
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Машины и оборудование для уплотнения бетонных смесей.
При формовании железобетонных изделий и конструкций применяют различные способы уплотнения бетонной смеси: прессование - воздействие на бетонную смесь значительных давлений; центрифугирование - воздействие на бетонную смесь центробежной силы при производстве трубчатых изделий; вакуумирование отсасывание из бетонной смеси избыточной воды и воздуха; вибрирование - воздействие на бетонную смесь колебательных движений. Наиболее распространенный способ сочетания вибрации с прессованием - виброштампование - при производстве сборного железобетона или сочетание вибрации с вакуумированием вибровакуумирование при возведении монолитных конструкций, а также при производстве отдельных типов железобетонных изделий. Рассмотрим воздействие вибрации на процесс уплотнения бетонной Бетонная смесь представляет собой трехфазную грубодисперсную систему (твердая фаза - фракции щебня или гравия и песка, жидкая – це- ментный раствор, газообразная находящийся в массе смеси воздух 10... 15 % от объема смеси). В процессе уплотнения смесь разрушается и в конце его переходит в двухфазную систему (твердая + жидкая фазы) при содержании в ней воздуха не более 2...3%. В результате процесса виброуплотнения тело бетона (железобетона) получает однородную плотную структуру, что обеспечивает готовым железобетонным изделиям заданные физико- механические показатели.
Получение такой структуры уплотненного тела бетона может быть обеспечено только при правильной оценке динамического состояния системы в условиях вибрационное или других механических воздействий. Структура бетона в основном определяется её реологическими свойствами: вязкостью цементного раствора, силами трения и сцепления между частицами заполнителя, наличием тиксотропных превращений смеси, сохранением целостности упруговязких каналов цементного раствора. Для обеспечения управления данными реологическими свойствами необходимо правильно назначить вибрационный режим уплотняющей машины (устройства). Под вибрационным режимом понимают вид и характер колебаний, их направление относительно сечения уплотняемого тела бетона, а также колебательные параметры (угловая частота О) и амплитуда колебаний) и динамический режим работы машины. Бетонная смесь при уплотнении представляется в виде крупного заполнителя, окруженного раствором из мелких зерен, объединённых между собой поверхностными силами сцепления. Такая смесь будет обладать упруговязкими свойствами, и при небольших деформациях передача колебаний будет происходить по каналам, уподобляющимся пружинам с упруговязкой характеристикой. При этом частицы заполнителей, как правило, контактируют между собой через упруговязкие каналы и, в отдельных случаях, непосредственным контактом. Колебания перегородки 1 (рисунок 48) передадутся частице А1. В свою очередь частица A1 передаст колебания частице А2 непосредственным контактом и частицам А3, А 4 через упруговязкие канаты и т.д. Такая взаимосвязь частиц А заполнителей исключает возможность их изолированного колебания. Возбужденные частицы А заполнителей колеблются вынужденной частотой вибровозбудителя, но с различными амплитудами колебаний в зависимости от их масс и жесткости упруговязких каналов раствора. При определенной условности этой схемы на её основе можно сделать следующие выводы:
1) выбранный динамический режим работы виброуплотняющей машины должен обеспечить сохранность упруговязких каналов цементного раствора, иначе возникнут турбулентные перемещения частиц заполнителя смеси, которые вызовут её расслоение, сопровождаемое выбросом частиц заполнителя А на поверхность изделия и значительным подсосом атмосферного воздуха; 2) вид и направление колебания рабочего органа машины должны 3) характер колебаний рабочего органа машины должен выбираться с учетом требований, предъявляемых к формуемому изделию (прочность, водонепроницаемость, морозостойкость, долговечность); 4) выбранный вибрационный режим уплотнения бетонной смеси должен обеспечить возбуждение наибольшего числа единиц А, входящих в состав смеси фракций крупного заполнителя, и эффективное использование порожденных сил инерции для разрушения начального структурного состояния частиц заполнителя системы с последующим сближением.
Эффективность вибрации при уплотнении бетонной смеси состоит в том, что приводятся в движение частицы относительно друг друга в объеме системы, и кроме того, возбужденные частицы развивают значительные скорости относительно своих центров масс. Рационально выбранный вибрационный режим процесса уплотнения бетонной смеси должен обеспечить смеси такое состояние, при котором наблюдается наименьший уровень реологических сопротивлений. Этим создается условие снижения энергоемкости процесса виброуплотнения бетонной смеси при формовании. Степень уплотнения бетонной смеси оценивается коэффициентом уплотнения Купл. - отношением фактической плотности бетона к теоретической массе плотности (Купл. > 0,98). Плотность бетона повышается с уменьшением водоцементного отношения смеси, что обеспечивает широкое применение жёстких бетонных смесей. В вибрационных машинах наибольшее применение получили два способа возбуждения механических колебаний: силовое и кинематиче ское. Силовое возбуждение осуществляется внешними переменными силами Ft, Н, или моментами Мt, Н·м, которые приложены к инерционным элементам системы, а сами силы (моменты) создаются различными типами центробежных виоровозоудителеи за счет вращения неуравновешенных элементов. Кинематическое возбуждение осуществляется сообщением извне рабочему органу вибрамашины различных по виду колебаний за счет применения кривошипно-шатунного, эксцентрикового и других механизмов. Механические колебания классифицируются по виду и характеру движения рабочего органа. По виду движения механические колебания различаются на колебательные, угловые, циркулярные и смешанные. Колебательными прямолинейно направленными называются колебания, когда рабочий орган совершает возвратно-поступательное движение вдоль прямой. Различают 3 направления движения (рисунок 49) рабочего органа: а) под углом к горизонту; б) в вертикальной плоскости; в) в горизонтальной плоскости.
Угловыми (поворотными) называются такие колебания рабочего органа, когда он совершает возвратно-поступательное движение относительно оси. Различают 2 вида угловых колебаний (рисунок 50): а) относительно горизонтальной оси; б) относительно вертикальной оси.
При циркулярных колебаниях (рисунок 51) рабочий орган вибромашин совершает перемещение в одном направлении по замкнутой кривой. Смешанные колебания (рисунок 52) характеризуются тем, что рабочий орган совершает одновременно колебательное и циркулрные движение: прямолинейное и круговое или угловое и круговое. Смешанные колебания позволяют повысить эффекгивность вибромашины.
По характеру движения рабочего органа механические колебания различаются на 2 группы; вибрационные и ударно-вибрационные. Вибрационные колебания подразделяются на синусоидальные (моногармонические) и двухчастотные (бигармонические), которые не получили применения в вибромашинах. При синусоидальных колебаниях проекция радиуса-вектора на горизонтальную ось описывается равенством
где Х - координата колеблющейся точки, м; а- амплитуда колебаний, м; Т- период колебаний, с; t - текущее значение времени, с; φ - начальная фаза. Амплитуда колебаний а - абсолютная величина наибольшего отклонения от среднего положения при синусоидальных колебаниях. Период колебаний Т - промежуток времени, после которого движение повторяется. Фаза колебаний - аргумент синусоидальной функции (2πt/ Т) +φ, а начальная фаза φ - значение этого аргумента при t = 0. Частотой колебаний f, Гц, называют величину, обратную периоду f = 1/T. Угловая частота колебаний равна ω,с -1, равна
С учетом зависимости (100) перепишем формулу (99) в виде
Продифференцируем выражение (101). Получим зависимость для виброскорости (102) где аω - ам Сравнивая выражения (99) и (102), делаем вывод, что виброскорость опережает по фазе перемещение на угол π / 2. Продифференцируем выражение (102). Получим зависимость для виброускореиия
где аω2- амплитуда виброускорения.
Согласно (102) и (103) виброускорение опережает по фазе виброскорость на угол π / 2 и находится в противофазе с перемещением (рисунок 53)
Наибольшее применение для уплотнения бетонных смесе
Наибольшее применение для уплотнения бетонных смесей находят переносные вибраторы, у которых для возбуждения механических колебаний применяются центробежные вибровозбудители. Они создают инерционные силы (моменты) за счет вращения неуравновешенных элементов. Центробежные возбудители подразделяются па дебалансные, поводковые и планетарные. Дебалансный вибровозбудитель (рисунок 54,а) состоит из неуравновешенного элемента - дебаланса 1, вал 2 которого вращается в подшипниках качения, смонтированных в корпусе 3. Крутящий момент дебалансному валу передается от двигателя, встроенного в корпус. Статический момент массы дебаланса Sd, Н·м, равен произведению массы дебаланса на её эксцентриситет относительно оси вращения, т.е. на расстояние r,м, от центра тяжести дебаланса С до оси вращения О Sd =md · r (104) Возникающая центробежная (инерционная) сила Fd , Н, определится как произведение массы дебаланса тd кг, на ускорение, развиваемое дебалансом и равное произведению rω2 Fd=mdrω2. (105) Поводковый вибровозбудитель (рисунок 54,6) состоит из бегунка 1, подшипник которого установлен в ползуне, скользящем в вилке поводка 3. При вращении вала поводка бегунок обкатывается по беговой дорожке корпуса 2 с угловой скоростью ω, с-1, поводка, одновременно вращаясь около своей оси с угловой скоростью ωс. Статический момент массы бегунка Sпл, Н·м, равен произведению массы бегунка тб, кг, на эксцентриситет этой массы относительно оси беговой дорожки Sпл = mб ·r, (106) где r = D1 /2 - D2 /2 - разность радиусов беговой дорожки и бегунка.
а) дебалансный, б) поводковый, в) планетарный с внешней обкаткой бегунка, г) планетарный с внутренней обкаткой бегунка Рисунок 54 - Принципиальные схемы центробежных вибровозбудителей
Планетарные вибровозбудители бывают двух схем: с внешней обкаткой (рисунок 54,в); когда бегунок 1 обкатывается по беговой дорожке корпуса 3 через вал 2, и с внутренней обкаткой (рисунок 54,г). Центробежная сила, развиваемая бегунком планетарного вибровозбудителя F. н, определяется как произведение массы бегунка на ускорение, развиваемое бегунком при его обкатке, r · ω2, F = mб · r · ω 2, (107) где ω = i · ωб , i- передаточное отношение угловой скорости обкатки к угловой скорости собственного вращения бегунка ωб. Угловая скорость: при внутренней обкатке ω= D2 /2· ωб:(D2 / 2 –D1 /2). (108) Следовательно, эти вибровозбудители позволяют получать высокие частоты колебаний без применения специальных преобразований частоты. Дебалансные вибровозбудители общего назначения в большинстве случаев выпускаются со встроенными трехфазными асинхронными электродвигателями с короткозамкнутым ротором. Промышленностью выпускаются одновальные вибровозбудители с круговой вынуждаюшей силой, двухвальные и маятниковые вибровозбудители с направленной вынуждающей силой (рисунок 55).
В корпусе 1 одновального вибровозбудителя (рисунок 55,а) запрессован статор асинхронного трехфазного электродвигателя с короткозамкнутым ротором 2. Вал 3 ротора опирается на подшипники качения 4, смонтированные в щитах 5 корпуса. На обоих концах вала установлены дебалансы 6, которые перекрываются крышками. Дебалансы выполнены со ступенчатой регулировкой статического момента и состоят из двух частей - неподвижной и поворотной.
Суммарный статический момент такого дебаланса Sd , Н·м. Sd = 2 S1 ·cos φ/2 (109)
На рисунке 55,в показан двухвальный вибровозбудитель направленного действия, представляющий собой два соединённых между собой одновальных вибровозбудителя с параллельными валами встроенных электродвигателей. Суммарный статистический момент будет равен сумме статистических моментов каждого дебаланса. Общий вид маятникового вибровозбудителя показан на рисунке 55,г. В корпусе 2 смонтирован одновальный дебалансный вибровозбудитель. Корпус-маятник шарнирно соединён с основанием 1, прикрепленным к рабочему органу вибрируемой конструкции. Вал 5 основания опирается на подшипники качения 3, а его концы соединены с резинометаллическими втулками 4. Такое крепление концов вала позволяет устанавливать маятниковую часть под различными углами к поверхности вибрируемой конструкции. Вынуждающая сила, создаваемая этим вибровозбудителем, состоит из двух составляющих: продольной, направленной вдоль оси симметрии маятника, и направленной ей перпендикулярно. Первая составляющая воспринимается основанием 1, а вторая гасится качанием маятника. Основным положением, определяющим получение направленных колебаний рабочего органа вибрируемой маятниковой системы, является правильное назначение расстояния l,м, между осью качания маятника и осью вращения дебаланса, равное
где Ι - момент инерции маятника относительно оси качаний, МПа; т - масса маятника, кг; l1 - расстояние ОС от оси шарнира маятника до его центра тяжести, м.
а) одновальный, б) со съемными дополнительными дебалансами, в) двухвальный, г) маятниковый Рисунок 55 - Конструкции дебалансных вибровозбудителей
Грузоподъёмные машины
Назначение, классификация Грузоподъёмные машины и механизмы предназначены для перемещения грузов в вертикальной и горизонтальной плоскостях на относительно небольшие расстояния. Они относятся к устройствам циклического действия, работающим в повторно-кратковременном режиме. Основными параметрами грузоподъёмных машин является грузоподъёмность, скорость движения отдельных механизмов, режимы работы, производительность, высота подъёма и др. Грузоподъёмные машины обычно состоят из привода, рабочих механизмов, металлической конструкции, грузозахватного устройства. Грузоподъёмные машины ориентировочно можно разделить на 3 группы: простейшие устройства для подъёма грузов, подъёмники и краны.
|
|||||||||||
|
|
Последнее изменение этой страницы: 2016-12-12; просмотров: 376; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.140.185.170 (0.047 с.) |




 (99)
(99) (100)
(100) (101)
(101)
 (103)
(103)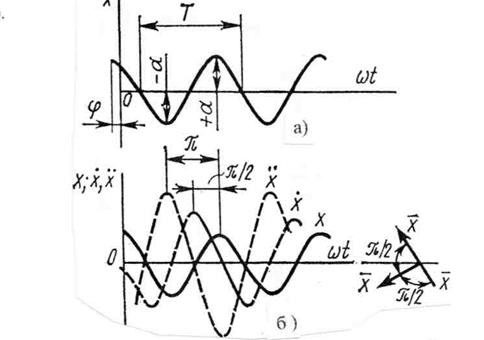 а) график перемещений; б) график перемещений, скоростей и ускорении Рисунок 53 - Графики гармонических колебаний
а) график перемещений; б) график перемещений, скоростей и ускорении Рисунок 53 - Графики гармонических колебаний

 (110)
(110)



