
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Современные силовые преобразователиСтр 1 из 15Следующая ⇒
СОВРЕМЕННЫЕ СИЛОВЫЕ ПРЕОБРАЗОВАТЕЛИ МОЩНЫХ ЭЛЕКТРОПРИВОДОВ 1. ОБЩИЕ СВЕДЕНИЯ О СОВРЕМЕННЫХ ЧАСТОТНО-РЕГУЛИРУЕМЫХ ЭЛЕКТРОПРИВОДАХ 1 2. ОБЛАСТЬ ПРИМЕНЕНИЯ ЧАСТОТНО-РЕГУЛИРУЕМЫХ ЭЛЕКТРОПРИВОДОВ В ГОРНОЙ ПРОМЫШЛЕННОСТИ.. 9 3. ОСНОВНЫЕ ЗАКОНЫ СКАЛЯРНОГО УПРАВЛЕНИЯ ЧАСТОТНО-РЕГУЛИРУЕМЫХ ЭЛЕКТРОПРИВОДОВ.. 12 4. ЭФФЕКТИВНОСТЬ ПРИМЕНЕНИЯ ЧАСТОТНО-РЕГУЛИРУЕМЫХ ЭЛЕКТРОПРИВОДОВ 17 5. ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД С ВЕНТИЛЬНЫМ ДВИГАТЕЛЕМ 21 6. ЧАСТОТНО-РЕГУЛИРУЕМЫЕ ЭЛЕКТРОПРИВОДЫ РОССИЙСКИХ ИЗГОТОВИТЕЛЕЙ 25 7. ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ КОНЦЕРНА ABB.. 28 8. ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ ФИРМЫ «SIEMENS». 34 9. ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ КОМПАНИИ «SCHNEIDER ELECTRIC». 43 10. ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД ТЕХНОЛОГИЧЕСКИХ УСТАНОВОК МАГИСТРАЛЬНОГО ТРАНСПОРТА УГЛЕВОДОРОДНОГО СЫРЬЯ.. 47 11. ПРЕИМУЩЕСТВА УСТРОЙСТВ ПЛАВНОГО ПУСКА ПО СРАВНЕНИЮ С ТРАДИЦИОННЫМИ ПУСКОВЫМИ УСТРОЙСТВАМИ.. 61 12. ПРИНЦИП ДЕЙСТВИЯ И СИСТЕМА УПРАВЛЕНИЯ.. 64 13. ДИАГРАММА ИЗМЕНЕНИЯ НАПРЯЖЕНИЯ НА ЗАЖИМАХ СТАТОРА ДВИГАТЕЛЯ. ОСНОВНЫЕ СПОСОБЫ УПРАВЛЕНИЯ.. 68 14. КРИТЕРИИ ВЫБОРА УСТРОЙСТВА ПЛАВНОГО ПУСКА.. 71 15. ОСОБЫЕ СЛУЧАИ ПРИМЕНЕНИЯ.. 76 16. ФУНКЦИИ ЗАЩИТ УСТРОЙСТВА ПЛАВНОГО ПУСКА И ДВИГАТЕЛЯ.. 78 17. ФУНКЦИИ КОНТРОЛЯ.. 82 18. ПРОГРАММНЫЕ СРЕДСТВА НАСТРОЙКИ.. 84 19. СОВРЕМЕННАЯ ЭЛЕМЕНТНАЯ БАЗА СИЛОВОЙ ЭЛЕКТРОНИКИ.. 87 20. ВЫПРЯМИТЕЛИ.. 98 21. ИНВЕРТОРЫ... 107 22. ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ... 111 23. РЕВЕРСИВНЫЕ ТИРИСТОРНЫЕ ПРЕОБРАЗОВАТЕЛИ.. 117 24. СИСТЕМЫ УПРАВЛЕНИЯ ПОЛУПРОВОДНКОВЫМИ ПРЕОРАЗОВАТЕЛЯМИ.. 122 25. ЗАЩИТА ПОЛУПРОВОДНИКОВЫХ ПРЕОБРАЗОВАТЕЛЕЙ.. 126 27. РЕВЕРСИВНЫЕ ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА ПО СИСТЕМЕ ТИРИСТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ - ДВИГАТЕЛЬ. 130 28. СПОСОБЫ ПОВЫШЕНИЯ КОЭФФИЦИЕНТА МОЩНОСТИ ЭЛЕТРОПРИВОДА С ПОЛУПРОВОДНИКОВЫМИ ПРЕОБРАЗОВАТЕЛЯМИ.. 135 29. ВОСЬМИРАЗРЯДНЫЕ МИКРОКОНТРОЛЛЕРЫ КОМПАНИИ FREESCALE SEMICONDUCTOR В КОРПУСАХ С МАЛЫМ ЧИСЛОМ ВЫВОДОВ.. 137 30. МОДЕЛЬНЫЙ РЯД МК.. 138 31. ТРИ ПРОЦЕССОРНЫХ ЯДРА HC08. 140 32. ПОДСИСТЕМА РЕАЛЬНОГО ВРЕМЕНИ.. 145
ОБЛАСТЬ ПРИМЕНЕНИЯ ЧАСТОТНО-РЕГУЛИРУЕМЫХ ЭЛЕКТРОПРИВОДОВ В ГОРНОЙ ПРОМЫШЛЕННОСТИ В настоящее время на всех стадиях добычи, первичной переработки и транспортировки горного сырья в основном применяются электроприводы переменного тока с асинхронными и синхронными электродвигателями.
Основные направления развития электропривода технологических установок горной промышленности совпадают с общей тенденцией развития электропривода на современном этапе - все более широким применением регулируемого электропривода и компьютерных средств автоматизации при создании нового и модернизации действующего технологического оборудования. Также следует отметить специфические для горной промышленности направления дальнейшего совершенствования электропривода — повышение надежности и взрывозащищенности. Перечислим эти направления. 1. Широкое применение полупроводниковых преобразователей для регулирования координат (скорости, положения, момента) электроприводов. 2. Стандартизация и унификация силового электрооборудования, повышение степени его заводской готовности. 3. Повышение КПД, коэффициента мощности и других технико-экономических показателей. 4. Создание серии комплектных электроприводов, включающих силовое электрооборудование, системы автоматического управления, контроля, защиты и диагностики. 5. Унификация и миниатюризация аппаратуры управления. 6. Применение средств вычислительной техники, использование модульного принципа построения систем управления. 7. Разработка типовых структур электроприводов. 8. Совершенствование конструкции двигателей, полупроводниковых преобразователей и аппаратуры управления с целью повышения надежности, взрывозащищенности и уменьшения массогабаритных показателей. В ближайшие годы основной объем внедрения регулируемых электроприводов в горной промышленности будет связан с ее реконструкцией. При этом наряду с заменой изношенного или морально устаревшего оборудования возможна модернизация существующих электрических машин и систем управления полупроводниковыми преобразователями и другими компонентами регулируемого электропривода. При этом ожидаемая экономия электроэнергии за счет внедрения регулируемого электропривода может составить до 40 % от ожидаемой экономии по всей совокупности мероприятий. Применение в горной промышленности регулируемых электроприводов позволяет повысить производительность рабочих машин и механизмов, автоматизировать многие технологические процессы, уменьшить энергопотребление и другие материальные затраты.
Рис. 13. Диаграмма изменения напряжения на зажимах статора двигателя, реализуемая устройством плавного пуска Приведем параметры пусковой диаграммы изменения напряжения, реализуемой УППТ концерна ABB. Первоначальная уставка пускового начального напряжения В случае снижения нагрузки на валу АД УППТ автоматически снижает напряжение на зажимах статора АД до значения 0,6 В УППТ могут быть реализованы следующие способы управления: напряжением на зажимах статора, током двигателя, моментом двигателя. Управление напряжением обеспечивает плавный пуск двигателя, однако ток и момент двигателя при пуске не контролируются. Поскольку отсутствуют обратная связь по току и контроль момента двигателя, при пуске возможны броски тока (рис. 14, а). Данный способ управления не пригоден для электроприводов с тяжелым пуском. Управление током обеспечивает при пуске ограничение пускового тока. Изменение напряжения на зажимах статора происходит таким образом, что в течение большей части времени пуска ток двигателя поддерживается постоянным (рис. 14, б). Уровень ограничения пускового тока является основным параметром пуска и устанавливается пользователем в зависимости от конкретного применения.
Рис. 14. Графики изменения во времени тока при пуске электродвигателя от УППТ при способах управления: а — напряжением на зажимах статора; б — током; в — моментом двигателя; Осциллограмма пускового тока двигателя, управляемого от устройства плавного пуска при управлении током, показана на рис. 15.
Рис. 15. Осциллограмма пускового тока двигателя, управляемого от устройства плавного пуска при управлении током
Управление моментом является наиболее совершенным способом пуска. В этом случае УППТ следит за требуемым значением момента, обеспечивая пуск с минимальным значением тока. Применение системы управления с контролем момента двигателя обеспечивает линейный график изменения скорости во времени, т.е. пуск при постоянном ускорении.
В некоторых УППТ возможна реализация специальной функции управления насосом. График изменения во времени тока для такого управления показан на рис. 14, в. В случае пробоя тиристора предусмотрена функция аварийного прямого пуска двигателя, которая доступна только при управлении напряжением. При аварийном пуске управление С помощью УППТ могут быть реализованы следующие способы торможения двигателя:
Для предохранения двигателя от замерзания и перепадов температуры, что может привести к образованию конденсата и вследствие этого к увлажнению изоляции, предусмотрен предварительный обогрев двигателя. При этом в обмотку статора заторможенного двигателя подается небольшой ток. Значение тока и время подогрева настраиваются программными средствами. При предварительном подогреве двигателя защита от тепловой перегрузки блокируется.
ОСОБЫЕ СЛУЧАИ ПРИМЕНЕНИЯ Параллельное подключение нескольких двигателей допускается в пределах мощности УППТ (суммарный ток подключенных двигателей должен быть равен или меньше номинального тока УППТ). Двигатель с фазным ротором с закороченной обмоткой ротора развивает слабый пусковой момент. С целью увеличения пускового момента целесообразно в цепь ротора ввести небольшое сопротивление. Возможен пуск двигателя с фазным ротором при закороченной обмотке ротора. Однако пусковой ток в этом случае может достичь 7-кратного значения, что потребует применения УППТ на одну ступень выше по мощности. Двухскоростной двигатель. В избежание больших бросков тока, обусловленных противофазным состоянием ЭДС двигателя и напряжения сети, переход с одной скорости на другую осуществляется с выдержкой времени. Устройство, переключающее число полюсов, должно быть подключено между выходом УППТ и двигателем. Шунтирование устройства с помощью контактора. По окончании процесса пуска УППТ может быть зашунтировано контактором. В отличие от сетевого контактора, рассчитанного на режим АС-3 (пусковой ток), шунтирующий контактор может быть рассчитан на режим АС-1, так как пропускает номинальный ток. Шунтирующий контактор управляется УППТ, причем функции защит остаются активными после шунтирования. При работе с шунтирующим контактором сохраняются все виды останова двигателя (свободный выбег, динамическое торможение). Если после завершения пуска УППТ закорочено и следующий пуск двигателя осуществляется из холодного состояния УППТ, то можно повысить типоразмер подключаемого двигателя. Если же УППТ работает без шунтирования после завершения пуска, то завышать типоразмер подключенного двигателя не следует.
Устройство плавного пуска, включаемое последовательно с обмоткой двигателя в каждой фазе, соединенное по схеме треугольник (внутренний треугольник). Кроме наиболее часто встречающихся схем управления двигателем, обмотка которого соединена по схеме звезда или треугольник, УППТ Altistart 48 может включаться по схеме, представленной на рис. 17. В этом случае он обтекается током в 1,7 раза меньше линейного, что позволяет использовать УППТ меньшей мощности. Для этих целей используются специальные УППТ Altistart...Q, имеющие в обозначении букву Q. Такой способ допускает останов двигателя только на свободном выбеге и не совместим с функцией предварительного подогрева двигателя перед пуском. При этом настройки номинального тока и тока ограничения остаются выраженными в значениях линейного тока, что дает возможность пользователю не прибегать к вычислениям.
Рис. 17. Соединение обмоток статора двигателя с устройством плавного пуска последовательно в каждой фазе по схеме треугольник
Подключение нескольких устройств плавного пуска к одному источнику питания. Для обеспечения требований электромагнитной совместимости между сетевым контактором и УППТ устанавливается сетевой дроссель. Использование сетевых дросселей особенно рекомендуется в случае подключения нескольких УППТ к одному источнику сетевого питания. Другие рекомендации по применению. Нельзя от УППТ питать никакие другие приемники, кроме двигателей. Например, запрещено подключать тепловые приборы. Нельзя к клеммам двигателя подключать компенсаторы реактивной мощности. При использовании компенсаторов реактивной мощности они должны устанавливаться на входе УППТ и подключаться к питанию только после завершения процесса пуска двигателя. Активизация функции каскадного пуска. Активизация этой функции позволяет последовательно осуществлять пуск нескольких двигателей одинаковой мощности от одного УППТ. В этом случае тепловая защита двигателя по математической модели теплового состояния исключается, а реле R1 (см. рис. 12) должно быть сконфигурировано в качестве реле изолирования. Автоматический повторный пуск. Эта функция доступна при 2-проводном управлении. Ее активизация позволяет после блокировки по неисправности провести несколько последовательных попыток пуска с установленным интервалом времени (в УППТ Altistart 48 шесть пусков с интервалом 60 с) при условии, если неисправность устранена и команды управления сохраняются. После последней попытки пуска УППТ блокируется и требуется устранить неисправность перед повторным пуском.
Толчковый режим на малой скорости. Некоторые УППТ, например MSF фирмы «Emotron», имеют возможность получения толчкового режима работы при медленной скорости с запретом команды вращения двигателя назад или вперед. Этот режим необходим для рабочих машин, требующих точного позиционирования исполнительного органа.
ФУНКЦИИ КОНТРОЛЯ
Система контроля УППТ позволяет персоналу следить за многими параметрами электропривода и технологического процесса, а при выходе их за допустимые пределы своевременно сигнализировать об этом. При аварийном отключении оператор может выяснить причины аварии и просмотреть содержание архива неисправностей, хранящихся в памяти системы управления УППТ. В процессе функционирования УППТ на экран индикатора может быть выведена следующая информация:
При срабатывании защит на экране индикатора УППТ возможно отображение информации об отключениях по следующим причинам:
Системы защит и контроля УППТ могут настраиваться:
В памяти системы управления УППТ в процессе эксплуатации могут накапливаться следующие данные: общее время работы, общее число пусков, общее число остановов, продолжительность последнего пуска, максимальный ток при последнем пуске и др. Устройство плавного пуска и торможения может иметь систему защит самого себя, двигателя и механизма Сигналы тревоги УППТ подразделяются на три категории: Категория 1. Сигналы, приводящие к останову двигателя и требующие перезапуска до подачи следующего сигнала пуска. При появлении сигнала тревоги категории 1 работа УППТ останавливается. В этом случае требуется сигнал перезапуска прежде, чем может быть принята команда на пуск. Перезапуск возможен с клавиатуры (нажатием клавиши RESET). Перезапуск будет выполнен только в том случае, если причина ошибки и сигнала тревоги устранена. После перезапуска реле неисправностей возвращается в неактивное состояние, индикация ошибки исчезает и на дисплее появляется стандартное окно меню. После перезапуска система готова к новой команде пуска. Категория 2. Сигналы, приводящие к останову двигателя и допускающие сигналы пуска без перезапуска При появлении сигнала тревоги категории 2 работа УППТ останавливается. Можно сразу подать команду на пуск, при этом реле неисправностей возвращается в неактивное состояние, индикация ошибки исчезает и на дисплее появляется стандартное окно меню. В этом случае возможна также подача команды на перезапуск как и для сигналов тревоги категории 1, если пуск в данный момент не требуется. Категория 3. При появлении сигнала тревоги категории 3 работа УППТ продолжается. Возможно несколько способов возвращения к обычному функционированию:
После перезапуска реле неисправностей возвращается в неактивное состояние, индикация ошибки исчезает и на дисплее появляется стандартное окно меню. Все сигналы тревоги, кроме предварительных, активизируют реле неисправностей, вызывают появление сигнала ошибки и помещаются в список сигналов тревоги. Пока сигнал тревоги активен, на дисплее не может появиться другая информация. Рис.19. фрагмент программы контроля настройки параметров устройстваплавного пуска фирмы «Emotron»
Для облегчения наладки УППТ компанией «SchneiderElectrics» разработаны диалоговые средства Power Suite на базе персонального или карманного ПК, которые позволяют осуществлять подготовку файлов данных, загружаемых в УППТ. ВЫПРЯМИТЕЛИ С помощью выпрямителей осуществляется преобразование энергии переменного тока в энергию постоянного тока. Выпрямители широко применяются в электроприводе постоянного тока, в частотно-регулируемых электроприводах переменного тока, в системах возбуждения синхронных двигателей. Выпрямители классифицируются по нескольким признакам. По числу фаз напряжения переменного тока их подразделяют на однофазные и трехфазные, а по виду схемы силовой части — на мостовые и с нулевым выводом. По управляемости (возможности регулирования напряжения на выходе выпрямителя) их подразделяют на неуправляемые, полууправляемые и управляемые. Выпрямители, позволяющие изменять полярность своего выходного напряжения, называются реверсивными, они обычно состоят из двух комплектов нереверсивных выпрямителей. В силовой части неуправляемых выпрямителей используются диоды и их модули, в полууправляемых — диоды и тиристоры, а управляемых — тиристоры. Для согласования уровней переменного (входного) напряжения и постоянного (выходного) напряжения в схемах выпрямителей используются трансформаторы, которые одновременно выполняют роль гальванической развязки цепей переменного и постоянного тока. В промышленных установках применяют различные схемы преобразования переменного тока в постоянный, каждая из которых имеет свои достоинства и недостатки. При сравнении различных схем выпрямления учитывают следующие их технические характеристики: число полупроводниковых приборов, коэффициент пульсаций выпрямленного напряжения, габаритную мощность трансформатора. Рассмотрим типовые схемы выпрямления переменного тока. Однофазная мостовая схема содержит четыре диода V1 — V4, соединенных по схеме моста и подключенных к сети переменного тока через трансформатор Т или напрямую. Трансформатор позволяет согласовать напряжение сети и выпрямленное напряжение нагрузки. В одну диагональ моста (точки 1 и 3) включен источник переменного напряжения, а в другую (точки 2 и 4) — нагрузка RH. Общая точка 2 катодных выводов служит положительным полюсом выпрямителя, а точка 4 анодных выводов — отрицательным. В однофазной мостовой схеме диоды работают поочередно парами VI, V3 и V2, V4.
Однофазные мостовые схемы из-за больших пульсаций выпрямленного напряжения применяют в основном в электроустановках малой мощности. Трехфазная нулевая схема выпрямления (рис. 5.7, а) состоит из трех диодов. Анодные выводы диодов обычно подключают к обмоткам трансформатора, а катодные выводы — к общей точке. Нагрузку включают между нулевой точкой трансформатора и общей точкой диодов. При активной нагрузке RH ток через каждый диод протекает в течение 1/3 периода переменного тока, когда напряжение в одной фазе трансформатора больше, чем в других, а выпрямленный ток проходит по нагрузке непрерывно (см. рис. 5.7, в). В момент пересечения положительных значений напряжений каждой фазы трансформатора в точках а, б и в (см. рис. 5.7, б), называемых точками естественной коммутации диодов, ток прекращает проходить в одном диоде и начинает протекать через другой диод. Трехфазная нулевая схема позволяет получать выпрямленное напряжение более сглаженной формы с переменной составляющей Ud~ меньшей амплитуды, чем однофазная мостовая. Наибольшее обратное напряжение Uобр. max, поступающее на закрытый диод, равно амплитудному значению линейного напряжения (см. рис. 5.7, г).
Трехфазная мостовая схема выпрямления (рис. 5.8, а) состоит из шести диодов, которые образуют две группы: с общим катодным выводом (V1, V3 и V5) и общим анодным выводом (V2, V4 и V6). Диоды подключаются непосредственно к сети или через трансформатор, первичные и вторичные обмотки которого соединены в звезду или треугольник. В трехфазной мостовой схеме в любой момент времени при активной нагрузке ток проходит через два диода — один из нечетной, а другой — из четной группы. Диоды нечетной группы коммутируются в момент пересечения положительных участков синусоид (точки а, б, в), а четной группы — в момент пересечения отрицательных участков (точки г, д, е). В результате при наличии двух групп получают шестипульсное выпрямление (кривая Ud0, см. рис. 5.8, б). Достоинствами трехфазных мостовых схем, широко применяемых в выпрямительных устройствах, являются: небольшой коэффициент пульсаций выпрямленного напряжения; малое обратное напряжение; малая габаритная мощность трансформаторов; отсутствие вынужденного подмагничивания, так как ток во вторичной обмотке трансформатора изменяет свое направление. Управляемые выпрямители позволяют преобразовать переменный ток в постоянный и плавно изменять выпрямленное напряжение от нуля до максимального значения. В настоящее время в электроприводах постоянного тока и в системах возбуждения синхронных двигателей основной элементной базой при построении управляемых выпрямителей являются тиристоры. Тиристоры — не полностью управляемые полупроводниковые приборы, обладающие двумя устойчивыми состояниями равновесия: открытым (проводящим ток) и закрытым (не проводящим тока). Тиристор (рис. 5.9, а), имеющий три электрода (анодный вывод А, катодный К и управляющий электрод У), начинает проводить ток в том случае, если к анодному выводу (по отношению к катодному выводу) приложен положительный потенциал и одновременно к управляющему электроду подается положительный управляющий сигнал. При приложении к анодному выводу положительного потенциала сопротивление тиристора будет зависеть от управляющего тока. При отсутствии управляющего сигнала (Iу = 0) сопротивление тиристора велико. При появлении управляющего тока (Iу = Iун) тиристор перейдет в открытое состояние и проводимость его будет высокой. Тиристор отличается от транзистора тем, что ток управления только открывает, но не закрывает его. Закрывается тиристор при приложении к анодному выводу отрицательного напряжения. Для управления тиристором используют систему импульсно-фазного управления (СИФУ), которая формирует управляющий импульс нужной формы и мощности, а также осуществляет сдвиг по фазе импульса относительно напряжения сети. Рассмотрим работу тиристора, подключенного к однофазной сети на активную нагрузку (см. рис. 5.9, а). Предположим, что управляющий импульс в интервале Ωt0 - Ωt1 отсутствует (Iу = 0). В этом случае тиристор обладает большим сопротивлением в прямом направлении и ток через нагрузку RH практические не проходит (см. рис. 5.9, б).
Для изменения среднего значения выпрямленного напряжения Ud необходимо сдвинуть по фазе управляющий импульс. Так, для уменьшения выпрямленного напряжения необходимо управляющий импульс подавать с отставанием по отношению к точке естественной коммутации тиристора (см. рис. 5.9, в). Сдвиг по фазе между точкой естественной коммутации тиристора и моментом подачи управляющего импульса называется углом регулирования α. В электроприводах находят применение также сдвоенные тиристоры, называемые симмисторами, которые обладают свойствами встречно-параллельно соединенных тиристоров, но имеют лишь один управляющий электрод. При подаче управляющего сигнала симмистор открывается для обеих полуволн переменного тока. Однофазный полууправляемый преобразователь переменного тока в постоянный. В полууправляемом однофазном преобразователе, имеющем в плечах мостовой схемы управляемые и неуправляемые диоды, выходное напряжение всегда положительно, поэтому поток энергии направлен из сети к двигателю. В электропроводах с полууправляемыми преобразователями рекуперация энергии в сеть невозможна. Схема, графики токов и напряжений при симметричном управлении тиристорами и непрерывном токе якоря изображены на рис. 5.10.
В интервале открытого состояния тиристора (α < Ωt < π) энергия поступает из сети и преобразуется в энергию, запасаемую в индуктивности якорной цепи Lя, кинетическую энергию движущихся частей электропривода и полезную работу. В фазовом интервале π < Ωt < π + α тиристор закрыт, запасенная в индуктивности энергия преобразуется в механическую, а продолжающий протекать по якорной цепи ток iя создает электромагнитный момент. В этом интервале энергия в сеть не возвращается. Таким образом, в полууправляемом преобразователе происходит чередование интервалов, в одном из которых двигатель соединен с сетью через открытый тиристор, а в другом — отсоединен от сети. Уравнения для якорной цепи двигателя, управляемого от полууправляемого преобразователя, имеют вид:
где eя — ЭДС двигателя. При α = 0 и синусоидальной форме питающего напряжения среднее значение напряжения якорной цепи определяется по формуле
где U — действующее значение напряжения переменного тока на входе преобразователя. В связи с невозможностью рекуперации энергии в сеть электродвигатель, управляемый от полууправляемого преобразователя, работает только в первом квадранте механических характеристик.
Ток якоря двигателей i я, ранее протекающий через VS1 и VS3, теперь начнет протекать через тиристоры VS2 и VS4.
Уравнение для якорной цепи двигателя, управляемого от полностью управляемого преобразователя, имеет вид:
При синусоидальной форме питающего напряжения среднее значение напряжения якорной цепи для полностью управляемого преобразователя определяется по формуле
При α > 90° среднее значение напряжения якорной цепи становится отрицательным. Если ЭДС изменяет свою полярность вследствие изменения направления вращения вала двигателя на противоположное, а направление тока в якорной цепи остается неизменным, то электрическая машина работает как генератор, отдавая энергию в сеть. Режим работы преобразователя, при котором энергия возвращается в сеть, называется инверторным и применяется для рекуперативного торможения двигателя. Поскольку из-за односторонней проводимости тиристоров ток якоря не изменяет свое направление, а полярность напряжения якорной цепи может изменяться, электропривод с одним комплектом полностью управляемого преобразователя может работать в первом и четвертом квадрантах механических характеристик. В трехфазной мостовой схеме, в которой вместо диодов включены тиристоры (рис. 5.12, а), управляющие импульсы Uy1 – Uy2, поступающие от СИФУ, должны быть соответствующим образом сфазированы с напряжением трансформатора (сети), т.е. подаваться в нужные моменты времени. Сдвиг импульсов относительно базовой точки происходит в сторону отставания. За базовые необходимо брать точки а, б, в и г, д, е (см. рис. 5.12, б) естественного отпирания диодов. Если управляющие импульсы подавать на тиристоры в базовых точках, то получим наибольшее выпрямленное напряжение Ud0. При подаче управляющих импульсов с отставанием по отношению к точке естественного отпирания на угол α (рис. 5.12, б) тиристоры открываются позже, а среднее выпрямленное напряжение Ud ср будет меньше, чем наибольшее выпрямленное Ud0. Среднее выпрямленное напряжение ТП определяется по формуле Ud ср = Udo cosα, где α — угол регулирования ТП.
ИНВЕРТОРЫ Инвертированием называют процесс преобразования электрической энергии постоянного тока в переменный. Преобразователь, выполненный на базе полупроводниковых приборов и осуществляющий такое преобразование, называется инвертором. Автономным (самокоммутируемым и независимым) инвертором является преобразователь, выходные параметры которого (форма, амплитуда, частота выходного напряжения) определяются схемой преобразователя, системой управления и режимом его работы в отличие от инвертора, ведомого сетью, выходные параметры которого определяются параметрами сети. В автономных инверторах коммутация вентилей осуществляется либо включением и выключением полностью управляемых полупроводниковых приборов, либо с помощью устройств принудительной коммутации, входящих в состав схемы преобразователя и создающих коммутируемое напряжение, обеспечивающее включение не полностью управляемых полупроводниковых приборов.
|
|||||||||||||||
|
|
Последнее изменение этой страницы: 2016-09-18; просмотров: 639; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.191.13.255 (0.096 с.) |
 может варьироваться в пределах 10-60 % от номинального значения, что обеспечивает необходимый уровень пускового момента АД. Если при пуске АД требуется создать увеличенный пусковой момент для преодоления момента сопротивления, обусловленного силами трения покоя, то возможно кратковременное в течение времени
может варьироваться в пределах 10-60 % от номинального значения, что обеспечивает необходимый уровень пускового момента АД. Если при пуске АД требуется создать увеличенный пусковой момент для преодоления момента сопротивления, обусловленного силами трения покоя, то возможно кратковременное в течение времени  = 0,5 с приложение к статору импульса напряжения с амплитудой 90 % от
= 0,5 с приложение к статору импульса напряжения с амплитудой 90 % от  . Продолжительность пуска
. Продолжительность пуска  может варьироваться в пределах от 0,5 до 60 с, а продолжительность торможения
может варьироваться в пределах от 0,5 до 60 с, а продолжительность торможения  — от 0 до 240 с. Пусковой ток АД может устанавливаться в пределах (2 – 5)
— от 0 до 240 с. Пусковой ток АД может устанавливаться в пределах (2 – 5)  , а диапазон изменения конечного напряжения
, а диапазон изменения конечного напряжения  — 30—100 % от
— 30—100 % от  ) и экономии электроэнергии без ущерба работоспособности привода. Однако это снижение напряжения возможно не ранее чем через 60 с после завершения разгона двигателя. Режим энергосбережения становится недоступен, если в системе управления предусмотрен шунтирующий контактор, который подключает напрямую по окончании процесса пуска АД к питающей сети в обход УППТ.
) и экономии электроэнергии без ущерба работоспособности привода. Однако это снижение напряжения возможно не ранее чем через 60 с после завершения разгона двигателя. Режим энергосбережения становится недоступен, если в системе управления предусмотрен шунтирующий контактор, который подключает напрямую по окончании процесса пуска АД к питающей сети в обход УППТ.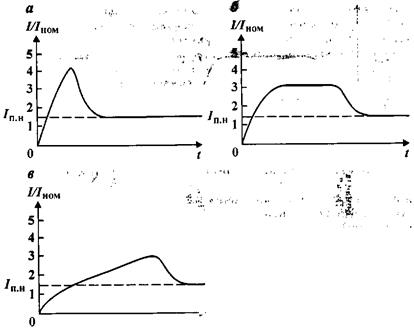
 — ток полной нагрузки
— ток полной нагрузки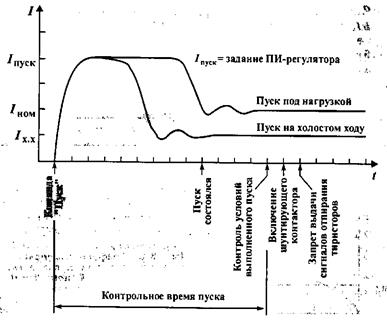


 Недостаток трехфазной нулевой схемы — прохождение через вторичные обмотки тока (ia2, ib2, ic2) только в одном направлении, что создает магнитный поток подмагничивания, вызывающий дополнительный нагрев трансформатора. Поэтому схему широко применяют только в выпрямительных установках с трансформаторами, ток вторичной обмотки которых не превышает 100 А.
Недостаток трехфазной нулевой схемы — прохождение через вторичные обмотки тока (ia2, ib2, ic2) только в одном направлении, что создает магнитный поток подмагничивания, вызывающий дополнительный нагрев трансформатора. Поэтому схему широко применяют только в выпрямительных установках с трансформаторами, ток вторичной обмотки которых не превышает 100 А.
 После подачи управляющего импульса при номинальном токе управления (Iу = Iун) тиристор открывается (см. рис. 5.9, в), т.е. его сопротивление в прямом направлении снижается. Под действием напряжения сети Uc через нагрузку RH проходит ток Iн (см. рис. 5.9, г), который зависит от напряжения сети и сопротивления резистора (интервал Ωt1 — Ωt2). При отрицательном напряжении на анодном выводе (интервал Ωt2 — Ωt3) тиристор обладает высоким сопротивлением и ток через него не проходит. В этом случае к тиристору прикладывается обратное напряжение Uобр (см. рис. 5.9, д). На рис. 5.9, б, д приняты обозначения: UH — напряжение на нагрузке; Uaк — напряжение анод — катод тиристора; Uyк — управляющее напряжение между управляющим электродом и катодом.
После подачи управляющего импульса при номинальном токе управления (Iу = Iун) тиристор открывается (см. рис. 5.9, в), т.е. его сопротивление в прямом направлении снижается. Под действием напряжения сети Uc через нагрузку RH проходит ток Iн (см. рис. 5.9, г), который зависит от напряжения сети и сопротивления резистора (интервал Ωt1 — Ωt2). При отрицательном напряжении на анодном выводе (интервал Ωt2 — Ωt3) тиристор обладает высоким сопротивлением и ток через него не проходит. В этом случае к тиристору прикладывается обратное напряжение Uобр (см. рис. 5.9, д). На рис. 5.9, б, д приняты обозначения: UH — напряжение на нагрузке; Uaк — напряжение анод — катод тиристора; Uyк — управляющее напряжение между управляющим электродом и катодом. В полууправляемом преобразователе тиристор VS1 переходит в открытое состояние в момент, соответствующий углу α, а тиристор VS2 — углу π + α относительно питающего напряжения u. В течение фазового интервала α < Ωt < π двигатель подключается к сети через тиристор VS1 и диод VD2, а напряжение на зажимах якорной цепи u я равно питающему u. При Ωt > π напряжение и изменяет полярность. Ток якоря iя теперь потечет через обратный диод VD0, поскольку тиристор VS1 закрыт. Обратный диод выполняет функцию защиты преобразователя от перенапряжений. В фазовом интервале π < Ωt < π+α цепь якоря закорочена обратным диодом, в связи с чем напряжение на якоре u я = 0.
В полууправляемом преобразователе тиристор VS1 переходит в открытое состояние в момент, соответствующий углу α, а тиристор VS2 — углу π + α относительно питающего напряжения u. В течение фазового интервала α < Ωt < π двигатель подключается к сети через тиристор VS1 и диод VD2, а напряжение на зажимах якорной цепи u я равно питающему u. При Ωt > π напряжение и изменяет полярность. Ток якоря iя теперь потечет через обратный диод VD0, поскольку тиристор VS1 закрыт. Обратный диод выполняет функцию защиты преобразователя от перенапряжений. В фазовом интервале π < Ωt < π+α цепь якоря закорочена обратным диодом, в связи с чем напряжение на якоре u я = 0.

 Однофазный полностью управляемый полупроводниковый преобразователь переменного тока в постоянный. В полностью управляемом преобразователе, показанном на рис. 5.11, а, тиристоры VS1 и VS3 переходят в открытое состояние одновременно в фазе α, a VS2 и VS4 — в фазе π + α. В этой схеме двигатель постоянно связан с сетью через пары тиристоров, причем в фазовом интервале α < Ωt < π + α открыты тиристоры VS1, VS3. В момент, соответствующий π + α, тиристоры VS2 и VS4 переходят в открытое состояние, при этом к тиристорам VS1 и VS3 через открытые тиристоры VS2 и VS4 прикладывается напряжение обратной полярности, которое закрывает их. Такая коммутация получила название естественной.
Однофазный полностью управляемый полупроводниковый преобразователь переменного тока в постоянный. В полностью управляемом преобразователе, показанном на рис. 5.11, а, тиристоры VS1 и VS3 переходят в открытое состояние одновременно в фазе α, a VS2 и VS4 — в фазе π + α. В этой схеме двигатель постоянно связан с сетью через пары тиристоров, причем в фазовом интервале α < Ωt < π + α открыты тиристоры VS1, VS3. В момент, соответствующий π + α, тиристоры VS2 и VS4 переходят в открытое состояние, при этом к тиристорам VS1 и VS3 через открытые тиристоры VS2 и VS4 прикладывается напряжение обратной полярности, которое закрывает их. Такая коммутация получила название естественной. В течение фазового интервала α < Ωt < π энергия из сети передается двигателю, поскольку u, i, и u я, i я положительны, см. рис. 5.11, б. Напротив, в течение фазового интервала π < Ωt < π + α часть энергии из якорной цепи возвращается в сеть, так как u я и i я, а также u и i, имеют разные знаки.
В течение фазового интервала α < Ωt < π энергия из сети передается двигателю, поскольку u, i, и u я, i я положительны, см. рис. 5.11, б. Напротив, в течение фазового интервала π < Ωt < π + α часть энергии из якорной цепи возвращается в сеть, так как u я и i я, а также u и i, имеют разные знаки.
 Поскольку трехфазная мостовая схема имеет две группы тиристоров, а ток в любой момент протекает минимум через два тиристора, СИФУ вырабатывает сдвоенные импульсы (см. рис. 5.12, б), сдвинутые относительно друг друга на 60 эл. град. В этом случае имеет место одновременная подача импульсов в тиристоры двух различных групп (V1 и V6, V1 и V2, V3 и V2, и т.д.). Наличие двух групп тиристоров обеспечивает шестипульсное выпрямление (кривая Ud, см. рис. 5.12, б).
Поскольку трехфазная мостовая схема имеет две группы тиристоров, а ток в любой момент протекает минимум через два тиристора, СИФУ вырабатывает сдвоенные импульсы (см. рис. 5.12, б), сдвинутые относительно друг друга на 60 эл. град. В этом случае имеет место одновременная подача импульсов в тиристоры двух различных групп (V1 и V6, V1 и V2, V3 и V2, и т.д.). Наличие двух групп тиристоров обеспечивает шестипульсное выпрямление (кривая Ud, см. рис. 5.12, б).


