задачи по определению точки пересечения прямой с плоскостью. Второй способ состоит в определении линий пересечения граней одного многогранника с гранями другого. Задача сводится к определению линии пересечения двух плоскостей. Преимущество отдается тому из способов, который в зависимости от условия задания дает наиболее простое и точное решение. Эти два способа построения линии пересечения двух многогранников часто комбинируют между собой. Линия пересечения двух многогранников представляется в общем случае в виде пространственных замкнутых ломаных линий. В зависимости от вида многогранников и их взаимного расположения линией пересечения может быть одна, две и более ломаных линий (в частности могут быть и плоские ломаные линии). Отрезки ломаных линий являются отрезками прямых, по которым пересекаются грани двух многогранников. Вершины ломаной линии этой точки пересечения ребер одного многогранника с гранями другого, и ребер второго с гранями первого. Отрезки ломаной линии строятся как отрезки прямых, соединяющих только те пары вершин, которые принадлежат одной и той же грани первого многогранника, а также одной грани второго многогранника. Вершины ломаной линии соединяются при строгом соблюдении последовательности. Задача: Построить линию пересечения прямой четырехугольной призмы с треугольной пирамидой (рис.5.9).
Рис. 5.9. Построение линии пересечения пирамиды и призмы
Решение: Призма своим основанием стоит на горизонтальной плоскости проекций Н. Горизонтальные проекции ее вертикальных ребер вырождаются в точки. Грани боковой поверхности призмы проецируются в отрезки прямых. Линия пересечения многогранников определяется по точкам пересечения ребер каждого из них с гранями другого многогранника. Так, ребро SA пирамиды пересекается с двумя вертикальными гранями призмы в точках 1 (1V,1H) и 2 (2V,2H). Ребро SB пирамиды пересекает две вертикальные грани призмы в точках 3(3V,3H) и 4(4V, 4H) и ребро SC – в точках 5(5V, 5H) и 6(6V, 6H). Из четырех вертикальных ребер призмы только одно пересекает пирамиду. Находим точки его пересечения с гранями пирамиды. Через это ребро и вершину S пирамиды проводим вспомогательную горизонтально проецирующую плоскость Q. На рис.5.9 показан горизонтальный след этой плоскости QH. Плоскость Q пересекает пирамиду по двум прямым линиям SK и SF, которые пересекаются с ребром призмы в точках 7(7V, 7H) и 8(8V, 8H). Последовательность построения точек 7V и 8V на рис.5.9 показана с помощью стрелок. Соединяя каждые пары точек, принадлежащих одной и той же грани, получаем две ломаные линии пересечения многогранников. Одна из них пространственная ломаная линия 137581, другая – треугольник 246 – плоская ломаная линия лежащая в грани призмы. Видимость линии определяем с помощью конкурирующих точек.
Развертки многогранников Совмещение всех граней многогранника с одной плоскостью путем последовательного вращения их вокруг ребер называется разверткой многогранника. Все грани многогранника на развертке изображаются в натуральной величине. Поэтому построение развертки сводится к построению натуральных величин граней многогранника. Их расположение и последовательность могут быть различны. Чтобы получить развертку выпуклого многогранника нужно на его поверхности провести линию разреза, которая должна удовлетворять трем условиям: 1) проходить через все вершины выпуклого многогранника; 2) не должна быть замкнутой; 3) состоять из связанных между собой участков (линия разреза должна представлять собой одну линию). Задача: Построить развертку прямой четырехугольной усеченной призмы, с основанием на плоскости Н, (рис. 5.10). Решение. 1. Определяем линию разреза многогранника для построения развертки (САВD4312). 2. Устанавливаем, что нижнее основание (АВСD) призмы изображено в натуральную величину на горизонтальной плоскости проекций, а ребра призмы изображены в натуральную величину на фронтальной плоскости проекций. 3. Определяем натуральную величину верхнего основания (сечения) призмы методом вращения вокруг проецирующей оси проходящей через точку 1 перпендикулярно плоскости V: (1\н, 2\н, 3\н, 4\н - натуральная величина сечения).
Рис. 5.10 – Построение развертки прямой четырехугольной усеченной призмы 4. Строим развертку призмы. На горизонтальной линии отложим отрезки DВ = DнВн; ВА = ВнАн; АС = АнСн; СD = СнDн (ширина каждой из боковых граней). На перпендикулярах к этим отрезкам откладываются величины ребер D4=Dv4v; В2=Вv2v; А1=Аv1v; С3=СvЗv. Многоугольник D42134D представляет собой развертку боковой поверхности призмы. Нижнее основание призмы, равное горизонтальной проекции его (АнВнDнСн) пристраивается, например, к стороне СD развертки боковой поверхности призмы. Натуральная величина основания (1н2’н3’н4’н) примыкает к развертке боковой поверхности стороной 24.
Глава 6. КРИВЫЕ ЛИНИИ 6.1. Основные определения и проекции кривых Кривая в начертательной геометрии определяется как множество последовательных положений точки, непрерывно перемещающейся в пространстве с изменением направления движения. Если движение точки изменяется по определенному закону, то кривая называется закономерной. Если движение произвольное, то получается кривая общего вида. Кривые линии могут быть плоскими и пространственными. У плоской кривой все точки инцидентны некоторой плоскости. Закономерные плоские кривые могут определяться своими уравнениями - алгебраическими (окружность, гипербола, эллипс, парабола и др.) или трансцендентными (спираль Архимеда, синусоида). Кривые общего вида могут задаваться только графически. Степень уравнения алгебраической кривой определяет ее порядок. Графически порядок кривой определяется количеством точек пересечения с прямой, причем точки берутся как действительные, так и мнимые. Порядок кривой сохраняется и у проекций кривой. Если спроецировать кривую b на плоскость Н по направлению S, то на ней получится проекция кривой bH, обладающая всеми свойствами, которые сохраняются при параллельном проецировании (см. рис.6.1).
Рис. 6.1 – Проекция кривой Рис. 6.2 – Касательная к B на плоскость Н кривой b
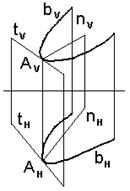
Касательной t к плоской кривой b в точке A называется предельное положение секущей t1, когда точки A1 и A2, оставаясь на кривой b, стремятся к точке A (рис.6.2). Нормалью n к кривой b в точке A называют прямую инцидентную плоскости P и перпендикулярную к касательной t в этой точке. К плоской кривой может быть проведена только одна нормаль. К пространственной кривой в данной точке можно провести бесчисленное множество перпендикуляров к касательной, которые определяют нормальную плоскость. Касательная к кривой в заданной точке проецируется в касательные к ее проекциям (tH; tv). Проекции нормали (nH; nV) (рис.6.3) не перпендикулярны к проекциям (tH; tv) на чертеже, если плоскость, в которой находится кривая – плоскость общего положения (см. рис. 6.1)
Рис. 6.3 – Проекция кривой b на эпюре Монжа
На кривой можно выделить обыкновенные, особые и экстремальные точки. Обыкновенная точка А кривой характеризуется тем, что направление движения точки по кривой и направление касательной остаются неизменными (см. рис. 6.2). Если же в данной точке меняется направление касательной или направление самой кривой, точка является экстремальной или особой. Рассмотрим некоторые из особых точек. 1.Точка перегиба E, в которой касательная и нормаль меняют направление, а кривая пересекает касательную (рис. 6.4а). 2. Вершина кривой B – точка, в которой нормаль является осью симметрии для некоторого участка кривой (рис. 6.4б). 3.Точки возврата O и C (клюв), в которых ветви кривой имеют общую касательную (рис. 6.4 в, г). 4. Двойная точка (F, F1), в которой кривая пересекает самое себя и меняется направление касательной (рис. 6.4 д, е).
Пространственные кривые Кривую, точки которой не лежат в одной плоскости, называют пространственной или линией двоякой кривизны. Пространственные кривые так же, как и плоские, могут быть закономерными или общего вида. К закономерным относятся винтовые линии (гелисы), которые широко применяются в технике, являясь определяющими поверхностей резьбы, червяков, пружин и т.п. Название винтовой линии определяется видом поверхности, по которой движется точка, образующая гелису. Цилиндрическая винтовая линия. Цилиндрическая винтовая линия представляет собой траекторию точки, равномерно движущейся по образующей цилиндра, которая, в свою очередь, равномерно вращается вокруг оси цилиндра.
Рис. 6.4. Особые точки на линии
Основными параметрами этой кривой являются: диаметр окружности цилиндра, шаг р винтовой линии, направление винтовой линии и угол подъема y. Шагом р называется расстояние, пройденное точкой по образующей цилиндра за один полный оборот по окружности. Шаг может быть постоянным и переменным. Если винтовая линия поднимается по видимой стороне цилиндра слева на право, то она правая. Угол подъема винтовой линии выражается формулой:
tg y= р/pd
где: р – шаг винтовой линии; d – диаметр основания цилиндра. Для построения проекций винтовой цилиндрической линии шаг (высота цилиндра) и окружность основания делятся на одинаковое число (n) равных частей. На рисунке 6.5 n=12. При перемещении на 1/12 часть по окружности точка переместится на (1/12) р (шага) по образующей цилиндра. Таким образом, фронтальные проекции точек гелисы получаются при пересечении горизонтальных прямых деления шага с линиями проекционной связи, проведенными из соответствующих точек деления окружности (см. рис.6.5). Так как ось цилиндра является горизонтально-проецирующей прямой, то горизонтальная проекция гелисы совпадает с окружностью основания цилиндра. Фронтальная проекция цилиндрической винтовой линии - синусоида.
Рис. 6.5. Цилиндрическая винтовая линия и ее развертка
Разверткой гелисы является гипотенуза прямоугольного треугольника, один из катетов которого равен шагу р, а второй – длине окружности основания цилиндра pd. Из этого треугольника определяется и угол y. Винтовая линия является линией кратчайших расстояний между двумя точками на поверхности цилиндра.
Глава 7. КРИВЫЕ ПОВЕРХНОСТИ Общие сведения Поверхность можно представить и как след, оставляемый линией при ее непрерывном движении в пространстве. Линию, которая перемещается в пространстве, называют образующей поверхности, а линии, которые определяют движение образующей – направляющими поверхности. Способ образования поверхности движением линии называется кинематическим, а поверхности, полученные этим способом – также кинематическими. Кинематический способ позволяет задать поверхность на чертеже минимальным числом линий и точек. Определитель поверхности должен включать условия, позволяющие задать данную поверхность на чертеже. Некоторые из параметров определителя могут быть заданы графически (вид и положение образующих или направляющих поверхности) или аналитически (величина радиуса сферы, угол наклона образующей конуса к его оси и т.п.), но кроме этих параметров необходимо задать еще способ (алгоритм) построения на чертеже точек и линий, принадлежащих поверхности. Таким образом, каждый определитель поверхности включает в себя графоаналитическую и алгоритмическую характеристику поверхности. Одна и та же поверхность может быть образована по различным законам, т.е. иметь несколько различных определителей. Определитель поверхности: F{l,i}[A1] Где {l,i} – графическая часть определителя; [A1] – алгоритм (закон) образования поверхности. Образующая поверхности может быть прямой и кривой линиями, постоянной и переменной. По виду образующей, поверхности делятся на линейчатые (прямо линейчатые) и не линейчатые (криво линейчатые). Направляющих может быть несколько или одна. Любая линейчатая поверхность должна иметь три направляющие. У кривых поверхностей направляющими являются также кривые. Поверхности разделяются на развертывающиеся и не развертывающиеся. Развертывающиеся поверхности могут быть совмещены с плоскостью без разрывов и складок. Их смежные образующие должны быть параллельными или пересекающимися прямыми. У не развертывающихся поверхностей смежные образующие должны быть скрещивающиеся прямые или кривые. Все не линейчатые поверхности – не развертывающиеся.
Поверхности вращения Поверхностью вращения называется поверхность, получаемая вращением какой-либо линии или кривой, как плоской, так и пространственной вокруг некоторой оси. Любая поверхность вращения может быть задана образующей l и осью вращения i. Определитель поверхности вращения: F{l,i}[A1], где [A1] –алгоритм образованияповерхности (вращения). Поверхность вращения задают на чертеже проекциями образующей и осью вращения,. Каждая точка образующей l описывает окружность h с центром на оси i (рис.7.1).
Рис. 7.1. Поверхность вращения на эпюре Монжа
Эти окружности лежат в плоскостях, перпендикулярных оси вращения, и называются параллелями. Обычно ось вращения направлена перпендикулярно к какой-либо плоскости проекции, поэтому параллели проецируются на эту плоскость в натуральную величину. Наибольшая из параллелей называется экватором, а наименьшая горлом. Плоскость, проходящая через ось вращения, называется меридиональной плоскостью, а линия ее пересечения с поверхностью вращения – меридианом. Меридиан, параллельный фронтальной проекции называется главным меридианом. Главный меридиан определяет очерк поверхности вращения на фронтальной плоскости проекций, а на горизонтальной плоскости проекций очерк поверхности ограничивается экватором hЭ, горлом hГ, верхней h1 и нижней h2 параллелями. Поверхность вращения называется закрытой, если меридиан является замкнутой кривой, пересекающей ось в двух точках. Каждая из параллелей пересекает меридиан под прямым углом, т.е. параллели и меридианы образуют прямоугольный каркас поверхности. Экватор hЭ является границей видимости поверхности вращения для горизонтальной плоскости проекций, а главный меридиан - для фронтальной плоскости проекций. К линейчатым поверхностям вращения относятся: цилиндрическая, коническая и однополостный гиперболоид вращения. Так как прямая безгранична, то линейчатые поверхности вращения ограничивают двумя параллельными плоскостями и получают тела вращения; цилиндр, однополостный гиперболоид, конус. У конуса вращения одна из ограничивающих плоскостей проходит через вершину. Если главным меридианом поверхности является кривая второго порядка, то поверхность называется поверхностью вращения второго порядка. Эти поверхности имеют общий определитель F{l2,i}[A1], где: l2 – кривая второго порядка; а i – ось вращения. Наиболее распространены следующие поверхности второго порядка, которые образуются при вращении: цилиндр – кривой второго порядка, распавшейся на две параллельные прямые; конус – кривой второго порядка, распавшейся на две пересекающиеся прямые; сфера – окружности вокруг оси, совпадающей с ее диаметром; эллипсоид – эллипса вокруг одной из его осей; параболоид – параболы вокруг ее оси. При вращении кривой второго порядка вокруг оси, не совпадающей с осью самой кривой, могут быть образованы поверхности вращения более высокого порядка. К таким поверхностям относится тор. Тором называется поверхность, образованная при вращении окружности вокруг оси, инцидентной ее плоскости, но не проходящей через центр. В зависимости от величины r – радиуса образующей окружности и расстояния R от ее центра до оси вращения возможны три варианта поверхности тора. Вариант 1: r<R –открытый тор или круговое кольцо (рис. 7.2). Вариант 2: r=R – закрытый тор (образующая касается оси). Вариант 3: r>R – закрытый тор (двуполостной). Определитель тора может быть задан двумя параметрами r и R. Ф{R, r}[А1] или Ф{(0, r) i }[А1], где: r – радиусобразующей окружности; 0 – центр этой окружности; i – ось вращения. Если нужно построить точку на поверхности вращения, то строят одну из параллелей (h) и на ней задают точку (например, точка L на рис. 7.2).
Рис. 7.2. Поверхность тора и точка L на ее поверхности
|
||
|
|
Последнее изменение этой страницы: 2016-12-16; просмотров: 598; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.15 (0.014 с.) |