Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Разработка цифрового устройства на основе управляющего автомата МилиСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте Автомат Мили имеет структуру, приведенную на рис. 1. И поведение его работы описывается теми же общими формулами Y=ƒ1(X,T), D=ƒ2(X,T). Поэтому иногда говорят, что этот автомат генерирует (в смысле изменяет) выходные сигналы при переходах из одного состояния в другое. Здесь подчёркивается тот факт, что Y непосредственно зависит от X. Цифровой автомат может задаваться как правило двумя способами: в виде граф - схемы алгоритма (графа); виде таблицы переходов.
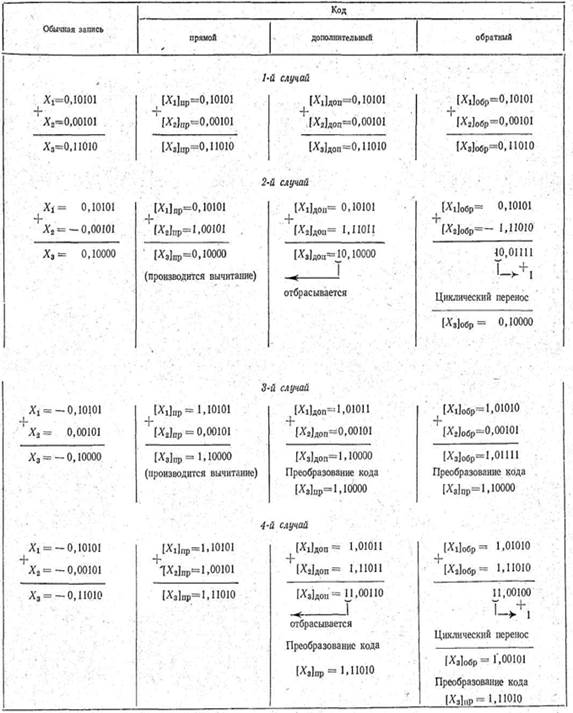
Рассмотрим синтез простейшего цифрового устройства сложения двух двоичных чисел в дополнительном коде. Условимся, что одно из чисел D1, будет всегда положительным, а второе может быть как положительным так и отрицательным. Правило сложения чисел в различных кодах приведено на рисунке 2. Рисунок 2 - Правила сложения двоичных чисел
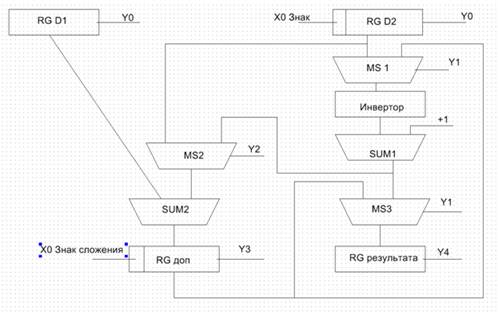
Структурная схема одного из вариантов устройства приведена на рисунке 3.
Рисунок 3 - Структурная схема устройства
где: RG D1,RGD2 - входные регистры для хранения входных данных; MS1, MS2, MS3 - цифровые мультиплексоры 8 на 4; Инвертор - для получения обратного кода; SUM1, SUM2 - сумматоры; RGдоп - регистр для хранения промежуточной суммы в дополнительном коде; RG результата - регистр для хранения результата сложения. )
Работа устройства. Данные по переднему фронту сигнала У0 D1 и D2записываются в входные регистры(см. схему "Регистр" в папке лабораторной работы). Если оба числа положительные, знак Х0 равен 0 и D2 проходит через открытые по умолчанию мультиплексоры MS1, MS2(см. схему "Мультиплексор" в папке лабораторной работы).Результат сложения записывается в RG доп. Если результат сложения положительный, то значение суммы через нормально открытый MS3 сигналом Y5 записывается в RG результата. Если D2 отрицательно (Х0=1), то D2 проходит через нормально открытый MS1, далее инвертируется, на сумматоре к нему прибавляется единица, и дополнительный код D2, через открытый сигналом Y2 мультиплексор MS2 поступает на сумматор. Если результат сложения в RG доп положительный (Х1=0), результат сложения записывается в RG результата сигналом Y5. Если результат отрицательный (Х1=1), то результат сложения по сигналу Y1через мультиплексор MS1 поступает на инвертор, после к нему добавляется единица и результат сложения по сигналу Y4 пройдя мультиплексор MS3 по сигналу Y5 записывается в RG результата.
Синтез управляющего автомата Мили Шаг 1. Разметка ГСА 1. Символом Q0 помечаем вход вершины, следующий за начальной и вход конечной вершины 2. Входы всех вершин, следующих за операторными, помечаем символами состояний Q1-Q5. 3. Вход вершины отмечаются одним символом.
Схема алгоритма приведена на рисунке:
Рисунок 4 - Размеченная ГСА автомата Мили
Как видим наш автомат должен иметь k = 6 состояний (Q0-Q5). Для его построения необходимо n=]log26[= 3 элемента памяти. В качестве элемента памяти будем использовать четырехразрядный параллельный регистр. Шаг 2 Кодирование состояний Зададим таблицу кодировки состояний
|
|||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-02-19; просмотров: 495; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.216 (0.01 с.) |