
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Термоелектричні перетворювачі
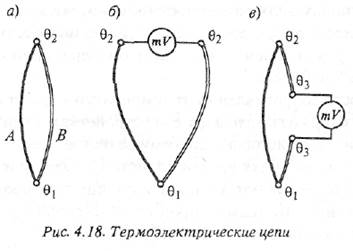
Принцип дії термоелектричних перетворювачів заснований на використовуванні наступного термоелектричного явища. Якщо з'єднати між собою два різнорідні провідники А і В (мал. 4.18, а) і температуру місць їх з'єднання підтримувати різною, то між провідниками виникає термоелектрична ЕРС (термо-ЕРС), значення якої залежить від матеріалу провідників і різниці температур місць їх з'єднання. Виникнення термо-ЕРС пояснюється неоднаковою густиною вільних електронів в різнорідних провідниках. Внаслідок цього в місці з'єднання провідників відбувається дифузія електронів з одного провідника в іншій. Провідник з більшою густиною вільних електронів набуває позитивний потенціал (завдяки дифузії деякої частини електронів в інший провідник), а провідник з меншою густиною — негативний потенціал. Таким чином, в місці з'єднання провідників виникає різниця потенціалів, значення якої залежить від температури Θ1 місця з'єднання:
У іншому місці з'єднання також виникає різниця потенціалів, залежна від температури Θ2 місця з'єднання:
Ланцюг, складений з двох різнорідних провідників, називається термоелектричним перетворювачем або термопарою. Місце з'єднання провідників, що знаходиться під впливом температури вимірюваного середовища, називається гарячим або робочим спаєм. Місце з'єднання провідників, що знаходиться під впливом температури навколишнього середовища, називається холодним або вільним спаєм. Різнорідні провідники А та В, які складають термоелектричний перетворювач, називаються термоелектродами. Для замкнутого ланцюга, що складається з двох провідників, термо-ЕРС рівна алгебраїчній сумі різниць потенціалів спаїв:
При однаковій температурі обох спаїв (Θ1 = Θ2) термо-ЕРС буде рівна нулю, оскільки eΘ1 = еΘ2. При різній температурі спаїв (Θ1 > Θ2) термо-ЕРС не рівна нулю, оскільки eΘ1 > еΘ2. Якщо температуру холодного спаю підтримувати постійною, то еΘ2 = const. Тому термо-ЕРС термопари змінюватиметься у функції температури гарячого спаю:
Для вимірювання термо-ЕРС електровимірювальні прилади включаються в ланцюг термопари або в розрив холодного спаю (мал. 4.18, б), або в розрив одного з електродів (мал. 4.18, в). У першому випадку перетворювач має один гарячий і два холодні спаї. При постійності і рівності температур холодних спаїв термо-ЕРС залежатиме лише від температури гарячого спаю. У другому випадку перетворювач має чотири спаї: один гарячий, один холодний і два нейтральних. При постійності температури холодного спаю і рівності температур нейтральних спаїв термо-ЕРС залежатиме лише від температури гарячого спаю. Таким чином, введення третього провідника в ланцюг термоелектричного перетворювача не змінює результуючу термо-ЕРС за умови рівності температур в місцях підключення третього провідника.
Для підвищення вихідної термо-ЕРС застосовують послідовне включення декількох перетворювачів, утворюючих термобатарею. Для зручності порівняння термоелектричних властивостей різних матеріалів на рис. 4.19 приведені криві термо-ЕРС різних металів і сплавів в парі з платиною при температурах гарячого спаю Θ1 = 100°С і холодного спаю Θ2 = 0°С.
Позитивними називають матеріали, у яких в парі з платиною струм в гарячому спаї тече від платини до матеріалу, а негативними — матеріали, в яких струм тече від матеріалу до платини. Приведені криві дозволяють будувати градуїровочні криві для будь-якої пари матеріалів, оскільки термо-ЕРС пари рівна алгебраїчній різниці термо-ЕРС вибраних матеріалів в парі з платиною. Звичайно температура вільних кінців термопари вища за нуль. Тому термо-ЕРС не відповідає істинному значенню вимірюваної температури. Зміна температури холодного спаю призводить до зміни термо-ЕРС при незмінній температурі гарячого спаю, тобто до виникнення погрішності. Термоелектроди мають невелику довжину, унаслідок чого головка, в якій закріплюються вільні кінці термопари, знаходиться в безпосередній близькості від місця вимірювання. При цьому температура в місці розташування головки виявляється відносно високою і змінною в значних межах. Для зменшення погрішності вимірювання термоелектроди штучно подовжують, і вільні кінці виносять в зручніше місце. В більшості випадків подовжуючі частини термоелектродів виготовляють з тих же матеріалів, що і самі термоелектроди термопари. У термопар з електродами з благородних металів і сплавів, наприклад у платінородієвій термопарі, подовжуючі частини термоелектродів виготовляють з міді і сплаву, що складається з 99,4% Сu і 0,6% Ni. З великої кількості термоматеріалів на практиці для виготовлення позитивного термоелектрода найбільш ширше використовують хромель, залізо, платінородій, сплав нікелю з кобальтом, а для виготовлення негативного термоелектрода — алюмель, константан, капіж, платину, спеціальний алюмель.
Конструктивно термопара є двома дроту з різнорідних матеріалів, гарячий спай яких скручується, а потім зварюється. Гарячий спай ізолюється фарфоровим наконечником. Сама термопара полягає в кожух, який захищає її від дії гарячих, хімічно агресивних газів. Термопари з благородних матеріалів відрізняються стабільністю характеристик і стійкістю до впливу зовнішнього середовища. Недоліком є невелике значення термо-ЕРС, набагато менше, ніж у термопар з неблагородних матеріалів (хромель — алюмель, хромель — крапель). Термоелектроди з благородних металів виготовляють з дроту діаметром 0,5 мм, термоелектроди з неблагородних матеріалів — з дроту діаметром від 1,5 до 3 мм. На судах знайшли також застосування термопари з термоелектродами з нікелю — сплаву хрому з нікелем, заліза — константану. Для всіх вживаних термопар функціональна залежність між термо-ЕРС і вимірюваною температурою має складний характер. Термо-ЕРС термопар вимірюється за допомогою мілівольтметра, який має коректор для установки стрілки на відмітку, відповідну температурі вільних кінців термопари. Шкала мілівольтметра градуюється з урахуванням зовнішнього опору електричного ланцюга. У приладі є подстроєчні резистори, що дозволяють набути необхідне значення зовнішнього опору. На автоматизованих судах термопари працюють спільно з вимірювально-інформаційними системами, на вхід яких повинні подаватися уніфіковані сигнали. Вихідний сигнал термопари приводиться до уніфікованого вигляду за допомогою нормуючого перетворювача. Термопару можна вважати аперіодичною ланкою першого порядку, постійна часу якого коливається від 10 с до 7 хв.
Індуктивні перетворювачі Устрій і принцип роботи простого індуктивного перетворювача. Індуктивні перетворювачі служать для перетворення кутових і лінійних переміщень в електричний сигнал. На мал. 4.20 показана схема простого індуктивного перетворювача, що складається з магнітного осерді 1 з обмоткою 2 і якорі 3, Між полюсами осерді і якорем є повітряний зазор д. Без урахування потоків розсіяння потокозчеплення W обмотки зраджується пропорційно протікаючому в ній струму i:
де L — індуктивність обмотки; i — миттєве значення струму. Потокозчеплення рівне Ψ = wФ, де w — число витків обмотки; Ф — магнітний потік, створюваний обмоткою. З урахуванням останнього виразу індуктивність обмотки рівна
Магнітний потік обмотки визначається магніторушійною силою F магнітним опором перетворювача RM:
Вираз для потоку справедливий без урахування втрат в сердечнику і якорі перетворювача. Магнітний опір перетворювача визначається магнітним опором повітряного зазора RMB і магнітним опором осерді і якоря, виконаних із сталі, Rм.ст:
де μ0 — магнітна постійна; S — площа поперечного перетину магнітопровода; lСТ — довжина магнітної силової лінії в сердечнику і якорі; μr — відносна магнітна проникність матеріалу магнітопроводу. Оскільки магніторушійна сила рівна F=iw, то для індуктивності обмотки одержимо наступний вираз:
Індуктивний опір обмотки
де ω=2πf, f— частота живлячої мережі.
де R = RH + RП; RH — опір навантаження; RП — активний опір обмотки перетворювача. Діюче значення вихідної напруги перетворювача
де I, U — діючі значення струму перетворювача і напруги живлення. З (4.5) видно, що вихідна напруга при заданих параметрах мережі і незмінних конструктивних параметрах перетворювача залежить від величини повітряного зазору. У більшості конструкцій індуктивних перетворювачів величина повітряного зазору така, що RМВ >> RМ.СТ. Тому опором RМ.СТ можна нехтувати. Крім того, звичний індуктивний опір обмотки значно більше її активного опору і опору навантаження. В цьому випадку для вихідної напруги можна знайти інший вираз:
Відмінність реальної характеристики від лінійної при малих значеннях δ пояснюється тим, що при таких δ магнітний опір магнітопроводу перетворювача стає сумірним з магнітним опором повітряного зазору, тому нехтування величиною RМ.СТ призводить до появи погрішності. Відхилення реальної характеристики від лінійної функції при великих значеннях δ пояснюється іншим допущенням, відповідно до якого активний опір вважається дуже малим в порівнянні з індуктивним опором обмотки. При великих значеннях δ індуктивність значно зменшується, тому індуктивний опір стає сумірним з активним опором, що і викликає відхилення характеристики. Розглянутий індуктивний перетворювач має наступні недоліки: 1) фаза вихідної напруги залежить від величини повітряного зазору; 2) на якір постійно діє електромагнітна сила, що прагне притягти його до полюсів осерді. Через вказані недоліки розглянуті індуктивні перетворювачі застосовуються рідко.
Реверсивні індуктивні перетворювачі. Реверсивні індуктивні перетворювачі набули найширше поширення. Існують дві основні схеми включення реверсивних індуктивних перетворювачів: диференціальна і мостова. Диференціальна схема включення показана на рис. 4.22, а. Реверсивний індуктивний перетворювач складається з двох простих. Магнітна система має два однакові осердя I і I I і спільний якір I I I. Обмотки осердь містять однакове число витків. Опір навантаження включається між середньою точкою вторинної обмотки трансформатора TV і середньою точкою обмоток осердя. При такому включенні струм навантаження рівний різниці струмів верхньої і нижньої половин схеми:
При активному навантаженні ZН = RH вихідна напруга рівна
У нейтральному положенні якоря (х = 0) зазори між полюсами осердя і якорем однакові: δ1 = δ2 = δ0 Індуктивності обмоток також рівні: L1 = L2, тому струми I1 і I2 рівні по модулю, а струм навантаження I = 0. Отже, і вихідна напруга перетворювача рівна нулю. Таким чином, при вхідному сигналі, рівному нулю, вихідний сигнал також рівний нулю. Переміщення якоря вгору приведе до зменшення верхнього повітряного зазору і збільшення нижнього:
де х — переміщення якоря. Зміна зазорів спричинить збільшення індуктивного опору обмотки верхнього осердя і зменшення індуктивного опору обмотки нижнього осердя. При цьому струм I1 зменшиться, а струм I2 зросте. У навантаженні потече результуючий струм і з'явиться вихідна напруга. Зміна напряму переміщення якоря від нейтрального положення приведе до зростання струму I1 і зменшення струму I2, що спричинить появу результуючого струму, фаза якого на 180º відрізнятиметься від фази результуючого струму при первинному напрямі переміщення. Залежність напруг U1 і U2 від переміщення можна одержати, скориставшись кривою на рис0. 4.21. При побудові кривих слід врахувати, що δ1 змінюється від 0 до 2δ0 при зміні х від хmax до –xmax, а δ2 змінюється від 0 до 2δ0 при зміні х від –хmax до хmax. На рис. 4.22, б показані криві U1 =f(x), U2 =f(x) і крива вихідної напруги, побудована відповідно до виразу (4.6). Характеристика UВЫХ = f(x) проходить через початок координат. Зміна знаку UВЫХ при зміні знаку х умовно позначає зміну фази вихідної напруги перетворювача на 180°. У мостовій схемі реверсивного індуктивного перетворювача (рис. 4.23) обмотки осердь включаються в суміжні плечі моста. Вихідна напруга знімається з однією з діагоналей моста. Воно рівне різниці напруг:
де Вираз (4.7) можна представити у вигляді
Реверсивні індуктивні перетворювачі в порівнянні з нереверсивними мають наступні переваги: 1) лінійна частина вихідної характеристики має велику протяжність; 2) електромагнітне зусилля, діюче на якір, значно менше зусилля в нереверсивному перетворювачі. Це пояснюється частковою компенсацією електромагнітних зусиль, діючих із сторони осердь I і II. Повна компенсація відбувається в нейтральному положенні якоря.
Розглянуті реверсивні індуктивні перетворювачі дозволяють вимірювати переміщення від декількох мікрон до десятих часток міліметра. Нижня межа обумовлена технологічними труднощами створення малих повітряних зазорів. Верхня межа пояснюється значним зменшенням чутливості при великих повітряних зазорах через появу потоків розсіяння. Для вимірювання великих переміщень застосовуються циліндрові реверсивні індуктивні перетворювачі. На рис. 4.24 показаний реверсивний індуктивний перетворювач, у якого робочий діапазон вимірюваних переміщень досягає декількох міліметрів. Магнітопровід перетворювача 2 виконується у вигляді циліндрової трубки, яка разом з двома кришками 4 виконує роль ярма. Якір 3 також має циліндрову форму. Диск 1 з феромагнітного матеріалу призначений для збільшення магнітної провідності між трубкою і якорем. По обидві сторони від диска встановлюються дві циліндрові котушки 5. Як правило, перетворювач має дві однакові котушки. Принцип дії перетворювача аналогічний принципу дії реверсивного індуктивного перетворювача, розглянутого вище.
Через електричну і магнітну асиметрію нейтральне геометричне розташування якоря (х = 0) не відповідає дійсному нейтральному положенню. Реверсивні перетворювачі мають залишкову напругу, яка містить синфазну і квадратурну складові, а також вищі гармоніки. Синфазну складову можна звести до нуля переміщенням якоря в ту або іншу сторону. Квадратурна і вищі гармонійні складові переміщенням якоря не компенсуються. Тому при будь-якому положенні якоря вихідна напруга перетворювача не рівна нулю. Початок відліку визначають при мінімальному значенні UВЫХ. Індуктивні перетворювачі знайшли застосування в датчиках рівня, тиску, стабілізаторах качання, системах кренування, системах контролю за збереженням поршневих кілець дизелів, датчиках переміщення рейки паливних насосів дизеля.
|
|||||||||
|
|
Последнее изменение этой страницы: 2016-09-19; просмотров: 1111; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.220.212.186 (0.029 с.) |
 У верхній частині рисунка зображені криві для матеріалів, що є позитивними по відношенню до платини, в нижній — негативними.
У верхній частині рисунка зображені криві для матеріалів, що є позитивними по відношенню до платини, в нижній — негативними.

 Опір електричного ланцюга перетворювача
Опір електричного ланцюга перетворювача
 (4.5)
(4.5)
 У одержаному виразі змінною величиною є δ. Графік даної залежності UВЫХ = f(δ) є прямою, що проходить через початок координат (рис. 4.21, штрихова лінія). Реальна характеристика, приведена на рис. 4.21, побудована на підставі виразу (4.5).
У одержаному виразі змінною величиною є δ. Графік даної залежності UВЫХ = f(δ) є прямою, що проходить через початок координат (рис. 4.21, штрихова лінія). Реальна характеристика, приведена на рис. 4.21, побудована на підставі виразу (4.5).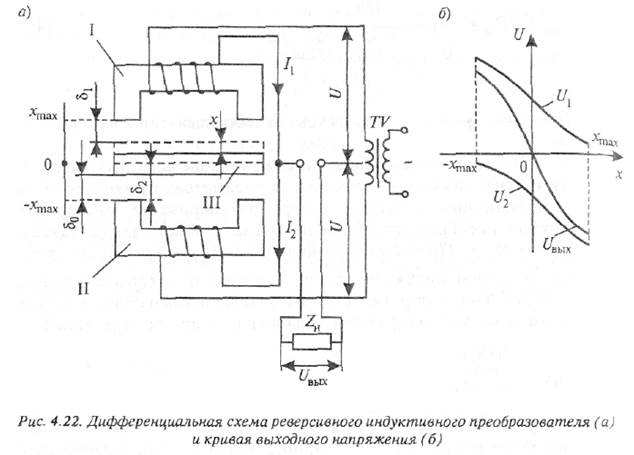
 (4.6)
(4.6)
 (4.7)
(4.7)
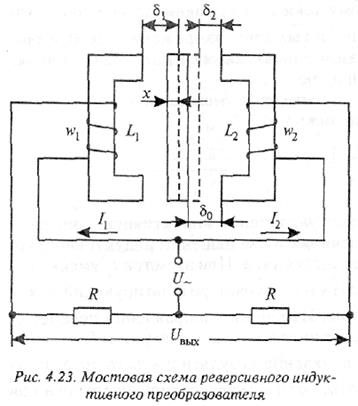 Одержаний вираз співпадає з (4.6). У мостовій схемі переміщення якоря також призводить до зміни струмів і появи вихідної напруги. Зміна напряму переміщення якоря викликає зміну фази вихідної напруги на 180°.
Одержаний вираз співпадає з (4.6). У мостовій схемі переміщення якоря також призводить до зміни струмів і появи вихідної напруги. Зміна напряму переміщення якоря викликає зміну фази вихідної напруги на 180°.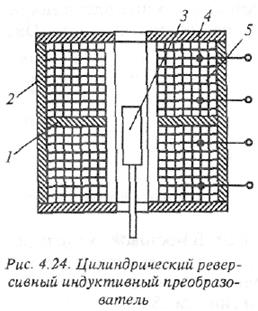 Включення циліндрових реверсивних індуктивних перетворювачів може вироблятися як по диференціальній, так і по мостовій схемам. Основним недоліком розглянутих індуктивних перетворювачів є наявність гальванічного зв'язку вихідного ланцюга з ланцюгом живлення, що ускладнює включення декількох перетворювачів для виконання рахунково-вирішальних операцій без застосування яких-небудь проміжних елементів.
Включення циліндрових реверсивних індуктивних перетворювачів може вироблятися як по диференціальній, так і по мостовій схемам. Основним недоліком розглянутих індуктивних перетворювачів є наявність гальванічного зв'язку вихідного ланцюга з ланцюгом живлення, що ускладнює включення декількох перетворювачів для виконання рахунково-вирішальних операцій без застосування яких-небудь проміжних елементів.


