Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Система телеуправления по лучу вращающегося летательного аппарата
При движении ЛА на него могут действовать возмущения, вызванные, например, асимметрией корпуса. Обычно регулирование по возмущающему моменту является статическим. В невращающихся ЛА эту ошибку можно уменьшить за счет увеличения коэффициента усиления разомкнутого контура Другой путь увеличения точности системы ТУ состоит в придании ЛА вращения вокруг продольной оси, благодаря которому действие внешнего момента, обусловленного асимметрией корпуса, осредняется и не приводит к статическому отклонению. При наведении по лучу исключается возможность возникновения статических ошибок по рассогласованию в вертикальной и в наклонной плоскости. Для того чтобы изменять угол рыскания и угол тангажа вращающегося ЛА надо на борту ЛА иметь информацию о вертикальной плоскости. Такая возможность, как и для невращающегося ЛА, обеспечивается применением свободного гироскопа крена, измеряющего угол крена. В этом случае на вход рулевого привода, обеспечивающего управление в вертикальной плоскости поступает сигнал
а на вход рулевого привода, обеспечивающего управление в наклонной плоскости, сигнал
Принципиальная схема управления вращающимся ЛА показана на рис.1.17. На этом рисунке используются следующие обозначения: СГ - свободный гироскоп угла крена (датчик угла крена), ВУ - вычислительное устройство, РМ - рулевая машинка. Знак При использовании формул (1.9) и (1.10) создаются управляющие моменты
У ЛА нормальной схемы и схемы "бесхвостка" при положительных углах закладки руля отрицательна, тогда нужно брать.. У ЛА нормальной схемы и схемы "бесхвостка" при положительных углах закладки руля
У ЛА нормальной схемы и схемы "бесхвостка" при положительных углах закладки руля Управляющие моменты (1.11), (1.12) сводят рассогласования
Пусть возникло рассогласование При произвольном угле крена Тогда по оси
Аналогично, для создания постоянного момента, направленного на устранение
Таким образом, для создания постоянных управляющих моментов по осям Управление лучом происходит так же, как при наведении по лучу невращающегося ЛА.
|
|||||
|
|
Последнее изменение этой страницы: 2021-04-04; просмотров: 173; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.135.249.223 (0.008 с.) |
 , но при этом ухудшается устойчивость контура наведения.
, но при этом ухудшается устойчивость контура наведения. (1.9)
(1.9) (1.10)
(1.10)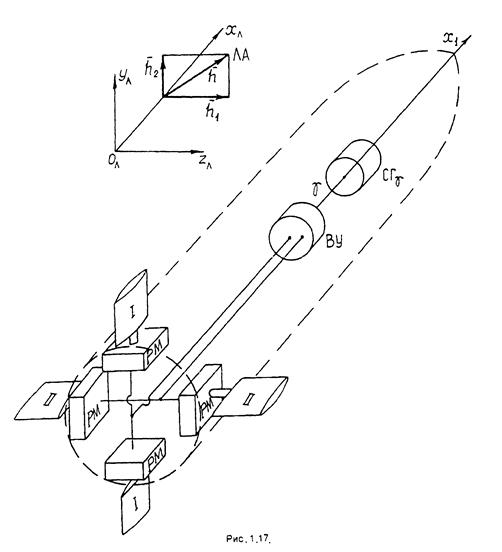
 нужно выбирать в зависимости от аэродинамической схемы ЛА. При положительных
нужно выбирать в зависимости от аэродинамической схемы ЛА. При положительных  и
и  нужно создавать моменты, обеспечивающие движение с отрицательными нормальными перегрузками
нужно создавать моменты, обеспечивающие движение с отрицательными нормальными перегрузками  и
и  .
. (1.11)
(1.11) (1.12)
(1.12) . У ЛА схемы "утка" и с поворотными крыльями при положительных углах закладки руля
. У ЛА схемы "утка" и с поворотными крыльями при положительных углах закладки руля  .
.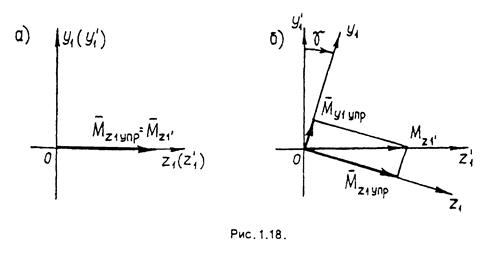
 возникает управляющий момент на рулях II (рис. 1.18а)
возникает управляющий момент на рулях II (рис. 1.18а)  , а в рулевых машинах рулей I он отсутствует. В этом случае рули II выполняют роль вертикальных рулей.
, а в рулевых машинах рулей I он отсутствует. В этом случае рули II выполняют роль вертикальных рулей. рули II будут отклонены на углы
рули II будут отклонены на углы  , а рули I будут отклонены на угол (рис.1.18 б)
, а рули I будут отклонены на угол (рис.1.18 б) 
 создается момент
создается момент
 т.е. при любом угле
т.е. при любом угле 
 необходимо создавать управляющие моменты (1.11) и (1.12).
необходимо создавать управляющие моменты (1.11) и (1.12).