Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Двойной антиферромагнитный слой
Последним достижением в технологии изготовления носителей жестких дисков является использование антиферромагнитных двойных слоев (antiferromagnetically coupled - AFC), позволяющих существенно увеличить плотность рабочего слоя, превысив наложенные ранее ограничения. Увеличение плотности материала дает возможность уменьшить толщину магнитного слоя диска. Плотность записи жестких дисков (которая выражается в количестве дорожек на дюйм или в числе бит на дюйм) достигла той точки, в которой кристаллы магнитного слоя, используемые для хранения данных, становятся настолько малы, что это приводит к их нестабильности и, как следствие, к низкой надежности запоминающего устройства. Границы плотности, получившие название суперпарамагнитного ограничения, должны находиться в пределах от 30 до 50 Гбит/дюйм2. В настоящее время плотность записи данных уже достигла 35 Гбит/дюйм2, т.е. суперпарамагнитное ограничение становится довольно существенным фактором, определяющим свойства создаваемых накопителей. Носители AFC состоят из двух магнитных слоев, разделенных довольно тонкой пленкой металлического рутения, толщина которой 3 атома (6 ангстрем). Для описания этого сверхтонкого слоя рутения использовался термин "пыльца эльфов" (pixie dust), придуманный в IBM. Подобная многослойная конструкция образует антиферромагнитное соединение, состоящее из верхнего и нижнего магнитных слоев, что позволяет различать эти слои по всей видимой высоте жесткого диска. Такая конструкция дает возможность использовать физически более толстые магнитные слои, имеющие более устойчивые кристаллы большого размера, благодаря чему носители могут функционировать как одинарный слой, отличающийся гораздо меньшей общей толщиной. Использование рабочего слоя AFC позволит, как ожидается, повысить плотность записи данных до 1000 Гбит/дюйм2 и более. Головки чтения/записи
В накопителях на жестких дисках для каждой из сторон каждого диска предусмотрена собственная головка чтения/записи. Все головки смонтированы на общем подвижном каркасе и перемещаются одновременно. Конструкция каркаса с головками довольно проста. Каждая головка установлена на конце рычага, закрепленного на пружине и слегка прижимающего ее к диску.
Когда накопитель выключен, головки касаются дисков под действием пружин. При раскручивании дисков аэродинамическое давление под головками повышается и они отрываются от рабочих поверхностей ("взлетают"). Когда диск вращается на полной скорости, зазор между ним и головками может составлять 0,5-5 микродюймов и даже больше. Конструкции головок чтения/записи По мере развития технологии производства дисковых накопителей совершенствовались и конструкции головок чтения/записи. Первые головки представляли собой сердечники с обмоткой (электромагниты). Механизмы привода головок Механизм, который устанавливает их в нужное положение и называется приводом головок. Именно с его помощью головки перемещаются от центра к краям диска и устанавливаются на заданный цилиндр. Существует много конструкций механизмов привода головок, но их можно разделить на два основных типа:
Тип привода во многом определяет быстродействие и надежность накопителя, достоверность считывания данных, его температурную стабильность, чувствительность к выбору рабочего положения и вибрациям. Приводы с шаговым двигателем обычно использовались на жестких дисках емкостью до 100 Мбайт и менее, которые создавались в 1980-х и в начале 1990-х годов. Во всех накопителях, имеющих более высокую емкость, обычно используются приводы с подвижной катушкой. В накопителях на гибких дисках для перемещения головок используется привод с шаговым двигателем. Его параметров (в том числе и точности) оказывается вполне достаточно для дисководов этого типа, поскольку плотность дорожек записи на гибких дисках значительно ниже (135 дорожек на дюйм), чем в накопителях на жестких дисках (более 5 000 дорожек на дюйм). В большинстве выпускаемых сегодня накопителей устанавливаются приводы с подвижными катушками.
Привод с шаговым двигателем
Шаговый двигатель - это электродвигатель, ротор которого может поворачиваться только ступенчато, т.е. на строго определенный угол. Если покрутить его вал вручную, то можно услышать негромкие щелчки (или треск при быстром вращении), которые возникают всякий раз, когдаротор проходит очередное фиксированное положение. Шаговые двигатели могут устанавливаться только в фиксированных положениях. Размеры этих двигателей невелики (порядка нескольких сантиметров), а форма может быть разной - прямоугольной, цилиндрической и т.д. Шаговый двигатель устанавливается вне блока HDA, но его вал проходит внутрь через отверстие с герметизирующей прокладкой. Обычно двигатель располагается у одного из углов корпуса накопителя и его можно легко узнать. Одна из самых серьезных проблем механизма с шаговым двигателем - нестабильность температуры. При нагреве и охлаждении диски расширяются и сжимаются, в результате чего дорожки смещаются относительно своих прежних положений. Поскольку механизм привода головок не позволяет сдвинуть их на расстояние, меньшее одного шага (переход на одну дорожку), компенсировать погрешности температур невозможно. Головки перемещаются в соответствии с поданным на шаговый двигатель количеством импульсов. Привод с подвижной катушкой Такой привод используется практически во всех современных накопителях. В отличие от систем с шаговыми двигателями, в которых перемещение головок осуществляется вслепую, привод с подвижной катушкой использует сигнал обратной связи, чтобы можно было точно определить положения головок относительно дорожек и скорректировать их в случае необходимости. Такая система обеспечивает более высокие быстродействие, точность и надежность, чем традиционный привод с шаговым двигателем. Привод с подвижной катушкой работает по принципу электромагнетизма. По конструкции он напоминает обычный громкоговоритель. В типичной конструкции привода подвижная катушка жестко соединяется с блоком головок и размещается в поле постоянного магнита. Катушка и магнит никак не связаны между собой; перемещение катушки осуществляется только под воздействием электромагнитных сил. При появлении в катушке электрического тока она так же, как и в громкоговорителе, смещается относительно жестко закрепленного постоянного магнита, передвигая при этом блок головки. Подобный механизм обладает высоким быстродействием и оказывается менее шумным, чем привод с шаговым двигателем. В отличие от привода с шаговым двигателем, в устройствах с подвижной катушкой нет заранее зафиксированных положений. Вместо этого в них используется специальная система наведения (позиционирования), которая точно подводит головки к нужному цилиндру (поэтому привод с подвижной катушкой может плавно перемещать головки в любые положения). Эта система называется сервоприводом, для точного наведения (позиционирования) головок используется сигнал обратной связи, несущий информацию о реальном взаимном расположении дорожек и головок. Эту систему часто называют системой с обратной связью (или с автоматической регулировкой).
Колебания температур не сказываются на точности работы привода с подвижной катушкой и обратной связью. При сжатии и расширении дисков все изменения их размеров отслеживаются сервоприводом, и положения головок корректируются. Для поиска конкретной дорожки используется заранее записанная на диске вспомогательная информация (сервокод), и в процессе работы всегда определяется реальное положение цилиндра на диске с учетом всех отклонений температур. Поскольку сервокод считывается непрерывно, в процессе нагрева накопителя и расширения дисков, например, головки отслеживают дорожку и проблем со считыванием данных не возникает. Поэтому привод с подвижной катушкой и обратной связью часто называют системой слежения за дорожками. Механизмы привода головок с подвижной катушкой бывают двух типов: · линейный; · поворотный. Эти типы отличаются только физическим расположением магнитов и катушек Линейный привод
Линейный привод перемещает головки по прямой, строго вдоль линии радиуса диска. Катушки располагаются в зазорах постоянных магнитов. Главное достоинство линейного привода состоит в том, что при его использовании не возникают азимутальные погрешности, характерные для поворотного привода. (Под азимутом понимается угол между плоскостью рабочего зазора головки и направлением дорожки записи.) При перемещении с одного цилиндра на другой головки не поворачиваются и их азимут не изменяется. Линейный привод имеет существенный недостаток: его конструкция слишком массивна. Чтобы повысить производительность накопителя, нужно снизить массу привода и самих головок. Чем легче механизм, тем с большими ускорениями он может перемещаться с одного цилиндра на другой. Линейные приводы намного тяжелее поворотных, поэтому в современных накопителях они не используются. Поворотный привод работает по тому же принципу, что и линейный, но в нем к подвижной катушке крепятся концы рычагов головок. При движении катушки относительно постоянного магнита рычаги перемещения головок поворачиваются, передвигая головки к оси или к краям дисков. Благодаря небольшой массе такая конструкция может двигаться с большими ускорениями, что позволяет существенно сократить время доступа к данным. Быстрому перемещению головок способствует и тот факт, что плечи рычагов делаются разными: то, на котором смонтированы головки, имеет большую длину.
К недостаткам этого привода следует отнести то, что головки при перемещении от внешних цилиндров к внутренним поворачиваются и угол между плоскостью магнитного зазора головки и направлением дорожки изменяется. Именно поэтому ширина рабочей зоны диска (зоны, в которой располагаются дорожки) оказывается зачастую ограниченной (для того чтобы неизбежно возникающие азимутальные погрешности оставались в допустимых пределах). В настоящее время поворотный привод используется почти во всех накопителях с подвижной катушкой. Сервопривод Для управления приводами с подвижной катушкой в разное время использовались три способа построения петли обратной связи: · со вспомогательным "клином"; · со встроенными кодами; · со специализированным диском. Они различаются технической реализацией, но, по сути, предназначены для достижения одной и той же цели: обеспечивать постоянную корректировку положения головок и их наведение (позиционирование) на соответствующий цилиндр. Основные различия между ними сводятся к тому, на каких участках поверхностей дисков записываются сервокоды. При всех способах построения петли обратной связи для ее работы необходима специальная информация (сервокоды), которая записывается на диск при его изготовлении. Обычно она записывается в так называемом коде Грея. В этой системе кодирования при переходе от одного числа к следующему или предыдущему изменяется всего один двоичный разряд. Сервокоды записываются на диск при сборке накопителя и не изменяются в течение всего срока его эксплуатации. Запись сервокодов выполняется на специальном устройстве, в котором головки последовательно перемещаются на строго определенные позиции, и в этих положениях на диски записываются упомянутые выше коды. Для точной установки головок в таких устройствах используется лазерный прицел, а расстояния определяются методом интерференции, т.е. с точностью до долей волны лазерного излучения. Поскольку перемещение головок в таком устройстве осуществляется механически (без участия собственного привода накопителя), все работы проводятся в чистом помещении либо с открытой крышкой блока HDA, либо через специальные отверстия, которые по окончании записи сервокодов заклеиваются герметизирующей лентой. При обычных операциях считывания и записи удалить сервокоды невозможно. Этого нельзя сделать даже при форматировании низкого уровня. Во многих современных накопителях с приводом от подвижной катушки в процессе работы через определенные промежутки времени выполняется температурная калибровка. Эта процедура заключается в том, что все головки поочередно переводятся с нулевого на какой-либо другой цилиндр. При этом с помощью встроенной схемы проверяется, насколько сместилась заданная дорожка относительно своего положения в предыдущем сеансе калибровки, и вычисляются необходимые поправки, которые заносятся в оперативное запоминающее устройство в самом накопителе. Впоследствии эта информация используется при каждом перемещении головок, позволяя устанавливать их с максимальной точностью.
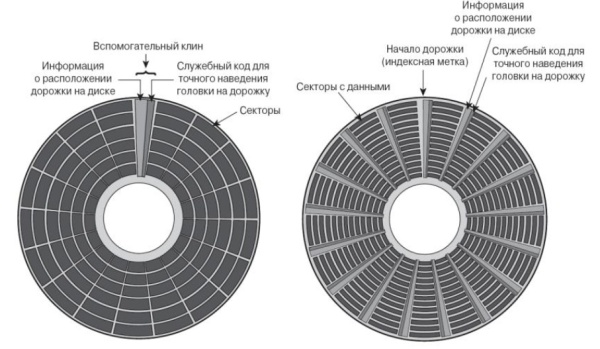
В большинстве накопителей температурная калибровка выполняется через каждые 5 мин в течение первого получаса после включения питания, а затем через каждые 25 мин. Некоторые пользователи полагают, что произошла ошибка при считывании данных, но на самом деле просто подошло время очередной калибровки. Вспомогательный клин Такая система записи сервокодов использовалась в первых накопителях с подвижной катушкой. Вся информация, необходимая для наведения (позиционирования) головок, записывалась в кодах Грея в узком секторе ("клине") каждого цилиндра непосредственно перед индексной меткой. Индексная метка обозначает начало каждой дорожки, т.е. вспомогательная информация записывается в предындексном интервале, расположенном в конце каждой дорожки. Этот участок необходим для компенсации неравномерности вращения диска и тактовой частоты записи, и контроллер диска обычно к нему не обращается. Некоторым контроллерам необходимо сообщать о том, что к ним подключен накопитель со вспомогательным клином. В результате они корректируют (сокращают) длину секторов, чтобы поместить область вспомогательного клина.
Самый существенный недостаток подобной системы записи состоит в том, что считывание происходит только один раз при каждом обороте диска. Это означает, что во многих случаях для точного определения и коррекции положения головок диск должен совершить несколько оборотов. Недостаток этот был очевиден с самого начала, поэтому подобные системы никогда не были широко распространены, а сейчас и вовсе не используются. Встроенные коды Такой метод реализации обратной связи представляет собой улучшенный вариант системы со вспомогательным клином. В данном случае сервокоды записываются не только в начале каждого цилиндра, но и перед началом каждого сектора. Это означает, что сигналы обратной связи поступают на схему привода головок несколько раз в течение каждого оборота диска и головки устанавливаются в нужное положение намного быстрее. Еще одно преимущество (по сравнению с системой со специализированным диском) заключается в том, что сервокоды записываются на всех дорожках, поэтому может быть скорректировано положение каждой головки. Описанный способ используется в большинстве современных накопителей. Как и в системах со вспомогательным клином, встроенные сервокоды защищены от стирания и любые операции записи блокируются, если головки оказываются над участками со служебной информацией. Поэтому даже при форматировании низкого уровня удалить сервокоды невозможно. Система со встроенными сервокодами работает лучше, чем со вспомогательным клином, потому что служебная информация (сервокоды) считывается несколько раз за каждый оборот диска. Но вполне очевидно, что еще более эффективной должна быть система, при которой цепь обратной связи работает непрерывно, т.е. сервокоды считываются постоянно.
|
|||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-12-11; просмотров: 300; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.223.196.59 (0.028 с.) |