Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Исполнительные механизмы постоянной скорости, основные параметры и характеристики, конструктивные исполненияСодержание книги
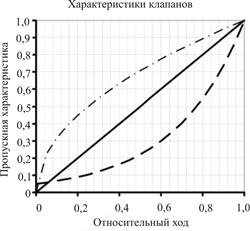
Поиск на нашем сайте К ИМ постоянной скорости относят ИМ, работающие пре- имущественно в трех установившихся режимах в отношении ско- рости вращения (направления перемещения) РО ИМ: на номи- нальной, отрицательной номинальной, нулевой скорости. Время пребывания на той или иной скорости в системах автоматического управления определяется структурой и параметрами устройства управления и решается на стадии синтеза СУИМ. Преимущест- венно реализуют релейно-импульсное управление с широтно- импульсной модуляцией, где такт управления и минимальную скважность непосредственно связывают с производительностью технологической установки и ограничениями, накладываемыми на координаты ИМ. ИМ постоянной скорости могут работать также на простей- шие технологические установки, не требующие реверсирования скорости (сверлильные, точильные, строгательные станки и др.). Однако в энергетике преимущественно требуется реверсирование скорости ИМ ЗРА для обеспечения регулирования или стабилиза- ции таких технологических параметров, как температура, расход, давление, уровень и т.п. ЗРА характеризуется множеством параметров, в частности конструкцией, типом привода, условным диаметром прохода Ду (от 20 мм до 3 м) и др. При этом собственно регулирующий орган, осуществляющий непосредственный контакт и взаимодействие с технологической средой (веществом, материалом или теплоноси- телем), призван изменять количественные или качественные харак- теристики вещества или материала. Основные параметры и харак- теристики типовых регулирующих проходных клапанов, выпускае- мых отечественными предприятиями, представлены в табл. 1.1. Наиболее распространенные пропускные характеристики ре- гулирующих клапанов приведены на рис. 1.2. Важными понятиями в отношении ИМ ЗРА являются следую- щие: рабочая среда, перестановочное усилие и выходной элемент. Таблица 1.1 Пропускные характеристики регулирующих клапанов
Рис. 1.2. Пропускные характеристики регулирующих клапанов: линейная; равнопроцентная; квадратичная Рабочая среда ИМ – внешняя среда, создающая условия для управления движением исполнительного механизма (электриче- ская энергия, энергия давления воздуха или жидкости). Перестановочное усилие – усилие, создаваемое рабочей сре- дой ИМ и передаваемое выходным элементом исполнительного механизма регулирующему органу. Выходной элемент – элемент исполнительного механизма, передающий перестановочное усилие или вращающий момент ре- гулирующему органу (кулачок, рычаг, фланец, шток и т.п.). Различают следующие типы ИМ постоянной скорости. Электрический ИМ (ЭИМ) – исполнительный механизм, ис- пользующий электрическую энергию для управления РО. В конст- рукцию электрического исполнительного механизма в общем слу- чае входят: электродвигатель, редуктор, ручной привод, указатель положения или скорости перемещения выходного элемента, ко- нечные выключатели и датчики обратной связи. Электрические ИМ – наиболее распространенные ИМ в про- мышленной автоматике; обычно они имеют привод от асинхрон- ного короткозамкнутого или синхронного двигателя (АД, СД), бесколлекторного или коллекторного двигателя постоянного тока (БДПТ, ДПТ), шагового двигателя (ШД). Иногда ЭИМ имеют при- вод от электромагнита (соленоида), однако применение его огра- ничено из-за резких (рывком) воздействий на управляемый рабо- чий орган. В обще случае ЭИМ могут относиться как к ИМ постоянной, так и к ИМ переменной скорости (последнее – для объемного ре- гулирования технологической координаты). Иногда ЭИМ ЗРА функционирует в связке с ЭИМ переменной скорости. Пневматический ИМ (ПИМ) – исполнительный механизм, использующий энергию сжатого воздуха или газа. В пневматиче- ских системах автоматики применяют мембранные и поршневые пневмоприводы. Мембранный ИМ – исполнительный механизм, в котором перестановочное усилие хотя бы в одном направлении создается давлением рабочей среды в мембранной полости. Пружинный мембранный ИМ – мембранный исполнительный механизм, в ко- тором перестановочное усилие в одном направлении создается давлением рабочей среды в мембранной полости, а в другом – си- лой сжатой пружины. Поршневой ИМ – исполнительный механизм, в котором пере- становочное усилие создается давлением рабочей среды в поршне- вых полостях. Пружинный поршневой ИМ – поршневой исполнительный механизм, в котором перестановочное усилие в одном направле- нии создается давлением рабочей среды в поршневой полости, а в другом – силой сжатой пружины. Гидравлический ИМ (ГИМ) – исполнительный механизм, использующий энергию жидкости, находящейся под давлением. В гидравлических системах автоматики применяют поршневые гидроприводы. В системах автоматизации нашли очень ограни- ченное применение в силу многих обстоятельств, связанных с применением маслостанции. Электромагнитный ИМ (ЭГМИМ) – исполнительный меха- низм, использующий энергию электромагнита. В АСУТП этот тип ИМ в силу простоты конструкции и реализации алгоритмов управ- ления рассматривается как тривиальный. Ручной ИМ (РИМ) – исполнительный механизм, приводимый в движение, как правило, с помощью рукоятки, штурвала, кнопок управления, командоаппарата и т.п. Достаточно распространен и не всегда конструктивно тривиален. Практически все ИМ ЗРА снабжены возможностью непосред- ственно ручного управления (с помощью штурвала, кнопок или ключей управления, командоконтроллера или иного аппарата), для чего в механической передаче может быть предусмотрена возмож- ность преимущественного и безударного перехода с автоматиче- ского на ручное управление. В зависимости от конструкции реверсивные ИМ подразделяют на простые (двухпозиционные), которые могут перемещать рабочий орган из одного крайнего положения в другое крайнее, и на серво- приводы, которые могут перемещать рабочий орган в любое поло- жение в зависимости от управляющего сигнала и определять поло- жение органа в пространстве. Исходя из этого под исполнительным механизмом часто понимают именно сервопривод (от лат. service – рабочий, слуга и механизм), т.е. исполнительное устройство, ис- пользуемое в качестве вспомогательного исполнительного привода элементов следящих систем управления, рулевых устройств и т.п. ЭИМ постоянной скорости, как правило, обладают возможно- стью самоторможения, т.е. сохранения положения РО в текущем состоянии при исчезновении рабочей среды (электрической, пнев- матической, гидравлической энергии).
|
||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-07-18; просмотров: 260; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.11 (0.007 с.) |