Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Гусеничные машины с десятикатковой ходовой системой
Продолжение таблицы 3.4
Продолжение таблицы 3.4
* Знак "–" перед lТ ставится в том случае, когда точка приложения нагрузки расположена за задней опорой корпуса (см. рис. 3.1, г)
Окончание таблицы 3.4
Вопросы для самопроверки 1. К чему может привести теоретически необоснованная компоновка лесной машины? 2. В чем заключается сущность обобщенного метода решения задач по обоснованию компоновки проектируемых машин? 3. Какими критериями пользуются при оценке компоновки колесных лесных машин?
4. Какие конструктивные решения технологического оборудования применяются при проектировании лесных машин? 5. Какие методы применяются при переналадке колесных сельскохозяйственных тракторов в лесные? 6. Как определяются силы, действующие на корпус машины со стороны гусеничного движителя? 7. Какое влияние оказывает гусеница на нагруженность ходовой системы? 8. Каково отличие в методике определения опорных реакций под катком гусеничного движителя при восьми- и десятикатковых системах? 9. Как оценивается компоновка гусеничной машины? 10. Какими конструктивными мероприятиями можно улучшить компоновку лесных машин? 11. Как влияет на устойчивость лесной машины способ закрепления и размещения на ней пачки деревьев?
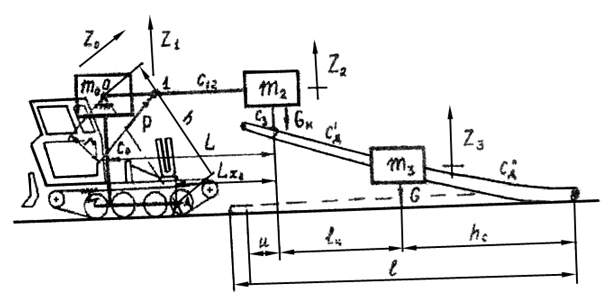
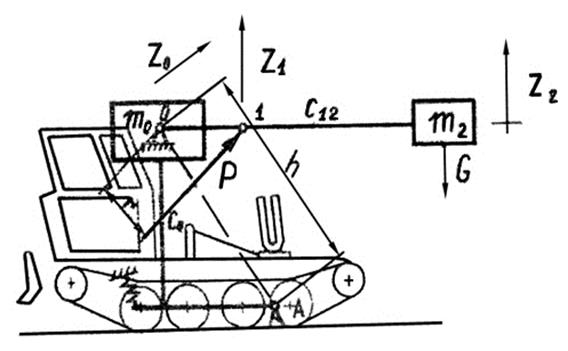
3.3. Контрольное задание № 2 3.3.1. Общие указания. Выполнение контрольной работы № 2 необходимо начинать с изучения теоретических основ динамики взаимодействия лесных машин с предметом труда, изложенных в [1, 3]. Задание на контрольную работу состоит из выбора расчетной схемы машины, режима ее работы, исходных данных и двух вопросов. Вид расчетной схемы и режим работы лесной машины студентами выбирается по табл. 3.5, самостоятельно, по начальной букве фамилии. Расчетные схемы приведены на рис. 3.2 – 3.5. Исходные данные, соответствующие расчетным схемам и заданным режимам работы, выбираются по табл. 3.6 – 3.10, по последней цифре шифра (номера зачетной книжки студента). Например, студенту Иванову Н.М. (шифр 27016) необходимо провести исследование характера и уровня динамических нагрузок на лесную машину в режиме подъема деревьев за комель и сосредоточенного груза, пользуясь, соответственно, трехмассовой и двухмассовой расчетными схемами при исходных данных по варианту 6 (см. табл. 3.6, 3.7). Вопросы для ответов выбираются по желанию.
Таблица 3.5
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-12-14; просмотров: 270; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.216.186.164 (0.011 с.) |
 0,72
0,72
 1,5
1,5
 0,345
0,345
 0,26
0,26