Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Автоматы с памятью. Последовательностные схемы.
Узлы и устройства, которые содержат элементы памяти, относятся к классу автоматов с памятью (АП). Наличие элементов памяти (ЭП) придает АП свойство иметь некоторое внутреннее состояние Q, определяемое совокупностью состояний всех элементов памяти. В зависимости от внутреннего состояния, АП различно реагирует на один и тот же вектор входных сигналов X. Воспринимая входные сигналы при определенном состоянии, АП переходит в новое состояние и вырабатывает вектор выходных переменных Y. Таким образом, для АП QH = φ(Q, X) и Y = φ(Q, X), где QH и Q — состояния АП после и до подачи входных сигналов (индекс "н" от слова "новое"). Переходы АП из одного состояния в другое начинаются с некоторого исходного состояния Q0, задание которого также является частью задания автомата. Следующее состояние зависит от Q0 и поступивших входных сигналов X. В конечном счете, текущее состояние и выходы автомата зависят от начального состояния и всех векторов X, поступавших на автомат в предшествующих сменах входных сигналов. Таким образом, вся последовательность входных сигналов определяет последовательность состояний и выходных сигналов. Это объясняет название "последовательностные схемы", также применяемое для обозначения АП.
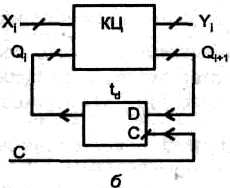
Автоматы с памятью в каноническом представлении разделяют на две части: память и комбинационную цепь. На входы КЦ подаются входные сигналы и сигналы состояния АП. На ее выходе вырабатываются выходные сигналы и сигналы перевода АП в новое состояние. Структурно АП отличаются от КЦ наличием в их схемах обратных связей, вследствие чего в них проявляются свойства запоминания состояний. Принципиальным является деление АП на асинхронные и синхронные. В асинхронных (рис. 37.1, а) роль элементов памяти играют элементы задержки, через которые сигналы состояния передаются на входы КЦ, чтобы совместно с новым набором входных переменных определить следующую пару значений Y и Q на выходе. Элементы АП переключаются здесь под непосредственным воздействием изменений информационных сигналов. Скорость распространения процесса переключений в цепях асинхронного автомата определяется собственными задержками элементов. В синхронном АП (рис. 37.1, б) имеются специальные синхросигналы (тактирующие импульсы) С, которые разрешают элементам памяти прием данных только в определенные моменты времени. Элементами памяти служат синхронные триггеры. Процесс обработки информации упорядочивается во времени, и в течение одного такта возможно распространение процесса переключения только в строго определенных пределах тракта обработки информации.
Рис. 37.1. Асинхронный (а) и синхронный (б) автоматы с памятью Применение асинхронных автоматов существенно затруднено сильным влиянием на их работу задержек сигналов в цепях АП, создающих статические и динамические риски, гонки элементов памяти (неодновременность срабатывания ЭП даже при одновременной подаче на них входных сигналов) и др. Характерным свойством асинхронного автомата является то, что при переходе из одного устойчивого состояния в другое он обычно проходит через промежуточные нестабильные состояния. В работах отечественных и зарубежных ученых разрабатывается направление, называемое проектированием самосинхронизирующихся устройств, в которых тактовые импульсы следуют с переменной частотой, зависящей от длительности реального переходного процесса в схеме. Однако перспективность этого направления еще не вполне ясна. В синхронных автоматах каждое состояние устойчиво и переходные временные состояния не возникают. Концепция борьбы с последствиями рисков и гонок в синхронных автоматах проста — прием информации в элементы памяти разрешается только после завершения в схеме переходных процессов. Это обеспечивается параметрами синхроимпульсов, задающих интервалы времени для завершения тех или иных процессов. В сравнении с асинхронными, синхронные АП значительно проще в проектировании. В теории автоматов проводится их классификация по ряду признаков. Не вдаваясь в подробности, отметим, что в схемотехнике преобладают автоматы Мура, выходы которых являются функциями только состояния автомата. Для этого автомата QH = f(Q, X) и Y = φ(Q). Зависимость выходов и от состояния автомата и от вектора входных переменных свойственна автоматам Мили. Некоторые функциональные узлы принадлежат к числу автономных автоматов, которые не имеют информационных входов, и под действием тактовых сигналов переходят из состояния в состояние по алгоритму, определяемому структурой автомата.
|
|||||
|
|
Последнее изменение этой страницы: 2016-09-20; просмотров: 393; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.145.59.187 (0.003 с.) |