Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Экспериментальный метод кинематического исследования
При экспериментальном исследовании кинематики механизмов кинематические характеристики звеньев и точек механизма определяются и регистрируются с помощью чувствительных элементов - датчиков, которые используя различные физические эффекты преобразуют кинематические параметры в пропорциональные электрические сигналы. Эти сигналы регистрируются измерительными самопишущими приборами (самописцами, осциллографами и др.). В последнее время для регистрации и обработки экспериментальных данных все более широко используются специальные или универсальные компьютеры. Для примера рассмотрим экспериментальную установку для исследования кинематических характеристик синусного механизма (рис. 4.3):
uD= f (t) усилитель
a D = f (t) В этой экспериментальной установке: · для измерения перемещения выходного звена используется потенциометрический датчик перемещения, в котором пропорционально положению движка потенциометра изменяется его сопротивление; · для измерения скорости выходного звена используется индукционный датчик скорости, в котором напряжение на концах катушки движущейся в поле постоянного магнита пропорционально скорости катушки; · для измерения ускорения выходного звена используется тензометрическиий акселерометр. Он состоит из пластинчатой пружины, один конец которой закреплен на выходном звене механизма, а на втором закреплена масса. На пластину наклеены проволочные тензопреобразователи. При движении выходного звена с ускорением инерционность массы вызывает изгиб пластины, деформацию тензопреобразователей и изменение их сопротивления пропорциональное ускорению выходного звена. ОТВЕТ 10)) Проектирование типовых плоских и пространственных механизмов Задачи проектирования При проектировании механизмов различают три этапа: 1. первым этапом является установление кинематической схемы механизма, которая обеспечила бы требуемый вид и закон движения;
2. второй этап – разработка конструктивных форм механизма, обеспечивающих прочность, долговечность, высокий к.п.д. и т.д.; 3. третий этап – разработка технологических и технико-экономических показателей проектируемого механизма, определяемых эксплуатацией в производстве, ремонтами и т.д. Теория механизмов и машин занимается первым этапом. Раздел ТММ, посвященный методам проектирования по заданным кинематическим условиям схем механизмов, получил название – синтеза механизмов. Основные задачи синтеза механизмов: - преобразование вращательного движения вокруг одной оси во вращательное движение вокруг другой оси; - преобразование вращательного движения вокруг одной оси в поступательное движение вдоль некоторой заданной прямой и наоборот; - преобразование поступательного движения вдоль одной заданной прямой в поступательное движение вдоль другой заданной прямой; - воспроизведение одной из точек звеньев рычажного механизма требуемой траектории, воспроизведение заданных углов поворота выходного звена, движение выходного звена с остановами. Механизмы передачи Предназначены для передачи вращательного движения между звеньями. Передача вращательного движения может производиться с изменением угловой скорости вращения, с сохранением или изменением направления вращения. Параметр, характеризующий при передаче движения изменение скорости и направления, называют передаточным отношением:
где знак (+) если вращение звеньев в одном направлении; знак (-) если вращение звеньев в противоположных направлениях; n 1, w1 - соответственно частота, об/мин. и скорость вращения, рад/с, вала 1; n 2, w2 - соответственно частота, об/мин. и скорость вращения, рад/с, вала 2. Примечание: Знак передаточного отношения имеет смысл при передачи движения между звеньями с параллельными осями. Механизмы передачи (механические передачи) классифицируются в зависимости от названия основных звеньев: фрикционные, ременные, цепные, зубчатые, червячные, волновые. Все передачи характеризуются количеством ступеней. Одноступенчатая – это передача образованная двумя подвижными звеньями, образуемыми низшие пары со стойкой и высшую пару между собой (рис. 4.4).
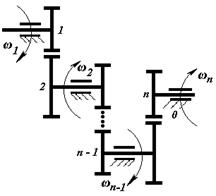
Многоступенчатая – несколько ступеней соединенных последовательно (рис. 4.5). Общее передаточное отношение любого типа сложного зубчатого механизма i 1 n, включающего несколько последовательно соединенных друг с другом простых (одноступенчатых) механизмов, равно произведению передаточных отношений отдельных простых механизмов (ступеней), входящих в его состав, т.е.:
Так, для механизма, представленного на рис. 4.5 общее передаточное отношение равно:
Кроме одноступенчатых и многоступенчатых применяются планетарные и волновые передачи. Фрикционные передачи. Вариатор скорости. Зубчатые механизмы. Основная теорема зацепления. Геометрические параметры зубчатых колес. Фрикционные передачи Фрикционные передачи предназначены для передачи вращательного движения за счет сил трения (рис. 5.1).
Условием передачи движения во фрикционном механизме является:
где Р 21, Р 12 – передаваемое усилие; F тр – сила трения в месте контакта валков 1 и 2, определяемая по формуле:
где Q – нормальное усилие прижима валков; f – коэффициент трения скольжения. Так как чаще всего f» 0,2…0,3, то для передачи движения во фрикционной передаче усилие прижима должно быть приблизительно в 5 раз больше, чем передаваемое усилие. Рассмотрим общую для валков точку контакта валков А, её окружная скорость равна: для первого валка При отсутствии проскальзывания валков
Цилиндры перекатывающиеся один относительно другого без проскальзывания называются начальными. Окружности, получающиеся в пересечении этих цилиндров плоскостью перпендикулярной их осям называются начальными (радиусы r 1 и r 2). Передаточное отношение имеет знак: «-» когда направления движения не совпадают (т.е. когда касание внешнее, рис. 5.2, а); «+» когда направления движения совпадают (т.е. когда касание внутреннее, рис. 5.2, б).
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-06; просмотров: 431; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.16.218.105 (0.038 с.) |

 Датчик перемещения
Датчик перемещения

 1 2
1 2









 B, C R
B, C R


 SD = f (t)
SD = f (t)

 A D
A D


 Датчик Датчик
Датчик Датчик 0 скорости N S ускорения
0 скорости N S ускорения


 , или
, или  ,
,

 .
.

 ,
, ,
, , для второго валка
, для второго валка  .
. , тогда:
, тогда: ®
®  .
.