Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Динамика полёта вертолета Ми-8Содержание книги
Поиск на нашем сайте Динамика полёта вертолета Ми-8 «Основы аэродинамики несущего винта, рулевого винта и планера вертолета» Методическое пособие
Автор: преподаватель Васильев В.С.
Омск 2012 Содержание Методические рекомендации
Программа по практической аэродинамике вертолета предусматривает усвоение физической сущности полета, техники пилотирования, взаимовлияния различных эксплуатационных факторов. Все разделы программы базируются на сведениях об аэродинамике несущего винта (НВ) вертолета, его характеристиках на различных режимах обтекания. Поэтому от понимания работы НВ зависит усвоение тех разделов, где рассматриваются технология выполнения полета, эксплуатационные ограничения и их обоснование. При изучении аэродинамики НВ необходимо учитывать более сложный, по сравнению с крылом самолета, характер обтекания отдельных элементов лопастей. При этом основное внимание необходимо уделять физической картине возникновения аэродинамических сил, используя законы классической механики. Рекомендуется более подробно рассматривать влияние основных эксплуатационных факторов на силу тяги и момент сопротивления НВ, распределение аэродинамических нагрузок по ометаемой поверхности. Усвоение этих вопросов позволит глубже понять особенности работы НВ с шарнирным креплением лопастей, образование естественного и управляемого завалов конуса вращения, срыва потока с лопастей, вибраций и других явлений, с которыми сталкивается экипаж в полете. При изучении принципов управления необходимо обратить внимание на особенности совместной работы НВ и двигателей, условия выдерживания в полете заданной частоты вращения НВ. Такие явления, как срыв потока, флаттер, сближение лопастей с балкой, вихревое кольцо нужно уметь объяснять с позиции аэродинамики. При изучении работы рулевого винта (РВ) необходимо учитывать особенности обтекания лопастей РВ в различных эксплуатационных условиях, влияние тяги РВ на запасы путевого управления вертолетом. В отдельной теме изучается особенность аэродинамики планера, понятие потребной и располагаемой мощностей.
Рис.1.1 Угол атаки НВ
Режим осевого обтекания НВ отличается тем, что воздушный поток направлен параллельно оси вращения винта. Угол атаки НВ при этом составляет 90°. На этом режиме НВ работает при вертикальном подъеме, снижении, на висении. Режим, косого обтекания НВ получается в том случае, если воздушный поток, возникающий при движении вертолета, направлен под некоторым углом атаки к плоскости вращения НВ. На таком режиме НВ работает при выполнении горизонтального полета, снижения или набора высоты по наклонной траектории. Режим плоского (бокового) обтекания имеет место тогда, когда воздушный поток направлен параллельно плоскости вращения НВ. Угол атаки НВ при этом равен нулю. Режим вихревого кольца НВ возникает при снижении вертолета с работающими двигателями на малой поступательной скорости. В этом случае воздушный поток проходит через ометаемую площадь НВ сверху вниз, и вновь тот же объем воздуха возвращается во всасывающую часть НВ. Работа НВ в условиях самовращения качественно отличается от других режимов, так как НВ получает энергию для вращения от набегающего потока. Воздушный поток подходит снизу к плоскости вращения, и угол атаки НВ является положительным. На практике режим самовращения НВ применяется при отказе двигателей, поломке трансмиссии НВ и в других случаях. Вывод: Параметры, определяющие характеристики НВ, тщательно подбираются в процессе проектирования и испытания НВ, так как от них зависят основные летно-технические данные вертолета.
Рис.1.3 Образование тяги НВ на режиме косого обтекания
За счет увеличения секундной массы воздуха происходит увеличение тяги НВ по сравнению с режимом осевого обтекания. Для расчета тяги НВ используется постулат Н.Е.Жуковского, согласно которому в образовании тяги НВ участвует масса воздуха, заключенная внутри цилиндра с диаметром, равным диаметру НВ. Поэтому вывод формулы тяги идеального НВ аналогичен расчёту для режима осевого обтекания: Tн=mc (Vi2-0)=2mcVi1 mc =rFнVS; VS=Vi1+V, где VS - суммарная скорость потока, проходящего через НВ. VS»V, Поэтому mc»rFнV; Tн=2rFн Vi V; Vi=T/2rFнV.
Для реального НВ: Тн = 2rFн χ Viср V.
При увеличении поступательной скорости тяга возрастает, так как увеличивается секундная масса воздуха. При сохранении тяги НВ постоянной уменьшается индуктивная скорость Vi, т.к. уменьшается шаг НВ. При уменьшении шага и сохранении частоты вращения НВ уменьшается подводимая мощность. Следовательно, эффект косого обтекания приводит к существенному увеличению тяги НВ без подвода дополнительной мощности двигателей. При этом создается дополнительный запас мощности на вертолете. Однако увеличение тяги происходит только до V= 120 км/ч. При дальнейшем увеличении скорости тяга снижается из-за роста потерь на НВ (срыва потока, волнового кризиса, расширения зоны обратного обтекания, профильного сопротивления на лопастях).
Вывод: Импульсная теория позволяет просто и наглядно объяснить сущность возникновения аэродинамической силы тяги НВ с помощью законов классической механики, устанавливает связь между тягой и массовым секундным расходом воздуха. Теория идеального НВ предполагает, что вся мощность, подводимая к НВ, расходуется только на создание индуктивной скорости. Тяга реального НВ снижается за счет потерь, возникающих в процессе взаимодействия НВ с воздушным потоком. Контрольные вопросы 1.Объяснить схему взаимодействия НВ и осевого потока. 2.Что представляет собой индуктивная скорость, как она изменяется вдоль оси НВ? 3.Какие факторы влияют на индуктивную скорость подсасывания? 4.Объяснить причину образования тяги НВ на режиме осевого обтекания. 5.Какие потери имеет реальный НВ по сравнению с идеальным? Что понимается под профильной мощностью НВ? 6.Объяснить схему взаимодействия НВ с косым потоком. 7.Как влияет эффект косого обтекания на тягу НВ?
Рис. 1.4. Скорости обтекания элемента лопасти
Радиус, азимут и угол установки определяют положение отдельного элемента лопасти на ометаемой поверхности НВ, а также относительно КПВ. Осевое обтекание НВ. Каждый элемент лопасти находится под воздействием двух потоков: окружного - со скоростью wнr и осевого со скоростью Vi+Vy, где Vi - индуктивная скорость, Vy - скорость вертикального перемещения вертолета (на висении Vy = 0). Рассмотрим движение лопасти только в плоскости вращения. При движении лопасти по ометаемой площади окружные скорости изменяются только по длине лопасти (в зависимости от радиуса элементов). От азимута они не зависят и равномерно распределены по ометаемой площади, при этом концевые элементы лопастей имеют максимальные скорости обтекания (Рис.1.5). Рис.1.5 Распределение скоростей обтекания лопастей
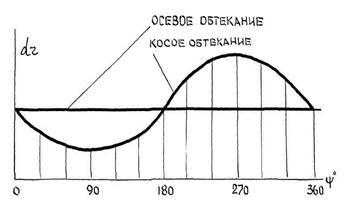
Э ффективная скорость получается от сложения двух потоков: окружного и от косой обдувки НВ (поступательной скорости) Vosiny: Vэф=wнr+Vosiny, где y - угол азимутального положения лопасти; Vosiny - проекция скорости вcтречного потокаот поступательного движения V на направление вращения элемента (рис. 1.4). Из формулы следует, что значение эффективной скорости Vэф зависит от азимута лопасти. Графическая зависимость Vэф от y представлена на рис.1.6. График имеет вид синусоиды, смещенной вверх на величину wнr.
Рис.1.6 Изменение эффективной скорости элемента Рис.1.7 Аэродинамические силы элемента лопасти
Для режима осевого обтекания: Wr=Vi+Vy+wн r; Для режима косого обтекания: Wr=wнr+V0siny+Vi+Vy+Vвзм+Vsina. Для каждого элемента лопасти можно построить треугольник скоростей обтекания, изменяющийся в зависимости от режима полета. При этом изменяется положение и величина суммарного результирующего потока элемента лопасти Wr. Угол атаки элемента лопасти
Углом атаки элемента лопасти ar называется угол, заключенный между вектором скорости результирующего потока и хордой профиля элемента (рис. 1.7). Определяется по формуле: ar=jr- br, где jr - угол установки элемента; br - угол притекания элемента, определяющий положение результирующего потока относительно КПВ. tgbr=Voc/Vэф=(Vi+Vy+Vвзм+Vsinaн)/(wнr+Vosiny).
Из формулы следует, что углы атаки элементов лопасти зависят от следующих факторов: шага НВ, вертикальной обдувки, поступательной скорости, угла атаки НВ, частоты вращении НВ и положения элемента на ометаемой поверхности (азимута, радиуса). При перемещении рычагов управления пилот изменяет углы установки лопастей, а также углы атаки НВ, тем самым воздействуя на углы атаки элементов лопасти. В зависимости от углов атаки на лопастях изменяется характер обтекания элементов лопастей и величина аэродинамических сил.
Контрольные вопросы
1.Какие преимущества имеет теория элемента лопасти перед импульсной теорией? 2.Что понимается под эффективной скоростью обтекания элемента лопасти? 3.Что представляет собой осевая скорость обтекания элемента?
4. Как изменяется эффективная скорость в зависимости от азимута лопасти: в осевом потоке? В косом потоке? 5.Как изменяется эффективная скорость в зависимости от радиуса элемента? 6.Как изменяются скорости обтекания наступающих и отступающих лопастей при работе НВ в косом потоке? 7.Что представляет собой обратное обтекание лопастей? В чем причина образования зоны обратного обтекания, и какие факторы влияют на ее размер? 8.Как влияет обратное обтекание элементов на работу НВ? Какие ограничения вводятся по зоне обратного обтекания? 9.Что представляет собой результирующая скорость обтекания элемента лопасти? Что понимается под углом атаки элемента лопасти? Какие основные факторы полета влияют на углы атаки лопастей НВ? И реактивного момента НВ
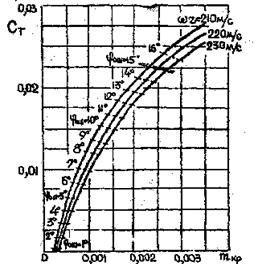
В целях сохранения расчетных оборотов НВ увеличивается потребный крутящий момент двигателей. Поэтому возрастает коэффициент крутящего момента НВ: mкр=2Nex/r(wн r) 3Fн. Здесь Ne - эффективная мощность двигателей. На основе расчетов или опытных данных строится графическая зависимость коэффициентов СТ и mкр от углов установки лопастей НВ - поляра несущего винта (Рис.1.9):
Рис.1.9 Поляра несущего винта 1.6.3 Факторы, влияющие на силу тяги и крутящий момент НВ:
2. Шаг НВ. Увеличивается при перемещении вверх рычага "шаг-газ". При этом увеличиваются углы атаки на лопастях, следовательно, коэффициенты СТ, mкр, Т и Мкр. 3. Частота вращения НВ. При увеличении nн возрастают окружные скорости обтекания, тяга первоначально возрастает пропорционально (wнr)2. Однако при достижении некоторой максимальной частоты вращения рост тяги прекращается, резко возрастает момент сопротивления, так как на концах наступающих лопастей развивается явление волнового кризиса. Поэтому установлена оптимальная частота вращения НВ, которая поддерживается постоянной для получения максимального кпд НВ. 4. Поступательная скорость (скорость ветра). При увеличении скорости (при сохранении постоянного шага НВ) до Vэк наблюдается увеличение СТ и Т, так как в косом потоке увеличивается секундная масса воздуха, проходящая через НВ. На V> Vэк наблюдается снижение Ст и Т. Это объясняется уменьшением секундной массы воздуха вследствие потерь за счет срыва потока, обратного обтекания, волнового кризиса и др. 5. Угол атаки НВ. Увеличение aН ведет к увеличению углов атаки 6. Плотность воздуха (tнв, давление, Нбар, влажность). При повышении плотности r тяга Т и момент Мкр возрастают прямо пропорционально и наоборот, так как при изменении плотности изменяются значения аэродинамических сил элементов лопастей. Выводы: 1. Тяга НВ - это суммарная аэродинамическая сила лопастей, действующая вдоль оси вращения НВ. 2. Крутящий момент - это аэродинамический момент, создаваемый силами сопротивления лопастей относительно оси вращения НВ и действующий против вращения НВ(рис.1.8). 3. Если геометрия НВ задана, и частота вращения поддерживается постоянной, тяга и крутящий момент зависят от атмосферных условий, угла атаки и шага НВ. Для увеличения тяги НВ пилот увеличивает шаг НВ, но при этом растет момент сопротивления вращению НВ. Для сохранения неизменной частоты вращения НВ необходимо увеличить мощность двигателей, так как должно выдерживаться равенство: МН=Мдв=7030Ne/nн, где Ne - эффективная мощность двигателей, nн - частота вращения НВ.
Рис.1.11 Схема НВ с жестким закреплением лопастей Максимальное значение тяги лопасти имеют в азимуте 90°, минимальное - 270° причем корневые элементы отступающих лопастей имеют отрицательные тяги, находясь в зоне обратного обтекания. Следовательно, тяги лопастей и их изгибающие моменты циклически изменяются в зависимости от азимута лопасти. Суммарная тяга лопастей - тяга НВ Тн при жестком закреплении лопастей к втулке действует не вдоль оси НВ, точка ее приложения смещена в сторону наступающих лопастей. Поэтому на вертолет со стороны НВ действует так называемый опрокидывающий момент. Выводы: I. При осевом обтекании НВ аэродинамические силы тяги (подъемные силы) лопастей распределены равномерно по ометаемой поверхности. Изгибающие моменты лопастей при их жестком закреплении одинаковы в любом азимуте. 2. При косом обтекании НВ тяги и изгибающие моменты распределены неравномерно по ометаемой площади: на наступающих лопастях тяги больше, на отступающих - меньше. Чем больше скорость косой обдувки, тем более неравномерный характер имеет распределение аэродинамических сил по ометаемой площади.
Горизонтальных шарниров(ГШ)
Равновесие лопасти относительно ГШрассматривается на схеме рис.1.12: Рис.1.12 Равновесие лопасти относительно ГШ При вращении лопасти на нее действуют следующие силы: - подъемная сила Уал, приложенная в центре давления на расстоянии а от оси ГШ; - сила тяжести Gл, приложенная в центре масс лопасти на расстоянии в; -центробежная сила Fцб, приложенная в центре масс лопасти на расстоянии С. Действуя на своем плече, каждая сила создает момент относительно оси ГШ. Момент от подъемной силы Муа=Уал ∙а поднимает лопасть относительно КПВ, увеличивает угол взмаха βл. Момент от силы тяжести МG=G ∙в заставляет лопасть опускаться к КПВ и ниже, т.е. уменьшает угол взмаха. Момент от центробежной силы Мцб=Fцб ∙с стремится "растянуть" лопасть, установить ее в плоскости вращения НВ. Условием равновесия лопасти относительно ГШ является равенство нулю алгебраической суммы моментов действующих сил: åМгш=Му - МG-Мцб=0. При этом равнодействующая сил лопасти Rл проходит через ось ГШ, т.е. Rл ∙0=0. В состоянии равновесия лопасти находятся под одинаковыми углами взмаха βл относительно плоскости вращения, т.е. при работе НВ на режиме осевой обдувки. На углы взмаха βл оказывают влияние: режим работы НВ, углы установки лопастей, масса лопастей, частота вращения НВ. При изменении этих параметров равновесие лопасти нарушается. Маховые движения лопастей При переходе НВ на режим косого обтекания подъемные силы лопастей непрерывно изменяются по азимуту, поэтому состояние равновесия лопастей непрерывно нарушается. Возникают маховые движения - это непрерывные повороты лопастей относительно ГШ в случае обтекания НВ косым потоком. Углы взмаха βл при этом изменяются по определенному закону, зависящему от изменения подъемных и инерционных сил лопастей. Для расчета углов взмаха лопасти используется формула подъемной силы лопасти: Уал@Тл=0,5СТЛ ∙r(wН r + V0siny)2Fл. Здесь коэффициент СТЛ определяется по поляре профиля лопасти для сечения В азимутах y от 0 до 90о эффективная скорость Vэф возрастает. В азимуте 90° лопасть получает максимальный прирост скорости (ускорение), а значит, максимальный прирост подъемной силы Уал на взмах вверх. y= 90+180°. Эффективная скорость уменьшается до окружной, т.е. в азимуте 180° прирост скорости отсутствует. Появляется сила инерции лопасти FИН, препятствующая уменьшению взмаха. Таким образом, на прирост подъемной силы Уал, возникший в азимуте 90°, лопасть отреагирует максимальным взмахом в азимуте 180°, т.е. с запаздыванием на 90° (180° - 90°). В азимуте 180° встречный поток со скоростью V0 набегает на взмахивающую лопасть снизу, вследствие чего углы атаки лопасти увеличиваются (рис. 1.13):
Рис.1.13 Действие встречного потока на взмахивающую лопасть
Возникает прирост коэффициента СТ и подъемной силы лопасти. Лопасть получает дополнительный импульс на взмах вверх и реагирует на него подъемом в азимуте 270°, т. е. с запаздыванием на 90° (270° - 180°). y = 180°+270°. Эффективная скорость продолжает уменьшаться. В азимуте 270° лопасть имеет максимальное скорости, а значит, максимальное уменьшение подъемной силы Уал и взмаха вниз. y = 270°+360°. Эффективная скорость увеличивается до окружной, т. е. в азимуте 360° прирост скорости практически отсутствует. Сила инерции лопасти FИН препятствует увеличению взмаха лопасти. На максимальное уменьшение скорости в азимуте 270° лопасть отреагирует уменьшением взмаха до минимального значения в азимуте 360°, т.е. с запаздыванием на 90° (360°- 270°). В азимуте 360° (0°) встречный поток V0 набегает на лопасть сверху, вследствие чего углы атаки лопасти уменьшатся (рис. 1.14). Это вызывает уменьшение коэффициента СТ и подъемной силы лопасти Уал. За счет этого лопасть получает дополнительный импульс на взмах вниз и реагирует на него опусканием вниз с запаздыванием на 90° (90° - 0°). Таким образом, маховые движения лопастей совершаются под влиянием нескольких факторов: от изменения эффективных скоростей обтекания, инерционных сил, углов атаки лопастей. В свою очередь, углы атаки лопастей изменяются от действия встречного потока Vо (рис. 1.13), вертикальной обдувки лопасти при взмахе, а также от циклического изменения углов установки лопастей (циклического шага НВ).
Рис.1.14Распределение углов взмаха по азимуту
Из рисунка видно, что углы взмаха лопасти непрерывно изменяются по синусоидальному закону. С каждым оборотом несущего винта характер изменения углов взмаха циклически повторяется. Примечание: График в виде сплошной линии построен для НВ, не имеющего регулятора взмаха. Выводы: 1. При установке горизонтальных шарниров каждая лопасть при работе НВ в косом потоке совершает маховые движения, так как равновесие лопасти непрерывно нарушается. Равновесие лопасти достигается лишь в двух азимутальных положениях, соответствующих максимальному (βmax) и минимальному (βmin) углам взмаха. 2. На углы взмаха лопастей оказывают влияние: режим работы НВ (скорость поступательного движения); углы установки лопастей (шаг НВ); частота вращения НВ; аэродинамическое демпфирование лопастей; положение кольца автомата перекоса (циклический шаг); наличие механического регулятора взмаха; масса лопастей.
Рис. 1.15 Аэродинамическое демпфирование лопасти
Поэтому значение подъемной силы Уал поднимающейся лопасти уменьшается, что препятствует интенсивному взмаху лопасти вверх. При взмахе лопасти вниз (например, в азимуте 270°) дополнительный осевой поток воздействует на элементы лопасти снизу вверх. Углы атаки элементов увеличиваются. Значение подъемной силы Уал опускающейся лопасти увеличивается, что препятствует интенсивному взмаху лопасти вниз. Таким образом, в процессе взмахов лопастей за счет изменения углов атаки происходит естественное гашение маховых колебаний (демпфирование).
Рис.1.16 Изменение углов атаки элементов лопастей от азимута
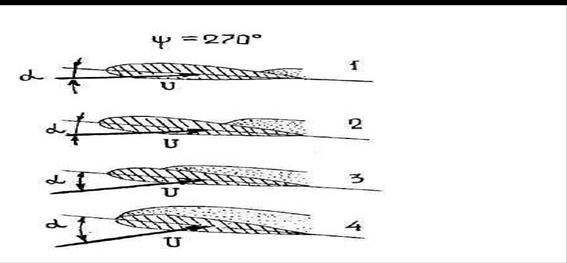
Характер изменения углов атаки элементов лопастей ar в зависимости от азимута показан на рис. 1.16. Из рисунка видно, что углы атаки наступающих лопастей уменьшаются, а отступающих- увеличиваются по сравнению с осевым обтеканием. Причем, увеличение углов атаки на отступающих лопастях происходит в большей степени, чем уменьшение на наступающих лопастях (оказывает влияние действие силы тяжести на опускающихся лопастях). Наименьшие углы атаки лопасть имеет в азимуте 90°, наибольшие имеют концевые элементы лопасти в азимуте 270°. Поэтому при определенных условиях на концах отступающих лопастей в азимуте 270° возникает явление срыва потока (рис.1.17):
Срыв потока на этапах 1,2,3,4 развивается вследствие увеличения углов атаки отступающих лопастей больше критических значений при их движении вниз. Рис.1.17 Явление срыва потока на профиле лопасти
Влияние срыва потока на аэродинамические характеристики НВ рассматривается отдельно. 5. Масса лопастей. При увеличении массы лопастей углы взмаха уменьшаются. Вследствие значительного преобладания центробежной силы над силой тяжести (более чем в 50 раз) лопасть приближается к плоскости вращения. 6. Положение кольца автомата перекоса (циклического шага). Рассматривается в теме «Управление НВ». Регулятор взмаха Интенсивные маховые движения лопастей нежелательны, так как они приводят к следующим отрицательным явлениям: - возрастают динамические нагрузки на конструкцию несущей системы; - возникает опасность удара лопастей по ограничителям ГШ и хвостовой балке; - затрудняется балансировка вертолета в полете при сильной турбулентности воздуха, а также при висении с ветром; - расширяется зона срыва потока на концевых элементах отступающих лопастей; - возникает явление неустойчивости маховых движений ("заброс" лопастей), вызываемое кинематическим увеличением углов установки лопастей при наличии отставания лопастей относительно ВШ. Существует несколько способов ослабления маховых движений: - аэродинамическое демпфирование лопастей; - действие центробежных сил лопастей; - применение механического регулятора взмаха. Первые два способа недостаточны для получения приемлемых динамических характеристик НВ, поэтому в конструкцию системы управления НВ введен механический регулятор взмаха (поводковая компенсация). Регулятор взмаха - это кинематическая связь между подвижным кольцом тарелки автомата перекоса и осевым шарниром (ОШ) лопасти (рис. 1.18).
Рис.1.18 Регулятор взмаха лопасти
Конструктивно поводковая компенсация достигается смещением точки крепления тяги управления углами установки лопасти (промежуточного шарнира) параллельно оси ГШ на расстояние а. При этом промежуточный шарнир образует с ГШ угол σк (рис. 1.18). Кd=tg σк =а/в — это характеристика регулятора взмаха. Принцип действия регулятора заключается в том, что ось поворота лопасти не совпадает с осью ГШ, а проходит под углом σк. Это приводит к тому, что при некотором угле взмаха лопасти, например вверх, её передняя кромка проходит путь меньше, чем задняя. Поэтому при движении лопасти вверх она одновременно поворачивается относительно осевого шарнира (ОШ) на уменьшение угла установки j. Происходит уменьшение углов атаки элементов, коэффициента тяги СТ , прироста подъемной силы лопасти Уал. Следовательно, это препятствует увеличению угла взмаха. При движении вниз лопасть поворачивается на увеличение угла установки, при этом увеличиваются углы атаки, коэффициент СТ и прирост подъемной силы, что препятствует уменьшению угла взмаха лопасти. Выводы: 1. С помощью регулятора взмаха механическим способом повышается аэродинамическое демпфирование лопастей. Чем больше значение Кd регулятора, тем значительнее изменение углов установки лопастей при взмахе, тем выше эффективность работы регулятора. Однако с ростом Кd увеличиваются углы атаки на опускающихся лопастях, быстрее наступает явление срыва потока. Для Ми-8 выбрано оптимальное значение: Кd = 0,5. 2. Работа регулятора взмаха дает следующие преимущества работы НВ: более равномерное распределение тяг лопастей по ометаемой площади, ускоряется переход НВ на режим самовращения (рассматривается в теме «Особые случаи полета»), НВ имеет более выгодный боковой завал конуса вращения.
Рис.1.20 Распределение тяг лопастей па режиме косого обтекания
Лопасти совершают маховые движения, поэтому одновременно со скоростями обтекания изменяются углы атаки элементов лопастей (рис. 1.17), при этом скорости и углы атаки влияют на тяги лопасти прямо противоположно. Из формулы расчета тяги лопасти Тл=0,5 СТ Л∙ r(wнr+Vosiny)2F следует, что увеличение скорости обтекания wнr+Vosiny и одновременное уменьшение коэффициента тяги СТ приводит к выравниванию тяг лопастей по всей ометаемой площади. При этом тяги (подъёмные силы) Уал наступающих и отступающих лопастей приближаются по своему значению к осевому обтеканию(рис. 1.21 график 3).
Осевое обтекание Косое обтекание,жесткий НВ Рис.1.21 Распределение тяг лопастей по азимуту
При наличии поводковой компенсации (регулятора взмаха) кинематика регулятора позволяет получить дополнительное увеличение углов атаки при взмахах лопасти вниз (увеличение коэффициентов СТ) и дополнительное уменьшение углов атаки при взмахах лопасти вверх (уменьшение коэффициентов СТ). При этом уменьшается разница в тягах наступающих и отступающих лопастей – тяги распределяются наиболее равномерно по ометаемой площади (рис.1.21,график 4). Вывод: Шарнирный НВ, снабженный ГШ, имеет следующие преимущества: - изгибающие моменты на втулку не передаются, так как под действием моментов сил лопасти поворачиваются относительно ГШ. Разгружается лопасть и втулка, конструкция облегчается, снижается масса конструкции НВ и вертолета, повышается ресурс несущей системы; - устраняется опрокидывающий момент НВ так как выравниваются моменты от тяг в различных азимутальных положениях лопастей (рис. 1.20). Благодаря этому увеличивается максимальная скорость вертолета и повышаются запасы поперечного управления. - распределение тяг по ометаемой площади становится более равномерным, снижаются вибрации вертолета, упрощается процесс балансировки вертолета.
Рис.1.22 Конус вращения несущего винта При косом обтекании равновесие лопастей непрерывно нарушается и лопасти имеют различное положение над конструктивной плоскостью НВ(см. рис.1.15). При этом углы взмаха зависят от совместного действия различных факторов. При раздельном рассмотрении этих факторов получается следующая картина. За счет прироста эффективных скоростей и инерционных сил лопасти максимальный взмах получился бы в азимуте 180°. Угол взмаха увеличивается по сравнению с осевым обтеканием и составляет β0 +α1. Минимальный взмах получился бы в азимуте 360°, угол взмаха уменьшился бы при этом на то же значение и составил бы β0 - α1. За счет изменения углов атаки на поднимающихся и опускающихся лопастях, вызванных действием встречного потока (рис. I.I4), лопасть должна достигнуть максимального взмаха в азимуте 270°, угол взмаха увеличиться по сравнению с осевым обтеканием и составит β0 +в1. Минимального взмаха лопасть должна достигнуть в азимуте 90°, угол взмаха уменьшиться на то же значение и составит β0 -в1. Под влиянием рассмотренных факторов лопасти образуют так называемый заваленный конус вращения, у которого образующие - лопасти, расположенные под разными углами относительно КПВ. В продольной плоскости (по потоку) конус вращения отклоняется на угол α1 в поперечной плоскости - на угол в1. Завал конуса вращения может быть естественный (самопроизвольный), вызываемый действием встречного потока, и управляемый, вызываемый циклическим изменением углов установки лопастей (циклического шага) при отклонениях тарелки автомата перекоса в процессе управления вертолетом (рассматривается в следующем разделе). Если бы не было регулятора взмаха, ось конуса вращения отклонялась бы назад и влево. Максимальный угол взмаха находился бы в азимуте 200+210°, минимальный - в азимуте 20÷30° (см. рис. 1.15).
Работа регулятора взмаха приводит к снижению амплитуды взмахов, противодействию инерционных сил лопастей, поэтому уменьшается запаздывание маховых колебаний лопастей. Направление бокового завала конуса вращения изменяется на противоположное - с левого на правое,т. к. изменяются значения азимутов, где углы взмаха (конусности) достигают максимальных и минимальных значений. Максимальный угол взмаха получается в азимуте 160÷170°, минимальный - в азимуте 340÷350° (рис. I.15). Следовательно, с регулятором взмаха ось конуса вращения отклоняется назад и вправо. При наклоне конуса вращения изменяется положение равнодействующей силы лопасти Выводы: I. Под действием встречного потока происходит естественный завал конуса вращения НВ. 2. Без регулятора взмаха конус отклоняется назад и влево, с регулятором взмаха - назад и вправо. 3. Завал конуса вращения НВ сопровождается поворотом вектора равнодействующей НВ Примечание: Боковой завал конуса вправо является более выгодным, так как отклонение равнодействующей Факторами, влияющими на величину завала конуса вращения НВ, являются: скорость встречного потока (поступательного движения, ветра), шаг НВ, частота вращения НВ. С увеличением скорости встречного потока конус вращения дополнительно заваливается: назад и вправо, так как усиливаются маховые движения, увеличиваются углы конусности α1 и β 1. При увеличении шага НВ при заданной скорости обтекания возрастают амплитуды маховых движений лопастей, конус заваливается назад и вправо. При увеличении оборотов НВ конус заваливается вперед и влево, так как под действием дополнительных центробежных сил углы взмахов лопастей уменьшаются. Наоборот, при уменьшении о
|
|||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-02-06; просмотров: 5879; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.3 (0.013 с.) |

 по ометаемой площади Косое обтекание НВ. Если в плоскости вращения НВ действует поток со скоростью Vo=Vсosaн (поступательный, полет, висение с ветром), картина обтекания НВ будет иная. Каждый элемент находится под воздействием так называемого эффективного потока.
по ометаемой площади Косое обтекание НВ. Если в плоскости вращения НВ действует поток со скоростью Vo=Vсosaн (поступательный, полет, висение с ветром), картина обтекания НВ будет иная. Каждый элемент находится под воздействием так называемого эффективного потока.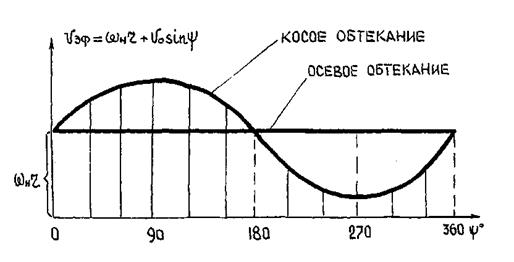

 =0,7.
=0,7.



 относительно КПВ, так как равнодействующая сила НВ
относительно КПВ, так как равнодействующая сила НВ  в ту же сторону.
в ту же сторону.