Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Для объектов с самовыравниваниемСодержание книги Поиск на нашем сайте
Тип регулятора Оптимальный переходный процесс ____________________________________________________________________________
апериодический колебательный с 20 % - ным колебательный с мини- перерегулированием мальной площадью
П K P = ПИ K P = T И = 0,8 ПИД K Р = T И = 2,4 T ДИФ = 0,4
Построение переходных процессов. Построение переходных процессов в САУ, вызванных основными для данной системы воздействиями, является завершающим этапом исследования системы. Существуют две группы методов построения пере-ходных процессов: аналитические и графические с использованием частотных характеристик. Аналитические методы основаны на решении дифференциального уравнения системы. Общая методика решения дифференциальных уравнений приведена в раз-деле 2.2.5. В качестве конкретного примера рассмотрим построение переходного процесса по возмущающему воздействию при регулировании уровня ёмкости. САУ описывается следующими уравениями: Уравнение объекта –
Уравнение ПИ – регулятора – Уравнение исполнительного механизма –
S Y = P Y . (2.127)
Подставляя значение S y в уравнение (2.125), получим
После дифференцирования имеем уравнение системы регулирования
Допустим, что в некоторый момент t = 0 возникло ступенчатое возмущение S B = 1. Начальные условия:
Последнее условие получено из уравнения (2.128) при t = 0 и S B = 1. Характеристическое уравнение системы (2.129) имеет вид
Корни уравнения (2.131) равны
Если корни
Постоянные интегрирования С При t = 0 из уравнения (2.133) имеем
0 = С
Дифференцируя уравнение (2.133) при t = 0 имеем
Из уравнений (2.134) и (2.135) определяем С
Подставляя значения С
По уравнению (2.137) может быть построен график переходного процесса (рис. 30.)
Рис. 30.
Графические методы построения переходных процессов основаны на примене-нии частотных характеристик. Амплитудно-фазовую характеристику замкнутой САУ можно представить в виде
Переходная функция связана с действительной частотной характеристикой выра-жением
С помощью выражения (2.139) можно построить искомую переходную функцию h(t) путём графического нахождения входящих в неё интегралов по заданному гра-фику частотной характеристики U
где
Рис. 31. Построение переходной характеристики.
Для характеристики, изображённой на рис.31.а, получаются три трапеции: трапе-ция 1 входит в сумму (2.140) со знаком плюс, а трапеции 2 и 3 со знаком минус. Построение отдельных составляющих h Для каждой составляющей характеристики находим три определяющих её пара-метра: высоту U
|
||
|
|
Последнее изменение этой страницы: 2021-04-12; просмотров: 126; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.147 (0.01 с.) |

 K P =
K P =  K P =
K P = 
 K P =
K P = 

 0,5
0,5  T T И =
T T И = 
 K P =
K P =  K P =
K P = 
 + H = K Y S Y + K B S B. (2.125)
+ H = K Y S Y + K B S B. (2.125)  =
=  . (2.126)
. (2.126) +
+  +
+  =
=  . (2.128)
. (2.128) +
+  +
+  =
=  . (2.129)
. (2.129) =
=  . (2.130)
. (2.130) +
+  +
+  = 0. (2.131)
= 0. (2.131) =
=  , (2.132)
, (2.132) . (2.133)
. (2.133) и С
и С  определим из начальных условий.
определим из начальных условий. +
+  . (2.135)
. (2.135) = -
= -  =
=  . (2.136)
. (2.136) . (2.137)
. (2.137)
 =
=  +
+  . (2.138)
. (2.138) =
= 

 . (2.139)
. (2.139) (
( ). Методика такого построения, разработан-ная В.В. Солодовниковым, называется методом трапеции. Действительную харак-теристику U
). Методика такого построения, разработан-ная В.В. Солодовниковым, называется методом трапеции. Действительную харак-теристику U  (
( , (2.140)
, (2.140) =
= 
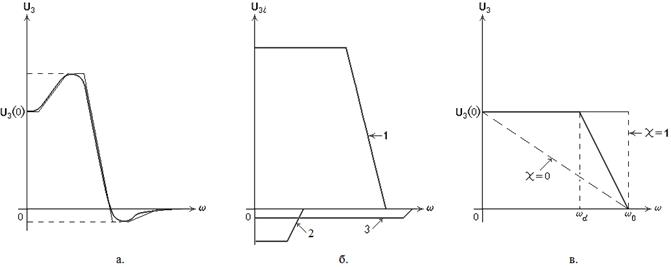
 (t) осуществляется с помощью специальных таблиц переходных функций h(
(t) осуществляется с помощью специальных таблиц переходных функций h( = 1, и, таким образом, каждая характеризуется одним варьируемым параметром
= 1, и, таким образом, каждая характеризуется одним варьируемым параметром  =
=  /
/  (0) и частоты
(0) и частоты  и
и  (рис.31,в). По значениям
(рис.31,в). По значениям  =
=  . Искомую составляющую
. Искомую составляющую  и деления абсцисс
и деления абсцисс