
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
электромагнитов постоянного и переменного тока.Содержание книги
Поиск на нашем сайте
Для электромагнитов постоянного и переменного тока с двумя рабочими зазорами сила тяговая характеристика может быть рассчитана по (19):
Если площади полюсов электромагнитов одинаковы и одинаковы значения индукции в зазорах Вm, то максимальное значение силы тяги электромагнита переменного тока равна силе тяги электромагнита постоянного тока. Поскольку на переменном токе Рср= Рm / 2, то средняя сила, развиваемая электромагнитом переменного тока в два раза меньше силы, развиваемой электромагнитом постоянного тока. Недостатком электромагнита переменного тока является и вибрация якоря. Применение короткозамкнутого витка с целью уменьшения вибрации приводит к снижению среднего значения силы тяги. Сравним теперь тяговые характеристики электромагнитов. Как следует из (13), сила тяги электромагнита постоянного тока обратно пропорциональна квадрату зазора. В связи с этим для обеспечения большей силы тяги электромагнит должен иметь либо малый ход якоря, либо большую МДС втягивающей катушки, создающей магнитный поток. В электромагните переменного тока с ростом зазора с одной стороны, растет магнитное сопротивление зазора, с другой - растет ток в обмотке, так что магнитный поток остается практически неизменным. При большом зазоре создается большая МДС обмотки, которая обеспечивает необходимый Фm. В связи с этим электромагниты переменного тока могут работать при относительно больших ходах якоря.
В электромагнитном приводе используется сила притяжения якоря к сердечнику электромагнита или сила, которая перемещает якорь в середине сердечника растягиваемой пружины. В тяговых аппаратах электромагнитные приводы применяют только как индивидуальные. Попытки применить их как групповые не увенчались успехом, т.к. эти приводы при значительных перемещениях подвижных частей оказываются громоздкими, требуют значительного количества энергии, имеют низкий КПД. Кроме аппаратов защиты, электромагнитные приводы обычно имеют индивидуальные контакты вспомогательных цепей и реле различного назначения.
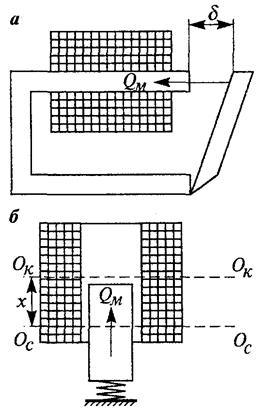
Рис.5 Магнитопроводы электрманитов
В тяговых аппаратах различают электромагниты с замкнутым (рис. 5,а) и разомкнутым (рис. 5б) магнитопроводом. Большое применение имеют аппараты с замкнутым магнитопроводом и поворотным якорем, т.к. при разомкнутой магнитной системе необходима большая МДС (магнитодвижущая сила) для формирования потока в системе с большим сопротивлением воздушного промежутка. Зависимость силы Qм от воздушного промежутка δ (хода якоря х) называют тяговой характеристикой электромагнитного привода Qм = f(δ). Рассмотрим метод построения тяговых характеристик электромагнита постоянного тока по кривым намагничивания. Допустим, что катушка электромагнита получает питание от постоянного источника с напряжением U0. При включении тока
где W - количество витков катушки; Ф - магнитный поток. Умножим обе части равенства (26) на idt. В результате интегрирования получим
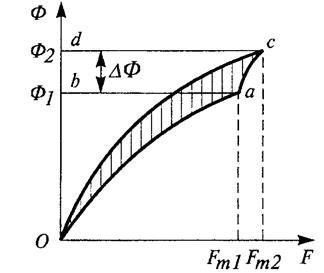
где F - МДС катушки электромагнита. Первая часть равенства (27) - энергия, полученная магнитным полем до достижения постоянного магнитного потока за время t, т.е. полученная от источника питания за исключением потерь в сопротивлении цепи. Действие электромагнитного привода можно разделить на 2 этапа; увеличения тока до начала перемещения якоря и перемещение якоря электромагнита. Зависимость Ф(F) при неподвижном якоре до его притягивания изображена зависимостью Оа (рис.6.)
Рис.6. Зависимость Ф(F)
Рис.7. Тяговая характеристика электромагнита
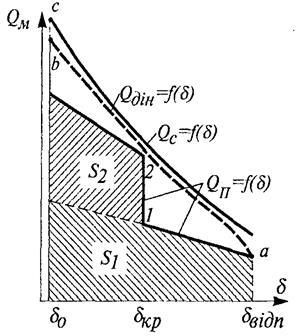
Площадь, ограниченная ординатами δ1 и δ2 и кривой QМ (δ), отвечает механической работе по перемещению якоря на участке δ1 - δ2. Пригодность электромагнита для данного аппарата можно определить сопоставляя диаграмму сил Qп (δ) сопротивления подвижной, которые привод должен преодолеть, с тяговой характеристикой электромагнита. Диаграмма сил может иметь разный вид в зависимости от характеристик пружин, их предварительного натяжения. Типовые характеристики QМ (δ) и Qп (δ) для электромагнитных индивидуальных контакторов приведены на рис.8.
Рис.8. Тяговая и противодействующая характеристики электромагнитного контактора. Противодействующая (механическая) характеристика Qп (δ) определяется совокупностью силы отключающей пружины и веса подвижных частей (площадь S1) и силами контактных пружин (площадь S2). Характеристики приведены к рабочему зазору электромагнита. Зазор δотп отвечает отпущенному, а зазор δ0 - притянутому состоянию якоря. В точке δотп сила Qп образовывается в основном весом подвижной системы и силой отключающей (поворотной) пружины (силами трения пренебрегаем). Во время движения якоря зазор δ уменьшается, а сила Qп увеличивается вследствие дополнительного сжатия отключающей пружины. В точке δпр происходит столкновение контактов, при этом Qп увеличивается скачкообразно до значения начальной силы надавливания контактов, которая определяется предварительным надавливанием контактной пружины, а дальше Qп возрастает плавно за счет дополнительного сжатия этой пружины. Противодействующие силы пружин и веса подвижной системы всегда направлены в одну сторону независимо от направления перемещения якоря. Для обеспечения четкого и надежного включения контактора тяговая характеристика должна лежать выше механической. Электромагнитные приводы в большинстве случаев питаются постоянным током от аккумуляторных батарей, кроме электромагнитов некоторых реле, которые контролируют силовые цепи переменного тока. Структура электромагнитных приводов позволяет повышать или снижать быстродействие аппаратов, уменьшая или увеличивая вихревые токи в магнитопроводах. Так для повышения быстродействия аппарата вихревые токи уменьшают, применяя магнитопроводы из электротехнической стали с узкой петлей гистерезиза. Если быстродействие не нужно, применяют пассивную магнитную систему, при которой время срабатывания составляет 0,08 - 0,15 с. Для образования больших замедлений - выдержек времени - на сердечник электромагнита устанавливают охватывающее его массивное кольцо из меди, латуни - демпферное кольцо - якобы усиливающее действие вихревых токов. При изменении магнитного потока в кольце наводится ЭДС
Под действием этой ЭДС в кольце, которое имеет очень малое электрическое сопротивление, rД возникает относительно большой ток iД и МДС FД
Результирующая МДС электромагнита
Для оценки эффективности электромагнитов важно знать величину силы, действующей на подвижный якорь, и зависимость этой силы от величины приложенного напряжения к катушке электромагнита при неизменном воздушном зазоре и от величины воздушного зазора между якорем и магнитопроводом при неизменном приложенном напряжении. Зависимость тяговой силы электромагнита от величины МДС катушки при неизменном воздушном зазоре называется нагрузочной характеристикой. МДС катушки F= i×w, где w - число витков катушки. При неизменном числе витков ток в катушке i º w. Из этого следует, что F º U и нагрузочную характеристику можно представить зависимостью P=f(U). Зависимость тяговой силы электромагнита от величины воздушного зазора при неизменной МДС (приложенном напряжении) катушки называется статической тяговой характеристикой электромагнита P = f(d). Тяговую силу электромагнита можно вычислить по энергетической зависимости:
где: F - МДС катушки; ld - магнитная проводимость воздушного зазора; d - величина воздушного зазора между якорем и магнитопрово дом. При использовании электромагнита с одним воздушным зазором и при достаточно малой его величине можно считать допустимым следующее:
где: m0 - магнитная проницаемость воздушного зазора; S - сечение воздушного зазора. При этом сила тяги электромагнита определяется по формуле:
Силу тяги электромагнита можно определить по формуле Максвелла, если магнитное поле в рабочем зазоре равномерное и магнитопровод не насыщен:
где: В - индукция в рабочем воздушном зазоре; S - сечение воздушного зазора. Аналитическое определение статической тяговой характеристики представляет определённую трудность. По этой причине, как правило, статическую тяговую характеристику определяют экспериментальным путём.
Порядок выполнения работы.
Предварительно изучив теоретический материал, экспериментальным путём определить нагрузочные характеристики Р = f(U) электромагнита постоянного тока в следующем порядке: 1. Собрать лабораторную установку рис.9 и предъявить ее преподавателю. 2..Ввиду того, что измерение величины воздушного зазора d при проведении лабораторной работы затруднительно, то с достаточной степенью точности при малых углах поворота якоря электромагнита величину воздушного зазора можно считать пропорциональной величине данного угла и измерять по шкале транспортира 2 в градусах. В обесточенном состоянии электромагнита с помощью винта 1 установить по шкале 2 величину зазора dн (начальное значение величины зазора), равное 20. Груз m на якоре электромагнита 3 установить в первое положение и с помощью регулятора напряжения медленно повышать напряжение на катушке электромагнита ЭМ и, как только якорь электромагнита притянется к сердечнику, снять показания вольтметра V и длину плеча 3. Снять питание с катушки электромагнита и переместить груз m в следующее положение, увеличив плечо 4. Опыт повторить с тем же самым грузом m, увеличивая плечо 5. В обесточенном состоянии электромагнита с помощью винта 1 по шкале 2 установить величину воздушного зазора, соответствующую d = 50. Перемещая груз m по всей длине плеча 6. Аналогично снять показания для величин воздушного зазора, соответствующих d = 100 и d = 150. 7. Произвести расчёт тяговых усилий при различных d и U для заданного m, исходя из выражения:
где: 8. m - масса груза, выраженная в килограммах. 9. Результаты измерений и расчётов свести в таблицу №1: Табл №1.
10. По результатам измерений и расчётов построить зависимости Р = f(U) при d =const и через зависимости Р = f(U) построить статические тяговые характеристики Р = f(d) при U=const и равном, соответственно, 40В, 60В, и 100В для заданного значения массы груза m. Вид вышеуказанных зависимостей представлен на рис. 10. 11. Для построения статических тяговых характеристик Р = f(d) необходимо: а) по результатам измерений и расчётов построить нагрузочные характеристики Р = f(U) для различных углов d (левый квадрант рис. 10.); б) для напряжений U= 40, 60 и 100 В (по указанию преподавателя могут быть заданы другие величины напряжений) провести прямые, параллельные оси ординат до пересечения с характеристиками Р=f(U) при d=const; в) из точек пересечения провести прямые, параллельные оси абсцисс, до пересечения с линиями, соответствующими заданным значениям d в правом квадранте рис. 10; г) по полученным точкам пересечения построить статические тяговые характеристики Р=f(d) для напряжений U= 40, 60 и 100 В (или указанных преподавателем).
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-12-10; просмотров: 819; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.15 (0.012 с.) |

 Электромагнитный привод.
Электромагнитный привод. (26)
(26) (27)
(27)

 , где WД=1 - количество витков кольца.
, где WД=1 - количество витков кольца.





 .
. . Медленно повышая напряжение на катушке электромагнита ЭМ, добиться срабатывания электромагнита и снять те же показания, что и в п. 2.1.
. Медленно повышая напряжение на катушке электромагнита ЭМ, добиться срабатывания электромагнита и снять те же показания, что и в п. 2.1. на всю длину плеча 3.
на всю длину плеча 3.





