
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Вывести необходимые уравнения движения, определить численные значение постоянных времени и коэффициентов усиленияСтр 1 из 3Следующая ⇒
Построение структурной схемы с указанием передаточных функции звеньев. В соответствии с у уравнениями: (1), (2), (3), (4), (19), (21), (22) была построена и изображена на рис 2 структурная схема следящей системы с указанием передаточных функции звеньев.
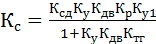
Рис 2. Структурная схема следящей системы с указанием передаточных функции звеньев. Определение передаточной функции замкнутой системы для регулируемой координаты по команде и по возмущению; для рассогласования-по команде и по возмущению Приведем схему, изображенную на рис 1 к одноконтурному виду. Для этого объединим передаточную функцию двигателя по управлению с передаточной функцией тахогенератора:
Также объединим передаточную функцию двигателя по возмущению с передаточной функцией тахогенератора:
обозначим:
Тогда при принятых обозначениях и уравнениях (23), (24) схема, после преобразования, будет выглядит следующим образом и представлена на рис 3.
Рис 3. Структурная схема САУ после преобразования
Определим передаточные функции замкнутой системы для регулируемой координаты по команде и по возмущению; для рассогласования - по команде и по возмущению. Для этого запишем передаточные функции в общем виде:
Так как в формулах (29)-(31) используется
Проведение Д-разбиения по коэффициенту усиления системы. Построение годографа Михайлова. Определение критического коэффициента усиления и сравнение с коэффициентом усиления, найденным в п.4 Проведение Д-разбиения по коэффициенту усиления системы. Запишем передаточную функцию разомкнутой системы:
Перед тем как начать Д- разбиение, произведем замену в передаточной функции разомкнутой системы. А именно:
После данных замен передаточная функция разомкнутой системы примет следующий вид:
Запишем характеристический полином для Д- разбиения относительно коэффициента
Выразив
Заменив в выражении (36) p на jω, получим следующие соотношение:
После раскрытия скобок в выражении (38) и выделения действительной и мнимой части, получим следующие соотношения для действительной и мнимой части соответственно.
U(ω)= V(ω)= Рассчитаем
Далее, при помощи программы Mathcad, при ω=0,10..1000, в соответствии с уравнениями (39) и (40), было построено в плоскости U(ω), V(ω) Д- разбиение, которое приведено на рис 5 и 5.1 Разметка системы координат. С учетом полученного диапазона частот сопряжения наносим сетку в системе координат (СК): по оси ординат (для ЛАХ L(ω)-дб, для ЛФХ φ(ω)-рад, град.) по оси абсцисс (ω, lgω) в диапазоне частот ω 3. Построение асимптотической ЛАХ. Постоим звено W(p)= Построение ЛФХ. Для построения ЛФХ воспользуемся шаблонами, которые были построены для функций:
Согласно критерию Найквиста-Михайлова для того, чтобы система, устойчивая в разомкнутом состоянии и имеющая амплитудно-фазовую характеристику первого рода, была устойчивая в замкнутом состоянии, необходимо и достаточно на тех частотах, при которых логарифмическая амплитудно-частотная характеристика не отрицательна, т.е.
Заключение Изначально смоделированная система следящей системы в программе Матлаб была не устойчивой. Это подтверждается рис.9. Поэтому в модель системы было включено последовательное корректирующее звено. После включения которого, система стала устойчивой. Это подтверждается рис. 11. Для снятия времени регулирования на вход системы был подан единичный сигнал и отключено возмущающее воздействие. В результате проведенной работы получены следующие характеристики САУ:
В данной работе не были учтены нагрев резисторов и нелинейности такие как: насыщение, люфт и зона нечувствительности. Однако приведенные запасы по фазе и амплитуде нивелируют неучтенные факторы и позволяют системе работать. Можно сказать, что данная следящая система может выполнять поставленную задачу в соответствии с требуемыми показателями точности.
Список использованной литературы: 1. Карпов. А. И. Лекции по предмету ТАУ, каф. ОЭС. 2. Солодовников. В. В. Техническая кибернетика / Москва 1967 г. 3. Под редакцией проф. Г. А. Дегтярова. Теория автоматического управления. Методические указания к курсовой работе / Казань 1998 г.
Вывести необходимые уравнения движения, определить численные значение постоянных времени и коэффициентов усиления
Рис 1. Схема следящей системы Условные обозначения, используемые на схеме. - Сумматор. ФД- фазовый детектор. Ф- фильтр. У- усилитель. Дв- двигатель. Р- редуктор. Т- объект управления. ТГ- тахогенератор. Uф –напряжение фильтра. αвх – входное значение угла. αвых – выходное значение угла. ε – рассогласование. Uтг - напряжение на тахогенераторе. ΔU - разности напряжений на фильтре и на тахогенераторе. U - напряжение после усилителя α–угол поворота выходного вала Исходные данные: Jн = 0.2 кг*м2 – момент инерции нагрузки P = 50 Вт – мощность двигателя Uном =110 В – номинальное напряжение i ном = 0.65 А – номинальный ток якоря R = 20.5 Ом – сопротивление якоря Lя = 0.115 Гн – индуктивность якоря Jя = 0.7*10-4 кг*м2 – момент индукции якоря n = 3000 об/мин – скорость вращения Mв = 6.4 H*м – возмущающий момент Ктг = 0.04 Кр = 0.02 – передаточный коэффициент редуктора Тф = 0.005 с – постоянная времени фильтра
i = 50 – коэффициент редукции Показатели качества системы:
Уравнения следящей системы:
1.Уравнение напряжения фильтра
Uф = где: Uф –напряжение фильтра,
Тф – постоянная времени фильтра.
2 Уравнение рассогласования ε = αвх- αвых , (2) где: αвх – входное значение угла, αвых – выходное значение угла, ε – рассогласование.
3 Уравнение разности напряжений на фильтре и на тахогенераторе
ΔU = Uф – Uтг, (3) где: Uф – напряжение на фильтре, Uтг - напряжение на тахогенераторе, ΔU - разности напряжений на фильтре и на тахогенераторе.
4 Уравнение напряжения после усилителя
U = КуΔU, (4) где: U - напряжение после усилителя, Ку – коэффициент усилителя.
5 Уравнение двигателя.
Составим два уравнения для двигателя. Первое уравнение получено из второго закона Кирхгофа для цепи якоря:
здесь Lя – индуктивность якоря, Rя–сопротивление якоря, iя – сила тока якоря, α– угол поворота выходного вала, Се − коэффициент противо ЭДС равный
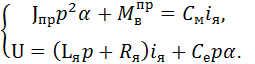
Второе уравнение представляет собой закон равновесия моментов на валу двигателя:
Jпр
где Jпр– приведенный момент инерции, Jпр= (Jдв + Jн/i2)=0,7* Jдв, Jн – моменты инерции двигателя и нагрузки соответственно, Мвпр– приведенный момент. Очевидно, что Условие 1:
Мвпр =MвКр =6.4*0.02= 0.128 H*м. (9) Из уравнений (8) и (9) видно, что условие 1 выполняется, а значит редуктор с таким передаточным коэффициентом подходит. Условие 2:
Из уравнения (10) видно, что условие 2 выполняется, а следовательно использование привода, с такими параметрами возможно. В уравнении (6) См − коэффициент момента равен:
Преобразуем систему уравнений (5) − (6), используя оператор
Перепишем второе уравнение системы (12):
В уравнении (13) где Из уравнения (13) имеем:
Подставляя (14) в первое уравнение системы (12) получаем:
(
Перепишем уравнение (16) обозначив:
И перепишем уранение (16):
Обозначим:
Тогда уравнение двигателя запишется следующим образом:
Уравнение напряжения тахогенератора: Uтг= Ктг Уравнение выходного значения угла: αвых= Крα. (22)
|
|||||||
|
|
Последнее изменение этой страницы: 2016-12-09; просмотров: 491; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.21.100.34 (0.085 с.) |


 . (23)
. (23)
 ,(24)
,(24) ; (25)
; (25) ; (26)
; (26) . (27)
. (27)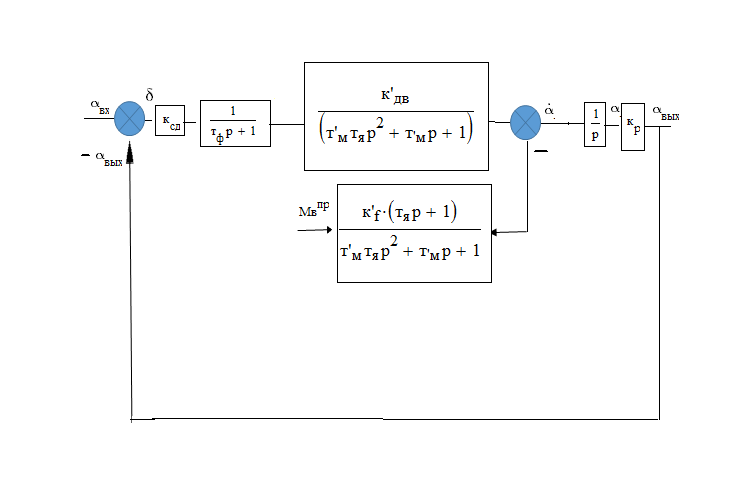

 ; (28)
; (28) 
 ; (29)
; (29)
 ; (30)
; (30)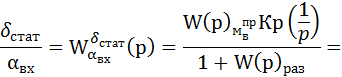
 . (31)
. (31) , запишем с помощью Рис 3 передаточную функцию разомкнутой системы:
, запишем с помощью Рис 3 передаточную функцию разомкнутой системы: . (32)
. (32)

 .
. .
. :
:
 (36)
(36) , раскрывая скобки, получим следующее соотношение:
, раскрывая скобки, получим следующее соотношение: (37)
(37) . (38)
. (38) (39)
(39) (40)
(40) по представленной формуле;
по представленной формуле; . (41)
. (41) (1,4500). Ось ординат проводим через ω=1. Нанесем частоты:
(1,4500). Ось ординат проводим через ω=1. Нанесем частоты:  ,
,  на оси абсцисс и проведем через них вертикальные вспомогательные пунктирные линии. Масштабы: по оси частот декада – 100мм, по оси ординат 1дб, 1град. – 1мм. Проведем через точку (L(ω)= 20.40.60.80, ω=10) вспомогательные асимптоты под наклоном
на оси абсцисс и проведем через них вертикальные вспомогательные пунктирные линии. Масштабы: по оси частот декада – 100мм, по оси ординат 1дб, 1град. – 1мм. Проведем через точку (L(ω)= 20.40.60.80, ω=10) вспомогательные асимптоты под наклоном  (20,40,60,80) дб/дек.
(20,40,60,80) дб/дек. /p. Отложим L(ω)=
/p. Отложим L(ω)=  при ω=1 и проведем через эту точку прямую под наклоном -20 дб/дек пунктирно (ЛАХ интегрирующего звена построена). Далее, двигаясь по этой прямой из точки при ω=1 вправо до пересечения с вертикальной прямой, проведенной через
при ω=1 и проведем через эту точку прямую под наклоном -20 дб/дек пунктирно (ЛАХ интегрирующего звена построена). Далее, двигаясь по этой прямой из точки при ω=1 вправо до пересечения с вертикальной прямой, проведенной через  ,
,  . Достроим ЛАХ с учетом этих поправок.
. Достроим ЛАХ с учетом этих поправок. ;
;  ,
, :
: . При построении исходя из передаточной функции
. При построении исходя из передаточной функции  на частотах
на частотах  иметь значение фазы φ(ω), не превосходящее -π. В соответствии с критерием Найквиста-Михайлова, исходная передаточная функция моделируемой системы не устойчива.
иметь значение фазы φ(ω), не превосходящее -π. В соответствии с критерием Найквиста-Михайлова, исходная передаточная функция моделируемой системы не устойчива. ;
; 

 . Сопротивления последовательного корректирующего устройства: сопротивления первого звена R1=174 кОм, R2=124 кОм, сопротивления второго звена R1=12 кОм, R0=15 кОм, сопротивления третьего звена R1=5 кОм, R0=5 кОм.
. Сопротивления последовательного корректирующего устройства: сопротивления первого звена R1=174 кОм, R2=124 кОм, сопротивления второго звена R1=12 кОм, R0=15 кОм, сопротивления третьего звена R1=5 кОм, R0=5 кОм. – крутизна статической характеристики
– крутизна статической характеристики = 10 В/рад - коэффициент сельсин датчика
= 10 В/рад - коэффициент сельсин датчика - статическая ошибка
- статическая ошибка – скоростная ошибка
– скоростная ошибка – время регулирования
– время регулирования - динамическая ошибка
- динамическая ошибка ε, (1)
ε, (1) - коэффициент сельсин датчика,
- коэффициент сельсин датчика, , (5)
, (5) .
. Mвпр =Cмiя , (6)
Mвпр =Cмiя , (6) , кг* м2+(0,2, кг* м2 /502)=0,00078 кг* м2, (7)
, кг* м2+(0,2, кг* м2 /502)=0,00078 кг* м2, (7) должен быть больше Мвпр.
должен быть больше Мвпр.
 , (8)
, (8) ,
, . (10)
. (10) . (11)
. (11) :
: (12)
(12) . (13)
. (13) = 0,0056 с,
= 0,0056 с, - постоянная времени якоря.
- постоянная времени якоря. . (14)
. (14) , (15)
, (15)
 ;
;
 ;
;
 (16)
(16) ;
;


 − электромеханическая постоянная двигателя;
− электромеханическая постоянная двигателя; − коэффициент усиления двигателя равен:
− коэффициент усиления двигателя равен: ; (17)
; (17) − коэффициент усиления по возмущению;
− коэффициент усиления по возмущению; (18)
(18) =
=  . (19)
. (19)
 . (20)
. (20) = Ктг
= Ктг  . (21)
. (21)


