Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Программируемые логические контроллерыСтр 1 из 7Следующая ⇒
ВВЕДЕНИЕ
Системы автоматического управления (САУ) современным оборудованием должны быть надежны, просты в эксплуатации и способны выполнять широкий спектр технологических задач. Сегодня релейные схемы автоматического управления уже не справляются с поставленными задачами из-за своей громоздкости, низкого быстродействия и частых отказов. Выход из строя оборудования систем управления ведет к вынужденным простоям, связанным с их ремонтом, что в свою очередь приводит к существенным экономическим затратам. Существует альтернатива релейным схемам – логические электронные устройства на интегральных микросхемах, в которых частично устранены указанные недостатки. Однако развитие САУ на интегральных микросхемах практически достигло своего предела по нескольким причинам. Во-первых, такие системы достаточно «жесткие», т.е. невозможно (или очень сложно) изменить САУ при изменении технологического процесса, например, при замене оборудования на более совершенное, или при установке дополнительного оборудования. Проще разработать и изготовить новую электронную схему, чем модернизировать старую. Во-вторых, сложность, надежность и стоимость электронной схемы зависят от сложности управления технологическим процессом. Для разработчика существует соблазн упростить САУ, но при этом может пострадать качество управления. В-третьих, разработка САУ на интегральных микросхемах не является унифицированной, каждая отдельная САУ разрабатывается сама по себе. Две различные САУ, предназначенные для управления одинаковыми (или схожими) технологическими процессами, но созданные разными разработчиками, будут существенно отличаться друг от друга. Таким образом, анализ САУ с целью изучения ее работы (например, для ремонта или модернизации) будет являться весьма трудоемким, если он проводится не разработчиком. В-четвертых, разработка, создание и обслуживание САУ требует высокой квалификации. В-пятых, несмотря на то, что возможности современных логических электронных устройств высоки, они все-таки ограничены. ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ Общие сведения
Программируемый логический контроллер (ПЛК) – это микропроцессорная система, предназначенная для реализации алгоритмов логического управления. Он предназначен для замены релейно-контактных схем, собранных на дискретных компонентах – реле, счетчиках, таймерах, элементах жесткой логики, а также схем на интегральных микросхемах. Основное (но не единственное) достоинство контроллеров заключается в том, что все его функции реализованы программно. На одном контроллере можно без труда реализовать схему, эквивалентную огромному числу элементов жесткой логики. При этом надежность схемы совершенно не зависит от ее сложности. Различные контроллеры могут программироваться по-разному:
- мнемоническими схемами (функциональными блоками); это наиболее простой способ программирования; - специализированным языком высокого уровня; - на языке ассемблера или машинным кодом (наиболее сложный способ). Современные контроллеры могут обрабатывать дискретные и аналоговые сигналы, управлять клапанами, шаговыми двигателями, сервоприводами, преобразователями частоты, осуществлять регулирование (имеются встроенные регуляторы). Высокие эксплуатационные характеристики делают целесообразным применение контроллеров везде, где требуется логическая обработка сигналов от датчиков. Применение контроллера обеспечивает: - высокую надежность; - простое тиражирование и обслуживание устройств управления; - ускоряет монтаж и наладку оборудования; - обеспечивает быстрое обновление алгоритмов управления (в том числе и на работающем оборудовании). Кроме прямых выгод от применения контроллеров, обусловленных низкой ценой и высокой надежностью, есть и косвенные. Появляется возможность реализовать дополнительные функции, не усложняя и не увеличивая стоимость готовой продукции, которые помогут полнее реализовать возможности оборудования. Быстрое развитие микроэлектроники позволяет ожидать дальнейшего снижения цен и улучшения характеристик контроллеров, что является дополнительным стимулом к их применению. Большой ассортимент контроллеров позволяет найти оптимальное решение как для несложных задач, так и для комплексной автоматизации производства.
Аналоговые выходные сигналы формируются в цифро-аналоговых преобразователях (ЦАП), которые преобразуют двоичный цифровой код в аналоговый сигнал. Следует отметить, что АЦП и ЦАП могут и не находится непосредственно внутри контроллеров, а подключаться как дополнительные модули. АЦП и ЦАП рассматриваются в главе 3. Шина контроллера связывает все его компоненты. Контроллеры содержат три основные шины. Шина данных используется для передачи данных между процессором и другими элементами. Адресная шина используется для передачи адреса в памяти (или порта ввода-вывода), по которому данные можно прочитать или сохранить. Шина управления используется для передачи сигналов управления из процессора другим элементам. Физически шины представляют собой группу проводящих дорожек на плате или проводов, по которым посылаются цифровые сигналы. Передача данных по шинам называется параллельной передачей. При последовательной передаче данных каждый бит по очереди передается по одному-единственному проводу. А при параллельной передаче данных, например при передаче двоичного числа 01101001 по шине передаются все восемь разрядов одновременно, и каждый разряд по своему отдельному проводу (рис. 1.3).
Рис. 1.3. Параллельная (а) и последовательная (б) передачи данных Интерфейс предназначен для связи контроллера с компьютером или другими элементами автоматизированной системы. Под интерфейсом понимают унифицированное аппаратно-программное устройство для передачи информации. То есть два разных устройства, обладающих одним интерфейсом, можно подключить друг к другу для обмена информацией. Унификация интерфейсов обеспечивает совместимость подключаемых устройств. Контроллеры могут обладать различными интерфейсами. Обычно контроллеры подключаются через интерфейс к ПЭВМ (рис. 1.1) для программирования и/или мониторинга работы, но могут подключаться также и к другим устройствам и даже к компьютерным сетям. Очевидно, что ПЭВМ, к которой производится подключение, должна обладать соответствующим интерфейсом. Основные типы интерфейсов рассмотрены в главе 4. НА БАЗЕ КОНТРОЛЛЕРОВ Контроллеры не применяются сами по себе, без дополнительного оборудования. В общем случае, схемы использования контроллеров можно подразделить на несколько: 1. Системы сбора данных (рис. 2.1). В этом случае контроллер применяется в качестве «приемника» данных, т.е. он принимает сигналы; осуществляет их аналого-цифровое преобразование; обрабатывает данные; выводит информацию на собственный дисплей (КДМ), или на ПЭВМ, или на другое устройство регистрации данных.
Рис. 2.1. Варианты систем сбора данных ПЭВМ может как присутствовать, так и нет. ПЭВМ может подключаться к контроллеру как через стандартный интерфейс, так и удаленным соединением через аналоговый канал. В этом случае подключение ПЭВМ и контроллера осуществляется посредством модемов, а в качестве линии связи может быть коммутируемая или выделенная телефонные линии, а также сотовая связь (GSM). 2. Системы программного управления (рис. 2.2) предназначены для выдачи управляющих воздействий на исполнительные механизмы по заранее заданной программе. В некоторых случаях возможно подключение ПЭВМ к контроллеру, тогда оператор имеет возможность вмешиваться в процесс управления.
Рис. 2.2. Системы программного управления В качестве исполнительных органов могут использоваться различные устройства для воздействия на технологический процесс, а также устройства сигнализации: магнитные пускатели, электромагниты, винтили, сигнальные лампы, звонки и т.д. Следует отметить, что системы сбора данных и системы программного управления являются, с точки зрения теории автоматического управления, разомкнутыми системами. В таких системах возможности программируемых контроллеров, как регуляторов, не используются в полной мере 3. Автоматизированные системы управления технологическими процессами (АСУТП) являются полноценными замкнутыми системами управления. Они могут быть построены по различным схемам (рис. 2.3), но все работают по одному принципу: контроллер (несколько контроллеров) получают информацию с датчиков, обрабатывают ее, выдают сигналы на исполнительные органы. В АСУТП может быть реализована функция системы контроля и диспетчеризации (SCADA), дающая возможность в удобной форме (на экране ПЭВМ) управлять технологическим процессом, просматривать текущие параметры процесса, вести регистрацию данных.
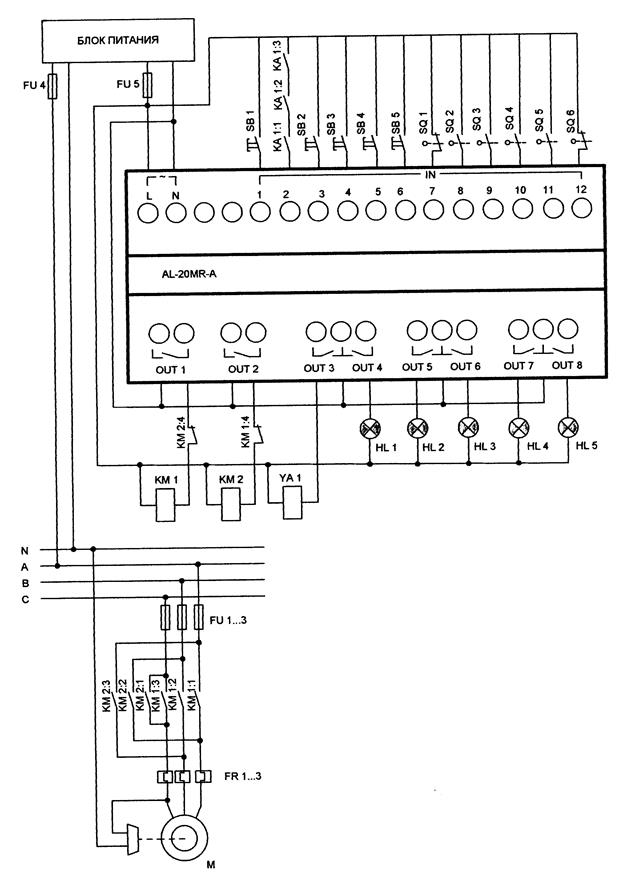
Рис. 2.3. Варианты АСУТП На предприятиях, где применяются сложные производственные процессы, например, на целлюлозно-бумажных производствах, внедряются АСУТП на базе готовых систем автоматизации (например Damatic или Experion PKS), которые содержат готовые унифицированные аппаратно-программные решения. Общая структура таких АСУТП приведена на рис. 2.3 (в). В качестве примера на рис. 2.4 приведена схема системы управления автоматом облагораживания внешнего вида мебельных заготовок на базе контроллера «Alpha XL», а на рис. 2.5 - схема системы автоматического управления фрезерно-брусующим станком на базе контроллера AL-20MR-A.
Рис. 2.4. Схема системы управления автоматом облагораживания внешнего вида мебельных заготовок
Рис. 2.5. система автоматического управления фрезерно-брусующим станком
EXPERION PKS
Рис. 3.3. Модули ввода-вывода аналоговых и цифровых сигналов
Цифровые карты обладают всеми необходимыми функциями сопряжения, минимизируя необходимость в предохранителях, ограничителях и в других внешних устройствах. Входные-выходные сигналы приняты стандартными для обеспечения совместимости с большинством приборов.
Обеспечение точности автоматизированной системы основывается на точности аналоговых интерфейсов. Токовые аналоговые сигналы могут достигать 20 мА и на входе и на выходе. Также, и на входе и на выходе применяются аналого-цифровое и цифро-аналоговое преобразования с высоким разрешением (не менее 12 бит). 3.2.2. Плата вывода цифровых сигналов (BOU, Binary output). Имеет 16 транзисторных выходов, способных управлять продолжительным током до 1 А или 5 А, если ток длиться не более 1 с. Выходные каналы могут работать как управляемые переключатели, а также как управляемые силовые выходы. Каналы также могут работать параллельно, если необходимо управлять большими токами.
Таблица 3.1. Спецификация интерфейсной карты BOU/24 V
3.2.3. Плата ввода цифровых сигналов (SWI, Switch input). Имеет 16 каналов для чтения двоичной информации с механических контактов и с 2-х или 3-хпроводных датчиков. Плата не требует внешнего питания и работает от напряжения, которое обеспечивают подключенные к ней устройства; вследствие этого почти не потребляет энергии и не выделяет тепла.
Таблица 3.2. Спецификация интерфейсной карты SWI/24 V
3.2.4. Плата вывода аналоговых сигналов (ACO, Analog current output). Имеет 10 каналов, каждый из которых может выводить сигнал до 24 В. Выходные сигналы линеаризуются. Доковый сигнал может изменяться в диапазоне 0…20 мА или 4…20 мА.
Таблица 3.3. Спецификация интерфейсной карты ACO
3.2.5. Плата ввода аналоговых сигналов (MAI, Multichannel analog input). Плата обеспечивает линеаризованное и устойчивое чтение до 10 аналоговых сигналов. Плата может считывать сигналы по току или по напряжению.
Таблица 3.4. Спецификация интерфейсной карты MAI
АНАЛОГО-ЦИФРОВОЕ И ЦИФРО-АНАЛОГОВОЕ ПРЕОБРАЗОВАНИЯ Основные понятия Сигнал, величина которого зависит от времени, называется динамическим сигналом. Динамический сигнал можно описать как функцию времени. Если функция определена для всех точек на временной оси (на определенном конечном интервале времени), то считается, что это непрерывный во времени сигнал. Если сигнал, а значит и функция, могут принимать любое значение в пределах некоторого интервала значений, то такой сигнал называют сигналом с непрерывным множеством значений. Почти все сигналы, возникающие в макроскопических физических процессах, являются одновременно и непрерывными во времени и имеющими непрерывное множество значений. Такие непрерывные сигналы, изменяющиеся по мере того, как происходят изменения в физических процессах, называют аналоговыми сигналами. Существуют также дискретные во времени сигналы. Значение такого сигнала известно только в определенные дискретные моменты времени и им можно воспользоваться только в эти моменты времени. Дискретный во времени сигнал можно рассматривать как результат взятия выборок непрерывного во времени сигнала. Точно так же и величина сигнала может принимать только некоторые дискретные значения. Тогда сигнал называют дискретным по величине сигналом. Такой сигнал может принимать только конечное число значений между заданным верхним и нижним пределами. Процесс преобразования сигнала с непрерывным множеством значений в сигнал с дискретными значениями называется квантованием и реализуется с помощью аналого-цифрового преобразователя. Некоторые из таких преобразователей действуют мгновенно. Тогда непрерывность во времени сохраняется даже для сигналов с дискретными значениями. Однако большинство аналого-цифровых преобразователей действуют не мгновенно, поскольку процедура преобразования требует некоторого времени. Следующее преобразование в последовательности преобразований возможно только тогда, когда выполнено предыдущее. В таких преобразователях должно производится взятие выборки сигнала, поэтому свойство непрерывности во времени теряется. Сигналы, дискретные и по величине и по времени называют
Рис. 4.1. Виды сигналов цифровыми сигналами. Цифровые сигналы представляются, как правило, в двоичной форме. Десятичное число N в двоичной форме представляется так:
аi – коэффициенты (разряды), принимающие значения 0 или 1; m и n – целые числа, определяющие разрядность (число разрядов) целой и дробной частей соответственно. Обычно число N в двоичной форме записывают проще:
Например, число 45,125 в двоичной форме записывается:
Или
Предпочтение, отдаваемое двоичной системе, является следствием того факта, что многие постоянные электронные, гидравлические и другие системы имеют два устойчивых состояния, как у выключателя (замкнуто или разомкнуто), реле, триггера. Поэтому в микропроцессорных системах также применяют двоичную систему счисления. Для того, чтобы контроллеры могли работать с аналоговыми величинами, эти величины необходимо преобразовать в поток битов с помощью аналого-цифровых преобразователей. 4.2. Аналого-цифровое преобразование Под аналого-цифровым преобразованием понимают процесс преобразования аналогового сигнала в цифровой, выполняемый специальным устройством – аналого-цифровым преобразователем (АЦП) (рис. 4.2). Аналого-цифровое преобразование называют также оцифровыванием или оцифровкой.
Рис. 4.2. Аналого-цифровой преобразователь Преобразование осуществляется тремя процедурами: дискретизацией по времени, квантованием по уровню и кодированием. Термин квантование используется для обозначения преобразования непрерывного аналогового сигнала в ступенчатый дискретный выходной сигнал. Каждая ступенька или уровень напряжения такого выходного сигнала называется уровнем квантования. Интервал квантования – это разность уровней напряжения между двумя соседними ступеньками. Так как квантованный сигнал может меняться только ступенчато, то возрастает погрешность преобразования, называемая погрешностью квантования, которая изменяется в диапазоне плюс-минус половина интервала квантования Q, т.е. ±0,5Q. Погрешность квантования может быть уменьшена при использовании преобразователя, работающего с большим количеством разрядов.
Рис. 4.3. Аналого-цифровое преобразование Время преобразования – время, которое необходимо преобразователю, для создания на выходе цифрового сигнала после того, как на его вход поступил аналоговый сигнал. Аналого-цифровое преобразование (оцифровка) всегда происходит с некоторой ошибкой (рис. 4.3). Ошибка тем меньше, чем больше уровней квантования (т.е. чем больше разрядность АЦП) и чем меньше время преобразования (т.е. чем больше частота оцифровки). Разрядность АЦП как правило фиксирована и ее изменить нельзя. Частоту оцифровки менять можно, при ее повышении увеличивается качество оцифровки. Однако при большом значении частоты сильно увеличивается поток данных от АЦП, который необходимо как-то обрабатывать. При малой частоте оцифровки поток данных небольшой, но оцифрованные данные имеют большую погрешность. Существует компромисс между частотой оцифровки и ее качеством, описываемый теоремой Котельникова: чтобы дискретизация по времени цифрового сигнала происходила без потерь информации, необходимо, чтобы частота дискретизации была по крайней мере в 2 раза больше самой большой частоты в спектре сигнала (гармоники). Пример: необходимо оцифровать звук для записи его на цифровой носитель. Какую частоты оцифровки выбрать? Известно, что верхний предел восприятия звука человеческим ухом составляет не более 22 кГц. Следовательно, чтобы оцифровать звук с наилучшим качеством, необходимо принять частоту оцифровки не менее 44 кГц. Если взять частоту оцифровки меньше, то качество оцифрованного звука будет хуже. Но если взять частоту оцифровки больше 44 кГц, то качество оцифрованного звука уже не возрастет. Интерфейсы компьютера Дополнительные устройства к IBM-совместимому компьютеру могут подключаться через следующие интерфейсы: Таблица 5.1. Интерфейсы компьютера
Примечание: термин «шина» означает, что интерфейс допускает подключение и работу одновременно нескольких устройств, «порт» допускает работу только одного устройства. В таблице 5.1 приведены только основные стандартные, наиболее распространенные интерфейсы. Выбор интерфейса для подключения нестандартного устройства выполняется по двум критериям: сложность конструкции устройства и сложность программирования. Шины расширения (ISA и PCI) позволяют подключать устройства напрямую к системной плате. При этом устройство может претендовать на часть ресурсов компьютера (память, порты ввода-вывода, линии прерывания IRQ и каналы прямого доступа к памяти DMA). Такие устройства работают наиболее эффективно, используют все возможности компьютера. Однако, создание нестандартных устройств для шин расширения достаточно трудоемко главным образом из-за сложности спецификаций на эти шины. Для подключения устройств необходимо выключать компьютер и вскрывать корпус, кроме того, устройство должно находится внутри корпуса (не может быть на расстоянии). Шины периферийных устройств позволяют подключать устройства на расстоянии с помощью кабеля, однако также имеют сложные спецификации. Кроме того, подключаемые устройства сложно программировать. Устройства, подключаемые к COM-порту (он же RS-232C) несложны и относительно легко программируются. По этим причинам многие нестандартные устройства подключаются через RS-232C. Недостаток COM-порта – низкая скорость передачи данных. LPT-порт (он же параллельный порт) разработан для подключения принтеров. Он обеспечивает крайнюю простоту подключаемых устройств и очень легкое их программирование. Недостаток LPT-порта – большой разъем, короткая длина кабеля (до 3 м) и большое количество проводников в кабеле. Если необходимо управлять каким-либо несложным устройством с помощью компьютера, то наибольшую легкость подключения и простоту программирования обеспечивает LPT-порт.
Параллельный порт LPT
5.2.1. Общие сведения Аппаратные средства «классического» стандартного LPT-порта позволяют программным способом реализовать протокол передачи данных Centronics (здесь не рассматривается). Адаптер параллельного интерфейса представляет собой набор регистров, расположенных в пространстве ввода-вывода. Регистры порта адресуются относительно базового адреса порта, стандартными значениями которого являются ЗВСЬ, 378h и 278h (в 16-ричной системе счисления). С внешней стороны порт имеет 8-битную шину данных, 5-битную шину сигналов состояния и 4-битную шину управляющих сигналов. В LPT-порте используются логические уровни ТТЛ, что ограничивает допустимую длину кабеля из-за невысокой помехозащищенности ТТЛ-интерфейса. Гальваническая развязка отсутствует — схемная земля подключаемого устройства соединяется со схемной землей компьютера. Стандартный порт ориентирован на вывод данных, хотя с некоторыми ограничениями позволяет вводить данные. Существуют различные модификации LPT-порта — двунаправленный; ЕРР, ЕСР и др., расширяющие его функциональные возможности, повышающие производительность и снижающие нагрузку на процессор. К LPT-портам подключают принтеры, плоттеры, сканеры, коммуникационные устройства и устройства хранения данных, а также нестандартные устройства. Устройства, подключаемые к LPT-порту могут иметь три вида разъемов (рис. 5.1).
Рис. 5.1. Разъемы параллельного порта
5.2.2. Стандартный параллельный порт Традиционный, он же стандартный, LPT-порт называется SPP (Standard Parallel Port) и является однонаправленным портом. Однако на современных компьютерах он усовершенствован и является двунаправленным, т.е. через него можно как вводить данные, так и выводить.
Таблица 5.2. Разъем стандартного LPT-порта
Примечания: 1. Уровни сигналов порта соответствуют уровням сигналов ТТЛ-логики, а именно: лог.0 = 0,2 В, лог.1 = 5 В; 2. Напряжением считается разность потенциалов между контактом разъема и корпусом разъема (GND); 3. Некоторые сигналы порта инвертированные (таблица 5.2). Это означает, что при установке соответствующего разряда в лог.0 на выходе появится уровень 5 В (а не 0,2 В) и наоборот; 4. Вход Ack (SR6) соединен резистором 10 кОм с питанием +5 В. Порт SPP содержит три 8-битных регистра (порта ввода-вывода), расположенных по соседним адресам в пространстве ввода-вывода, начиная с базового адреса порта BASE (рис. 5.2). На большинстве компьютеров базовый адрес BASE = 378h, но может быть также 3BCh или 278h.
Рис. 5.2. Упрощенное устройство параллельного порта
Регистр данных (Data Register, DR) расположен по базовому (BASE) адресу. Данные, записанные в этот регистр, выводятся на выходные линии интерфейса, т.е. на разъем (рис. 5.2). Регистр состояния (Status Register, SR) представляет собой 5-битный порт ввода сигналов (биты SR4-SR7), адрес BASE+1. Бит SR7 инверсный. Регистр также содержит бит SR2 для служебных надобностей порта, однако на разъем он не выведен. Биты SR0 и SR1 не используются. Регистр управления (Control Register, CR) расположен по адресу BASE+2. Этот 4-битный порт допускает и запись и чтение. Биты CR0, CR1, CR3 инверсные. Биты CR4 и CR5 используются портом для служебных целей, на разъем они не выведены. Биты CR6 и CR7 не используются. Особо необходимо отметить роль служебного бита CR5. На усовершенствованных портах SPP он играет роль переключателя направления передачи регистра данных – на ввод или на вывод. Запись 1 в этот бит переключает регистр данных в состояние ввода, запись 0 – в состояние вывода. При чтении бита CR5 его состояние не определено. 5.2.3. Режимы EPP и ECP Стандартный параллельный порт SPP имеет существенный недостаток – недостаточную скорость передачи данных для современных моделей лазерных принтеров и сканеров. В двунаправленном режиме скорость составляет не более 150 Кбайт/с при полной загрузке процессора. Поэтому позднее были разработаны усовершенствованные режимы параллельного порта – EPP (Enchanced Parallel Port, улучшенный параллельный порт) и ECP (Extended Capability Port, порт с расширенными возможностями), позволяющие существенно увеличить пропускную способность порта, а также разгрузить процессор компьютера от рутинных операций ввода-вывода. Однако чтобы использовать возможности режимов EPP и ECP необходимо, чтобы данные режимы поддерживал как порт компьютера, так и устройство, подключаемое к порту. На практике данные режимы необходимы только принтерам и сканерам, так как им приходится передавать очень большие объемы графической информации. Для нестандартных устройств, подключаемых к параллельному порту эти режимы не нужны, поэтому они здесь подробно не рассматриваются. Режимы EPP и ECP дополняют порт несколькими новыми регистрами, но не заменяют исходные регистры SPP (регистры данных, состояния, управления). Поэтому режимы EPP и ECP полностью совместимы с режимом SPP. На современных компьютерах порт может быть переключен в любой из режимов в базовых настройках компьютера (BIOS Setup).
КОНТРОЛЛЕРЫ СЕРИИ ALPHA ВВЕДЕНИЕ
Системы автоматического управления (САУ) современным оборудованием должны быть надежны, просты в эксплуатации и способны выполнять широкий спектр технологических задач. Сегодня релейные схемы автоматического управления уже не справляются с поставленными задачами из-за своей громоздкости, низкого быстродействия и частых отказов. Выход из строя оборудования систем управления ведет к вынужденным простоям, связанным с их ремонтом, что в свою очередь приводит к существенным экономическим затратам. Существует альтернатива релейным схемам – логические электронные устройства на интегральных микросхемах, в которых частично устранены указанные недостатки. Однако развитие САУ на интегральных микросхемах практически достигло своего предела по нескольким причинам. Во-первых, такие системы достаточно «жесткие», т.е. невозможно (или очень сложно) изменить САУ при изменении технологического процесса, например, при замене оборудования на более совершенное, или при установке дополнительного оборудования. Проще разработать и изготовить новую электронную схему, чем модернизировать старую. Во-вторых, сложность, надежность и стоимость электронной схемы зависят от сложности управления технологическим процессом. Для разработчика существует соблазн упростить САУ, но при этом может пострадать качество управления. В-третьих, разработка САУ на интегральных микросхемах не является унифицированной, каждая отдельная САУ разрабатывается сама по себе. Две различные САУ, предназначенные для управления одинаковыми (или схожими) технологическими процессами, но созданные разными разработчиками, будут существенно отличаться друг от друга. Таким образом, анализ САУ с целью изучения ее работы (например, для ремонта или модернизации) будет являться весьма трудоемким, если он проводится не разработчиком. В-четвертых, разработка, создание и обслуживание САУ требует высокой квалификации. В-пятых, несмотря на то, что возможности современных логических электронных устройств высоки, они все-таки ограничены. ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ Общие сведения
Программируемый логический контроллер (ПЛК) – это микропроцессорная система, предназначенная для реализации алгоритмов логического управления. Он предназначен для замены релейно-контактных схем, собранных на дискретных компонентах – реле, счетчиках, таймерах, элементах жесткой логики, а также схем на интегральных микросхемах. Основное (но не единственное) достоинство контроллеров заключается в том, что все его функции реализованы программно. На одном контроллере можно без труда реализовать схему, эквивалентную огромному числу элементов жесткой логики. При этом надежность схемы совершенно не зависит от ее сложности. Различные контроллеры могут программироваться по-разному: - мнемоническими схемами (функциональными блоками); это наиболее простой способ программирования; - специализированным языком высокого уровня; - на языке ассемблера или машинным кодом (наиболее сложный способ). Современные контроллеры могут обрабатывать дискретные и аналоговые сигналы, управлять клапанами, шаговыми двигателями, сервоприводами, преобразователями частоты, осуществлять регулирование (имеются встроенные регуляторы). Высокие эксплуатационные характеристики делают целесообразным применение контроллеров везде, где требуется логическая обработка сигналов от датчиков. Применение контроллера обеспечивает: - высокую надежность; - простое тиражирование и обслуживание устройств управления; - ускоряет монтаж и наладку оборудования; - обеспечивает быстрое обновление алгоритмов управления (в том числе и на работающем оборудовании). Кроме прямых выгод от применения контроллеров, обусловленных низкой ценой и высокой надежностью, есть и косвенные. Появляется возможность реализовать дополнительные функции, не усложняя и не увеличивая стоимость готовой продукции, которые помогут полнее реализовать возможности оборудования. Быстрое развитие микроэлектроники позволяет ожидать дальнейшего снижения цен и улучшения характеристик контроллеров, что является дополнительным стимулом к их применению. Большой ассортимент контроллеров позволяет найти оптимальное решение как для несложных задач, так и для комплексной автоматизации производства.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-08-16; просмотров: 2051; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.144.254.231 (0.106 с.) |



 , где (4.1)
, где (4.1) (4.2)
(4.2)