Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Проектно-розрахунковий розділ
3.1. РОЗРОБКА СХЕМИ ЕЛЕКТРИЧНОЇ СТРУКТУРНОЇ
Основним вузлом системи являється однокристальний мікроконтролер сімейства MCS-51. Мікроконтролер призначений для аналізу вхідної інформації від давачів, відповідної обробки і видачі керуючих сигналів на відповідні пристрої. Для керування вхідними параметрами системи в схему введено клавіатуру. Опціонально, в схемі присутній датчик освітлення і схема зовнішнього освітлення. Індикатор служить для візуального спостереження результатів роботи пристрою. Живлення системи повинно бути стабільним. Для забезпечення схеми напругою живлення 5В використовується стабілізатор напруги.
Рис. 3.1.Структурна схема пристрою керування поворотним механізмом камери спостереження Структурна схема пристрою керування поворотним механізмом камери спостереження наведена на рис. 3.1.
3.2. РОЗРОБКА СХЕМИ ЕЛЕКТРИЧНОЇ ПРИНЦИПОВОЇ
В якості процесора виберемо мікроконтролер виробництва фірми ATMEL AT89S52. Особливості цього мікроконтролера: · Належить до сімейства MCS-51 · Ємкість перепрограмованої пам'яті Flash: 8 Кбайти · Діапазон робочої напруги 5В ±20% · Повністю статичний прилад – діапазон робочих частот від 0 Гц до 24 Мгц · Дворівневе блокування пам'яті програм · ОЗП ємкістю 128 байт · 32 програмованих ліній вводу/виводу · 2 16-розрядних таймера/лічильника подій · Шість джерел сигналу переривання AT89S52 розроблений за технологією КМОН. Мікроконтролер оснащений Flash програмованим ОЗП і ПЗП, що стирається, а також сумісний за системою команд і по виводах із стандартними приладами сімейства MCS-51. Об'єм Flash ПЗП - 8 Кбайт, ОЗП - 128 байтів. Має 32 ліній вводу/виводу, два 16-розрядних таймера/лічильника подій, повнодуплексний порт (UART) п'ять векторних дворівневих переривань, вбудований прецизійний аналоговий компаратор, вбудований генератор і схема формування тактової послідовності. Напруга програмування Flash пам'яті – 12 В і її вміст може бути захищений від несанкціонованого запису/зчитування. Є можливість очищення Flash пам'яті за одну операцію і можливість зчитування вбудованого коду ідентифікації. Струм споживання в активному режимі на частоті 12 Мгц не перевищує 15 мА при 5 В. В пасивному режимі (ЦПБ зупинений, але система переривань, ОЗП, таймер/лічильник подій і послідовний порт залишаються активними) споживання не перевищує 5 мА і 1мА. У стоповому режимі струм споживання не перевищує 100 мкА при напрузі живлення 5 В.
Важливою особливістю АЛП є його здатність оперувати не тільки байтами, але і бітами. Окремі програмно-доступні біти можуть бути встановлені, скинуті, інвертовані, передані, перевірені і використані в логічних операціях. Можливі модифікації цього мікроконтролера представлені у таблиці 3.1. Таблиця 3.1
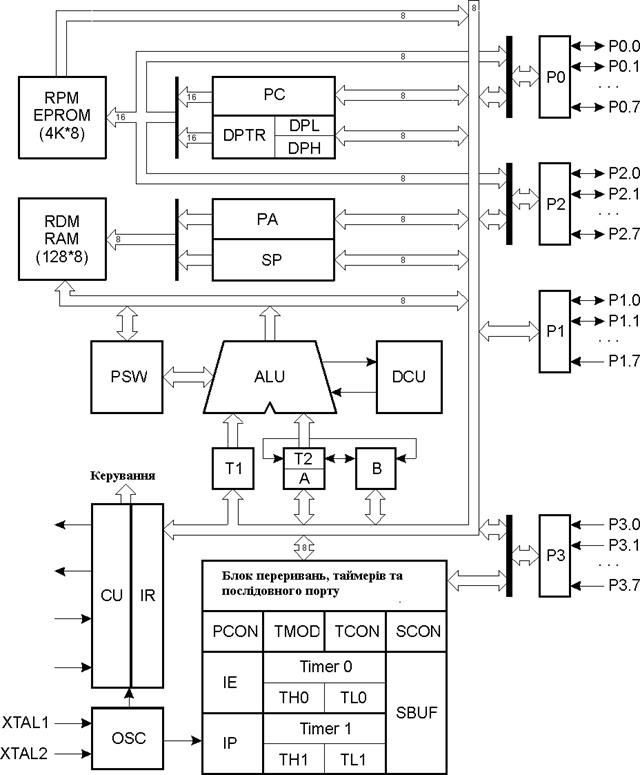
Структурна схема цього мікроконтролера представлена на рисунку 3.2.
Рис. 3.2. Структурна схема мікроконтролера
Рис. 3.3. Виводи мікроконтролера VCC – вивід живлення GND – земля XTAL1, XTAL2 – виводи для підключення кварцового резонатора; RESET – вхід загального скидання МК; PSEN – дозвіл зовнішньої пам'яті програм; ALE – строб адреси зовнішньої пам'яті; ЕА – відключення внутрішньої програмної пам'яті; P0 — восьмибітний двонапрямлений порт введення/виведення інформації. P1 – восьмибітний квазідвонапрямлений порт введення/виведення (кожен розряд порту може бути запрограмований як на введення, так і на виведення інформації); P2 – порт, аналогічний Р1; крім того, виводи цього порту використовуються для видачі адресної інформації при звертанні до зовнішньої пам'яті програм або даних; РЗ – аналогічний Р1; крім того, виводи цього порту можуть виконувати ряд альтернативних функцій, що використовуються при роботі таймерів, порту послідовного введення/виведення, контролера переривань, і зовнішньої пам'яті програм і даних;
Всі виводи порту P3 можуть бути використані для реалізації альтернативних функцій, які наведені в таблиці 3.2.
Таблиця 3.2.
Принципова схема контролера керування поворотом відеокамери подана на рисунку 3.4. Для задання робочої частоти процесора до входів XTAL підключений кварцовий резонатор BQ1, та конденсатори С2, С3. Оскільки мікроконтролер працює тільки з внутрішньою пам’яттю, то вивід EA підключений до схеми живлення +5В. До входу RST процесора підключена схема скиду. Включення схеми і встановлення в початковий стан відбувається після включення живлення.
Рис.3. 4. Схема електрична принципова
До ліній порту P0.0, P0.1, P0.2, P0.3 підключені кнопки керування, а саме: – Кнопка «Вліво»; – Кнопка «Вправо»; – Кнопка «Вверх»; – Кнопка «Вниз»; До лінії порту Р0.4 підключений фоторезистор, який призначений для аналізу рівня освітлення. До ліній порту Р2 і Р3 підключені семисегментні індикатори з відповідними мікросхемами зв’язку. До ліній порту Р1.0, Р1.1, Р1.2, Р1.3 підключений вихідний роз’єм для роботи з двигунами управління. Також до цього роз’єму підключена лінія порту Р1.4, яка відповідає за додаткове освітлення. Для вибору знакового розряду в схему введені два додаткові індикатори, які підключені до ліній порту Р1.6 та Р1.7. Для відображення інформації служить HL1, в якості якого виступає АЛС324Б (рис.3.2.4.)
Рис.3.2.4. Індикатор цифровий АЛС324Б ПРОГРАМНИЙ РОЗДІЛ 4.1. РОЗРОБКА АЛГОРИТМУ РОБОТИ І КОДУ ПРОГРАМИ
Алгоритмом називається директива, яка визначає порядок виконання дій (операцій) над даними з метою отримання шуканого результату. Процес підготовки розв’язку задачі на ЕОМ називається алгоритмізацією. Розробка алгоритму складається з декількох етапів: 1) Вивчення завдання даного для алгоритму задачі. Часто завдання представлене в описовій формі з використанням формул, таблиць, графіків і т. і.. Необхідно глибоко вивчити процес, що алгоритмізується, виявити закономірності явищ, що його складають. Визначається вхідна вихідна інформація, задаються області зміни аргументів, точність обчислень. Вхідна інформація повинна бути повною. 2) Виконується математична формалізація описової умови задачі. Її мета – побудувати масиви арифметичних і логічних операторів. До масиву логічних операторів входять всі умови що відображають закономірності процесу який алгоритмізуеться. 3) Будується схема алгоритму. Граф схема роботи програми керування контролером наведена на рис. 4.1. Робота пристрою починається з ініціювання системи. Система переходить в робочий стан.
Рис. 4.1. Граф схема алгоритму програми керування
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-08-26; просмотров: 104; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.191.108.168 (0.015 с.) |