
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Вопрос 6. Реакция якоря машины постоянного тока. Магнитное поле при нагрузке. Влияние реакции якоря на работу машин и ее устранение.
При работе электродвигателя магнитное поле якоря действует на магнитное поле полюсов. Следовательно, у двигателей, так же как и у генераторов, наблюдается реакция якоря. При одном и том же направлении тока в обмотке якоря и той же полярности полюсов направление вращения двигателя обратно направлению вращения генератора. При нагрузке машины в обмотке якоря протекает ток, который создает свое магнитное иоле. Поле якоря, воздействуя на магнитное поле полюсов, изменяет и искажает его. При нагрузке машины по магнитной цепи замкнется результирующий магнитный потом Фр, создаваемый совместным действием намагничивающих сил полюсов и якоря. Результирующий магнитный поток Фр не равен потоку полюсов Фт, созданному намагничивающими силами обмотки возбуждения при холостом ходе. Воздействие поля, созданного током в якоре при нагрузке машины, на магнитное поле полюсов называется реакцией якоря. Реакция якоря искажает магнитное поле машины, делает его несимметричным относительно оси полюсов.
Вопрос 46. Пусковые свойства асинхронных двигателей. Пуск двигателя с фазным ротором. Схема и процесс пуска. Пусковые свойства двигателя определяются в первую очередь значением пускового тока Iп или его кратностью Iп/ Iном и значением пускового момента Мп или его кратностью Мп/Мном. Двигатель, обладающий хорошими пусковыми свойствами, развивает значительный пусковой момент при сравнительно небольшом пусковом токе. Однако получение такого сочетания пусковых параметров в асинхронном двигателе сопряжено с определенными трудностями. В начальный момент пуска скольжение s = 1, поэтому, пренебрегая током х.х., пусковой ток можно определить подставив s = 1: Iп = U1/ Пусковой момент по Mп = Улучшить пусковые свойства двигателя можно увеличением активного сопротивления цепи ротора r2', так как в этом случае уменьшение пускового тока сопровождается увеличением пускового момента. В то же время напряжение U1 по-разному влияет на пусковые параметры двигателя: с уменьшением U1 пусковой ток уменьшается, что благоприятно влияет на пусковые свойства двигателя, но одновременно уменьшается пусковой момент. Целесообразность применения того или иного способа улучшения пусковых свойств двигателя определяется конкретными условиями эксплуатации двигателя и требованиями, которые предъявляются к его пусковым свойствам. Помимо пусковых значений тока Iп и момента Мп пусковые свойства двигателей оцениваются еще и такими показателями: продолжительность и плавность пуска, сложность пусковой операции, ее экономичность (стоимость и надежность пусковой аппаратуры и потерь энергии в ней). Пуск двигателя с фазным ротором. Наличие контактных колец у двигателей с фазным ротором позволяет подключить к обмотке ротора пусковой реостат. При этом активное сопротивление цепи ротора увеличивается до значения R2 = r2' + rд', где rд' — электрическое сопротивление пускового реостата, приведенное к обмотке статора. При выборе сопротивления пускового реостата rдоб исходят из условий пуска двигателя: если двигатель включают при значительном нагрузочном моменте на валу, сопротивление пускового реостата rдо6 выбирают таким, чтобы обеспечить наибольший пусковой момент; если же двигатель включают при небольшом нагрузочном моменте на валу, когда пусковой момент не имеет решающего значения для пуска, оказывается целесообразным сопротивление ПР rдоб выбирать несколько больше значения, соответствующего наибольшему пусковому моменту. В этом случае пусковой момент оказывается несколько меньшим наибольшего значения М п.mах, но зато пусковой ток значительно уменьшается.
Вопрос 48. Короткозамкнутые АД с улучшенными пусковыми характеристиками. Двигатель с глубокими пазами пазами на роторе и с двумя клетками на роторе. Конструкция, принцип действия, достоинства и недостатки. Двигатель с глубокими пазами на роторе. От обычного асинхронного двигателя этот двигатель отличается тем, что у него пазы ротора сделаны в виде узких глубоких щелей, в которые уложены стержни обмотки ротора, представляющие собой узкие полосы. С обеих сторон эти стержни приварены к замыкающим кольцам. Обычно глубокий паз имеет соотношение размеров hп/ bп = 9÷10, где hп, bп — высота и ширина паза. В момент включения двигателя, когда частота тока в роторе имеет наибольшее значение (f2 = f1), индуктивное сопротивление нижней части каждого стержня значительно больше верхней. Объясняется это тем, что нижняя часть стержня сцеплена с большим числом магнитных силовых линий поля рассеяния. Почти весь ток ротора проходит по верхней части стержня, поперечное сечение которой намного меньше сечения всего стержня. Это равноценно увеличению активного сопротивления стержня ротора, что, как известно, способствует росту пускового момента двигателя и некоторому ограничению пускового тока. Таким образом, двигатель с глубокими пазами на роторе обладает благоприятным соотношением пусковых параметров: большим пусковым моментом при сравнительно небольшом пусковом токе.
Двигатель с двумя клетками на роторе. Еще лучшими пусковыми свойствами обладают асинхронные двигатели с двумя короткозамкнутыми клетками на роторе: рабочей клеткой 1, стержни которой расположены в нижнем слое, и пусковой клеткой 2, стержни которой расположены в верхнем слое, ближе к воздушному зазору. В момент пуска двигателя ток ротора проходит в основном по верхней (пусковой) клетке, обладающей малым индуктивным сопротивлением. При этом плотность тока в стержнях пусковой клетки намного больше плотности тока в стержнях рабочей клетки. Повышенное активное сопротивление этой клетки обеспечивает двигателю значительный пусковой момент при пониженном пусковом токе. По мере увеличения частоты вращения ротора уменьшается частота тока в роторе, при этом индуктивное сопротивление рабочей клетки уменьшается, и распределение плотности тока в стержнях пусковой и рабочей клеток становится почти одинаковым. В итоге происходит перераспределение вращающего момента между клетками: если в начальный период пуска момент создается главным образом токами пусковой клетки, то по окончании периода пуска вращающий момент создается в основном токами рабочей клетки. Максимальное значение момента пусковой клетки вследствие ее повышенного активного сопротивления смещено в сторону скольжений, близких к единице. Вращающие моменты от обеих клеток направлены в одну сторону, поэтому результирующий момент двигателя равен сумме моментов пусковой Мпк и рабочей Мраб.к клеток М = Мп.к + Мраб.к Двигатели с двумя клетками на роторе по сравнению с асинхронными двигателями обычной конструкции имеют повышенную стоимость, что объясняется сложностью конструкции.
Вопрос47. Пуск асинхронных двигателей с короткозамкнутым ротором. Различные способы пуска, их схемы, достоинства и недостатки. Пуск непосредственным включением в сеть. Этот способ пуска, отличаясь простотой, имеет существенный недостаток: в момент подключения двигателя к сети в обмотке статора возникает большой пусковой ток, в 5—7 раз превышающий номинальный ток двигателя. При небольшой инерционности исполнительного механизма частота вращения двигателя быстро достигает установившегося значения и пусковой ток также быстро спадает, не вызывая перегрева обмотки статора. Но такой значительный бросок тока в питающей сети может вызвать в ней заметное падение напряжения. Однако этот способ пуска благодаря своей простоте получил наибольшее применение для двигателей мощностью до 38—50 кВт и более (при достаточном сечении жил токоподводящего кабеля). При необходимости уменьшения пускового тока двигателя применяют какой-либо из способов пуска короткозамкнутых двигателей при пониженном напряжении.
Пуск при пониженном напряжении. Пусковой ток двигателя пропорционален подведенному напряжению U1, уменьшение которого вызывает соответствующее уменьшение пускового тока. Для асинхронных двигателей, работающих при соединении обмоток статора треугольником, можно применить пуск переключением обмотки статора со звезды на треугольник. В момент подключения двигателя к сети переключатель ставят в положение «звезда», при котором обмотка статора оказывается соединенной в звезду. При этом фазное напряжение на статоре понижается в
Вопрос 49. Регулирование частоты вращения АД. Основные способы, их техническая реализация. Достоинства и недостатки. Частота вращения ротора асинхронного двигателя n2 =n1(1 - s) = (f160/ p)(l - s). Из этого выражения следует, что частоту вращения ротора асинхронного двигателя можно регулировать изменением какой - либо из трех величин: скольжения s, частоты тока в обмотке статора f 1 или числа полюсов в обмотке статора 2р. Регулирование частоты вращения изменением скольжения s возможно тремя способами: изменением подводимого к обмотке статора напряжения, нарушением симметрии этого напряжения и изменением активного сопротивления обмотки ротора. Регулировка частоты вращения изменением скольжения происходит только в нагруженном двигателе. В режиме холостого хода скольжение, а следовательно, и частота вращения остаются практически неизменными. Регулирование частоты вращения изменением частоты тока в статоре. Этот способ регулирования (частотное регулирование) основан на изменении синхронной частоты вращения n1 = f 1 60/ р. Для осуществления этого способа регулирования необходим источник питания двигателя переменным током с регулируемой частотой. В качестве таких источников могут применяться преобразователи частоты (ПЧ). Чтобы регулировать частоту вращения, достаточно изменить частоту тока f 1. Но с изменением частоты f 1 = ω1p/ (2π) будет изменяться и максимальный момент. Поэтому для сохранения неизменным перегрузочной способности, необходимо одновременно с изменением частоты f 1 изменять и напряжение питания U1. Подводимое к двигателю напряжение необходимо изменять пропорционально изменению частоты тока.Частотное регулирование двигателей позволяет плавно изменять частоту вращения в широком диапазоне (до 12:1). Регулирование частоты вращения изменением числа полюсов обмотки статора. Частота вращения ротора асинхронного двигателя обратно пропорциональна количеству пар полюсов. Количество пар полюсов не может быть дробным числом, поэтому регулирование — ступенчатое. Изменение числа пар полюсов можно получить укладкой в пазы статора не одной, а двух обмоток. В зависимости от того, какая обмотка работает, такая и частота вращения. Недостаток такого способа — плохое использование обмоточного провода, по тому что всегда работает только одна обмотка. Также изменение числа пар полюсов можно получить ис пользованием обычной обмотки путем переключения катушечных групп. Многоскоростные двигатели имеют недостатки: Большие габариты и масса.
Вопрос 50. Устройство, принцип действия и пуск однофазного асинхронного двигателя. Фазосдвигающие элементы. Асинхронные конденсаторные двигатели. Устройство, принцип действия, отличие от однофазного. Включение без фазосдвигающего элемента. По своему устройству однофазный асинхронный двигатель аналогичен трехфазному и состоит из статора, в пазах которого уложена однофазная обмотка (см. рис. 8.8), и короткозамкнутого ротора. Особенность работы однофазного асинхронного двигателя заключается в том, что при включении однофазной обмотки статора С1—С2 в сеть МДС статора создает не вращающийся, а пульсирующий магнитный поток с амплитудой Фmах. При этом ось магнитного потока остается неподвижной в пространстве. Когда по обмотке статора протекает однофазный ток и ротор неподвижен, создается пульсирующее магнитное поле. Результирующий вращающий момент при пуске равен нулю и двигатель без специальных пусковых устройств не сможет прийти во вращение. С этой целью на статоре двигателя помимо рабочей обмотки применяют еще одну обмотку — пусковую. Эти обмотки располагают на статоре обычно так, чтобы их оси были смещены относительно друг друга на 90 эл. град. Кроме того, токи в обмотках статорадолжны быть сдвинуты по фазе относительно друг друга. Для этого в цепь пусковой обмотки включают фазо смещающий элемент (ФЭ), в качестве которого могут быть применены активное сопротивление, индуктивность или ем кость. По достижении частотой вращения значения близкого к номинальному, пусковую обмотку Вотключают с по мощью реле. Таким образом, во время пуска двигатель является двухфазным, а во время работы — однофазным. Асинхронный конденсаторный двигатель имеет на статоре две обмотки, занимающие одинаковое число пазов и сдвинутые в пространстве относительно друг друга на 90 эл. град. Одну из обмоток — главную — включают непосредственно в однофазную сеть, а другую — вспомогательную — включают в эту же сеть, но через рабочий конденсатор Сра6. В отличие от рассмотренного ранее однофазного асинхронного двигателя в конденсаторном двигателе вспомогательная обмотка после пуска не отключается и остается включенной в течение всего периода работы, при этом емкость Сраб создает фазовый сдвиг между токами.Таким образом, если однофазный асинхронный двигатель по окончании процесса пуска работает с пульсирующей МДС статора, то конденсаторный двигатель - с вращающейся. Поэтому конденсаторные двигатели по своим свойствам приближаются к трехфазным двигателям. Емкость конденсатора зависит от значения тока, который, в свою очередь, определяется нагрузкой. При изменении нагрузки вращающееся магнитное поле становится эллиптическим. Так как пусковой ток в однофазных двигателях в 3-4 раза больше номинального, то используют так называемую пусковую емкость, которая в 3-4 больше рабочей. По окончании разгона двигателей пусковую емкость отключают.
Вопрос 51. Однофазный двигатель с экранированными полюсами. Устройство, принцип действия, основные характеристики. Для создания пускового момента в асинхронных двигателях малой мощности применяют конструкцию с явно выраженными экранированными полюсами, на которых располагают однофазную обмотку. Полюсыимеют расщепленную на две части конструкцию, при этом на одну из частей каждого полюса надет короткозамкнутый виток (экран) в виде медного кольца. Ротор двигателя короткозамкнутый. При включении обмотки статора в сеть пульсирующий поток наводит в короткозамкнутом витке (экране) ток, препятствующий нарастанию магнитного потока и вызывающий фазовый сдвиг потока в этой части полюса. В результате потоки в обеих частях каждого полюса оказываются сдвинутыми по фазе относительно друг друга, что, в свою очередь, приводит к образованию в двигателе вращающегося магнитного поля. Часто для улучшения пусковых и рабочих характеристик двигателя между полюсами помещают магнитные шунты в виде стальных пластинок, замыкающих края полюсных наконечников полюсов статора. Асинхронные двигатели с экранированными полюсами нереверсивны — ротор всегда вращается в направлении от неэкранированной части полюса к экранированной. Обычно эти двигатели изготовляют мощностью не более 100 Вт и применяют для привода устройств, не требующих большого пускового момента (электропривод вентиляторов, электропроигрывателей и т. п.) Недостатки: большие габариты, небольшой пусковой момент, малый коэффициент мощности, невысокий КПД, отсутствие реверса.
Вопрос 52. Трехфазный АД в режиме однофазного. Схемы включения, расчет и выбор конденсатора. В этом случае трехфазный двигатель используют как конденсаторный, включив его по одной из схем. Величину рабочей емкости Сраб (мкФ) при промышленной частоте (50 Гц) можно ориентировочно определить по одной из эмпирических формул: для схемы рис. а... Сра9 = 2700 11 Ном/U1 ном; для схемы рис. б... Сраб = 2800 I1 Ном/U 1ном; для схемы рис. в... СРаб = 4800 11 Ном/U1 ном; При подборе рабочей емкости необходимо следить за тем, чтобы величина тока в обмотке статора при установившемся режиме работы с требуемой нагрузкой на валу не превышала номинального значения, указанного в паспорте двигателя. Если пуск двигателя осуществляется вхолостую или с небольшой нагрузкой на валу, то пусковая емкость не требуется. Если же двигатель пускается в ход со значительной нагрузкой на валу, то пусковая емкость Спуск необходима. Величину этой емкости принимают Спуск = (2,5 3) Сраб. В этом случае пусковой момент двигателя становится близким к номинальному. При необходимости дальнейшего увеличения пускового момента емкость Спуск следует увеличить до (6ч-8) Сраб. При использовании трехфазного двигателя в однофазном конденсаторном режиме (рис. 23.7) его полезная мощность не превышает 70 — 80% номинальной мощности при его работе от трехфазной сети, а при однофазном режиме с отключением одной фазной обмотки (без ФЭ) полезная мощность двигателя не превышает 60% от мощности в трехфазном режиме.
Вопрос 53. Индукционный регулятор и фазорегулятор. Преобразователь частоты. Назначение, устройство, принцип действия. Индукционный регулятор напряжения (ИР) представляет собой асинхронную машину с фазным ротором, предназначенную для плавного регулирования напряжения. Рассмотрим работу трехфазного ИР, получившего преимущественное применение. Ротор ИР заторможен посредством червячной передачи, которая не только удерживает его в заданном положении, но и позволяет плавно поворачивать его относительно статора. Обмотки статора и ротора в ИР имеют автотрансформаторную связь, поэтому ИР иногда называют поворотным автотрансформатором.Напряжение сети U1подводится к обмотке ротора, при этом ротор создает вращающееся магнитное поле, наводящее в обмотке ротора ЭДС Е1 , а в обмотке статора — ЭДС Е2 .ИР применяются во всех случаях, где необходима плавная регулировка напряжения, например в лабораторных исследованиях. Фазорегулятор (ФР). Предназначен для изменения фазы вторичного напряжения относительно первичного при неизменном вторичном напряжении. В отличие от ИР обмотки ротора и статора ФР электрически не соединены друг с другом, т. е. имеют трансформаторную связь,поэтому ФР иногда называют поворотным трансформатором.Изменение фазы вторичного напряжения осуществляется поворотом ротора относительно статора. Первичной обмоткой в ФР обычно является обмотка статора. Фазорегуляторы применяются в устройствах автоматики (для фазового управления) и измерительной технике (для проверки ваттметров и счетчиков). Асинхронный преобразователь частоты. Как известно, частота тока в роторе асинхронной машины зависит от скольжения (f 2 = s f 1).Это свойстве асинхронных машин используется в асинхронных преобразователях частоты (АПЧ). Обмотку статора АПЧ подключают к трехфазной сети с частотой f 1, а ротор приводят во вращение приводным двигателем (ПД) в направлении против вращения поля статора. В этом случае в обмотке ротора наводится ЭДС Е2 частотой f 2 >f 1, так как скольжение s >1. Указанная ЭДС через контактные кольца и щетки создает на выходе АПЧ напряжение. Если требуется получить на выходе АПЧ напряжение частотой f 2 < f 1, то ротор вращают в направлении вращения поля статора с частотой вращения n2 < n1(при этом s <1). Мощность на выходе АПЧ складывается из электромагнитной мощности Рэм, передаваемой в обмотку ротора вращающимся полем статора, и механической мощности приводного двигателя Рпд, т. е. Р2 = Рэм + Рпд. Соотношение между мощностями Рэм и Рпдзависит oт скольжения. Так, при работе АПЧ со скольжением s = 2эти мощности равны и ротор половину мощности получает от статора, а половину — от приводного двигателя. При необходимости плавной регулировки частоты на выходе АПЧ в качестве приводного двигателя применяют электродвигатель с плавной регулировкой частоты вращения, например двигатель постоянного тока. Однако чаще всего АПЧ используют для получения определенной частоты тока f 2 и в качестве приводного применяют асинхронный или синхронный двигатель.
Вопрос 55. Асинхронные исполнительные двигатели. Конструкция, принцип действия, особенности работы. В системах управления, регулирования и контроля широко применяются управляемые электродвигатели небольшой мощности. С помощью этих двигателей осуществляется преобразование электрического сигнала в механическое перемещение — вращение вала. Такие электродвигатели называют исполнительными (ИД).Характер требований, предъявляемых к исполнительным двигателям, определяется спецификой их работы: частые пуски, реверсы, постоянно изменяющаяся частота вращения. Основные требования - отсутствие самохода, т. е. самоторможение при снятии сигнала управления; широкий диапазон регулирования частоты вращения; линейность характеристик; большой пусковой момент; малая мощность управления; быстродействие (малоинерционность).На статоре асинхронного исполнительного двигателя расположена двухфазная обмотка. Одна из фазных обмоток — обмотка возбуждения (ОВ) - постоянно включена в сеть с напряжением U1, а на другую - обмотку управления (ОУ) — напряжение (сигнал управления) Uc подается лишь при необходимости включения двигателя.Асинхронные исполнительные двигатели выпускаются на небольшие мощности и имеют несколько разновидностей в зависимости от выполнения ротора: с обмотки в виде беличьей клетки, с полым немагнитным ротором и полым ферромагнитным ротором. Ротор с беличьей клеткой имеет обычную конструкцию. Для увеличения сопротивления клетка выполняется из материалов с повышенным удельным сопротивлением (латунь, бронза и др.). Недостатком такого ротора является большой его момент инерции, что снижает быстродействие двигателя. Значительно меньший момент инерции имеет полый ротор, который выполняется в виде тонкостенного стакана, с одной торцевой стороны насаженного на вал. Немагнитный полый ротор изготовляется из алюминиевого сплава. Толщина его стенок 0,2 - 1 мм. Полый ротор, закрепленный на валу, вращается в зазоре между внешним и внутренним статорами. На внешнем статоре располагаются обмотки, а внутренний статор служит для уменьшения магнитного сопротивления в контуре главного магнитного потока. Как внешний, так и внутренний статор собирается из листов электротехнической стали, покрытых лаком. Воздушным зазором в двигателе с полым немагнитным ротором следует считать зазор между внутренним и внешним статорами. Он относительно велик: 0,5-1,5 мм. Вследствие этого такие двигатели имеют увеличенный ток холостого хода; он составляет 0,8-0,9 номинального тока. Это приводит к увеличению габаритов двигателя и снижению его КПД. Иногда полый ротор выполняется ферромагнитным (стальным). В этом случае внутренний статор не требуется, так как магнитный поток замыкается по стенкам ротора (толщина его стенок 0,5-3 мм). Конструктивно двигатели с ферромагнитным ротором получаются проще, чем двигатели с полым немагнитным ротором Вопрос 59. Потери и КПД синхронных машин. Магнитные потери. КПД синхронного генератора. Энергетическая диаграмма. Преобразование механической энергии в электрическую в генераторе и электрической энергии в механическую в двигателе сопровождается некоторыми потерями энергии, которые выделяются в виде тепла, нагревая электрическую машину. Электрические потери ΔРэл появляются в результате того, что каждая обмотка обладает определенным сопротивлением, препятствующим прохождению по ней электрического тока. Они пропорциональны сопротивлению данной обмотки и квадрату протекающего по ней тока, т. е. сильно возрастают с увеличением нагрузки машины. Электрические потери вызывают нагрев проводов обмоток. К электрическим потерям относятся также потери, возникающие при протекании тока через щетки и через переходное сопротивление между щетками и коллектором; они вызывают нагрев коллектора и щеток. Магнитные потери ΔРМ (потери в стали) возникают в сердечниках якоря и полюсов в результате перемагничивания стали этих сердечников и образования в них вихревых токов. Перемагничивание стали сердечника якоря происходит потому, что при вращении якоря каждая его точка попеременно проходит то под северным, то под южным полюсам. Перемагничивание стали полюсных наконечников вызывается в результате изменения магнитной индукции в воздушном зазоре машины в пределах ±ΔВ при вращении зубчатого якоря. Магнитные потери вызывают нагрев сердечника якоря и полюсов, они почти не зависят от нагрузки машины, но резко возрастают с увеличением частоты перемагничивания, т. е. частоты вращения якоря. Механические потери ΔPМХ возникают в результате трения: в подшипниках, щеток по коллектору, деталей машины о воздух в процессе вентиляции. Эти потери вызывают нагрев подшипников, коллектора и щеток, с увеличением нагрузки они возрастают незначительно. При повышении частоты вращения якоря электрической машины механические потери резко возрастают. Добавочные потери ΔPдоб обусловливаются различными вторичными явлениями, имеющими место при работе электрических машин под нагрузкой: возникновением вихревых токов в проводниках обмотки якоря, неравномерным распределением тока по сечению проводников и индукции в воздушном зазоре машины, воздействием коммутационных токов (в машинах постоянного тока) и переменных потоков рассеяния (в машинах переменного тока), которые индуцируют вихревые токи в крепежных деталях, и др. КПД синхронной машины зависит от величины нагрузки (β = Р2/ Рном) и от ее характера (соs φ1). h = Р2 / Р2 + ΔP
|
|||||||||
|
|
Последнее изменение этой страницы: 2016-08-26; просмотров: 1442; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.188.175.182 (0.034 с.) |
 .
.
 раз. Во столько же раз уменьшается и ток в фазных обмотках двигателя. Кроме того, при соединении обмоток звездой линейный ток равен фазному, в то время как при соединении этих же обмоток треугольником линейный ток больше фазного в
раз. Во столько же раз уменьшается и ток в фазных обмотках двигателя. Кроме того, при соединении обмоток звездой линейный ток равен фазному, в то время как при соединении этих же обмоток треугольником линейный ток больше фазного в  раз. Следовательно, переключив обмотки статора звездой, мы добиваемся уменьшения линейного тока. После того как ротор двигателя разгонится до частоты вращения, близкой к установившейся, переключатель быстро переводят в положение «треугольник» и фазные обмотки двигателя оказываются под номинальным напряжением. Недостаток - уменьшение фазного напряжения в
раз. Следовательно, переключив обмотки статора звездой, мы добиваемся уменьшения линейного тока. После того как ротор двигателя разгонится до частоты вращения, близкой к установившейся, переключатель быстро переводят в положение «треугольник» и фазные обмотки двигателя оказываются под номинальным напряжением. Недостаток - уменьшение фазного напряжения в 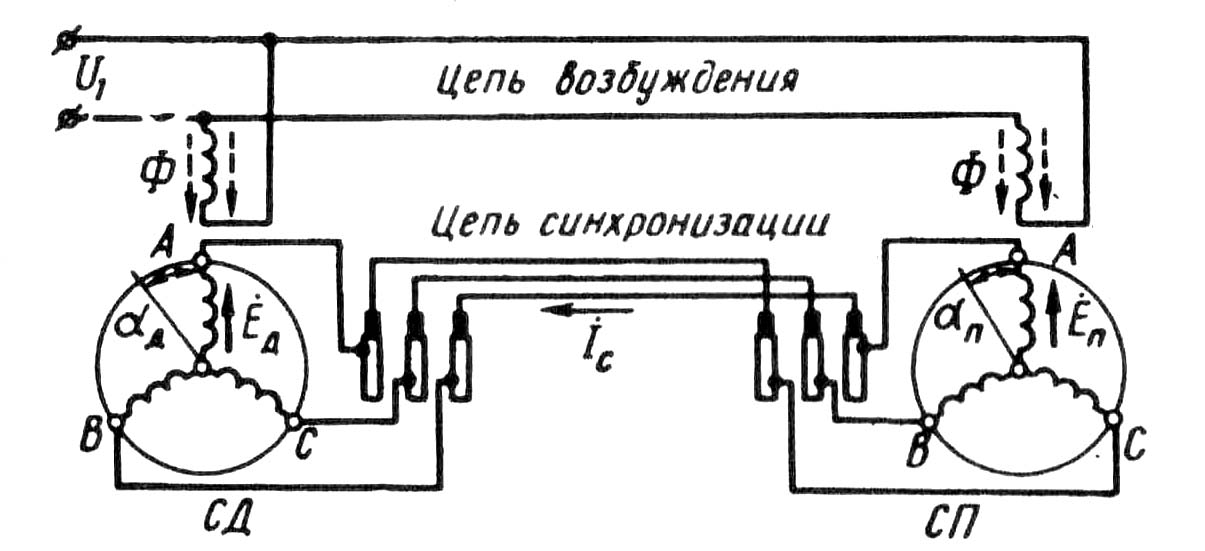 Вопрос 54. Сельсины. Назначение, виды, устройство и принцип действия. Схема включения сельсинов в индикаторном режиме. Сельсинами называются электрические микромашины переменного тока, обладающие свойством самосинхронизации. Сельсин имеет однофазную обмотку возбуждения и трехфазную обмотку синхронизации, соединенную звездой. Одна из обмоток располагается на роторе, а другая — на статоре. На обмотки возбуждения сельсинов подано напряжение U1. Ток, проходящий по ним, создает магнитный поток. В свою очередь магнитный поток наводит в обмотках синхронизации ЭДС: Ед – в сельсине-датчике (СД) и Еп в сельсине-приемнике (СП). Если ротор СД занимает такое же положение как и ротор СП, их ЭДС равны, и тока в цепи синхронизации нет. Если ротор СД повернуть на угол а, то одноименные фазы обмоток синхронизации сельсинов окажутся не в одинаковых условиях по отношению к магнитному потоку и их ЭДС не будут одинаковы. В результате возникнет ток синхронизации, вызванный разность ЭДС сельсинов. Он, взаимодействуя с магнитным полем, создаст вращающие моменты на роторе СД, направленные встречно повороту, а на роторе СП – в сторону поворота. Поэтому поворот ротора СД будет сопровождаться синхронным поворотом ротора СП.
Вопрос 54. Сельсины. Назначение, виды, устройство и принцип действия. Схема включения сельсинов в индикаторном режиме. Сельсинами называются электрические микромашины переменного тока, обладающие свойством самосинхронизации. Сельсин имеет однофазную обмотку возбуждения и трехфазную обмотку синхронизации, соединенную звездой. Одна из обмоток располагается на роторе, а другая — на статоре. На обмотки возбуждения сельсинов подано напряжение U1. Ток, проходящий по ним, создает магнитный поток. В свою очередь магнитный поток наводит в обмотках синхронизации ЭДС: Ед – в сельсине-датчике (СД) и Еп в сельсине-приемнике (СП). Если ротор СД занимает такое же положение как и ротор СП, их ЭДС равны, и тока в цепи синхронизации нет. Если ротор СД повернуть на угол а, то одноименные фазы обмоток синхронизации сельсинов окажутся не в одинаковых условиях по отношению к магнитному потоку и их ЭДС не будут одинаковы. В результате возникнет ток синхронизации, вызванный разность ЭДС сельсинов. Он, взаимодействуя с магнитным полем, создаст вращающие моменты на роторе СД, направленные встречно повороту, а на роторе СП – в сторону поворота. Поэтому поворот ротора СД будет сопровождаться синхронным поворотом ротора СП.


