Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Синтез циклических систем управленияСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте Цель работы: Изучение метода синтеза логических последовательностей по тактограмме, реализации логических функций на релейных элементах, логическом контроллере и экспериментальная проверка схемы управления. Общие положения Автоматизированные и автоматические системы управления агрегатами и технологическими процессами, построенные на основе управляющих логических устройств называют системами логического типа. Действие автоматических устройств логического типа можно описать функциональными зависимостями между входными и выходными сигналами, т.е. логическими последовательностями. К таким системам управления относят ЦСПУ-цикловые системы программного управления. Функциональная задача такой системы управления сводится к обработке программно-заданного цикла работы основных и вспомогательных узлов станка на основе информации о величине, направлениях и скорости перемещений, задаваемых программой обработки изделия и датчиками, входящими в состав электрооборудования станка. Реализация функций управления узлами и механизмами станка на основе заданного цикла и информационных сигналов осуществляется в блоке электроавтоматики, в котором предусматривается возможность реализации «самопитания», «памяти» и размножения сигналов.
БЗП-блок задания программы. БПВП-блок поэтапного ввода программы. БЭА - блок электроавтоматики. ИМ - исполнительные механизмы. Д-датчик. Рис.7.1. Структурная схема устройств ЦСПУ
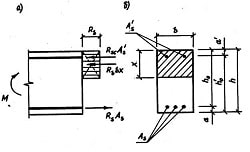
В течение многих лет для построения блоков электроавтоматически использовали релейно-контактные элементы, имеющие невысокую надежность, малое быстродействие, являющиеся сложными в обслуживании и наладке. В настоящий момент элементной базой БЭА являются интегральные схемы (ИС) малой и большой степени интеграции (БИС) и дискретные полупроводниковые элементы, способные реализовать логические функции любой сложности. На вход БЭА поступает набор сигналов с БПВП и датчиков положения, скорости, ускорения и т.п. На выходе БЭА формируются сигналы, которые по соответствующим каналам управляют исполнительными механизмами. Основной задачей синтеза ЦСПУ является разработка структур БЭА, составление логических выражений для срабатывания каждого исполнительного механизма и на их основе системы управления, обеспечивающей заданную программу работы исполнительных механизмов. Достаточно широко разработаны методы синтеза логических выражений по таблицам состояния, циклограммам, графам, тактограммам. Тактограммо-графическое изображение работы исполнительных механизмов, такт-промежуток времени, в течение которого ни один механизм не меняет свое состояние. Движение (работа) исполнительного механизма обозначается на тактограмме наклонной линией, высота - горизонтальной. Для составления логических функций срабатывания механизмов входным сигналам (получаемым с датчиков положения) присваивают «веса». Вес n-ого сигнала равен 2n. Введение «весов» позволяет различать входные наборы. Если суммарные «веса» в начале такта одинаковые, то одинаковые и входные наборы. При одинаковых входных наборах в различных тактах необходимо вводить дополнительный сигнал с элементами «памяти» «Память» включают таким образом, чтобы такты с одинаковыми весами имели разный уровень «памяти» (Z и На рис.7.2 представлена схема лабораторной установки.
Рис. 7.2 Схема лабораторной установки
Исполнительный механизм М1 перемещает инструменты в горизонтальном направлении от одного микропереключателя ДП1 до другого ДП2. Механизм М2 поворачивает рабочий стол на угол 180°, который фиксируется бесконтактными датчиками положения ДП3 - ДП4. Тактограмма работы этих механизмов представлена на рис.7.3. На ней введены: столбец с весами сигналов и строки с суммарным весом сигналов в начале тактов и входными сигналами. Входным считается сигнал, появляющийся в начале такта или в конце предыдущего. Из тактограммы видно, что сигнал
Рис. 7.3 Тактограмма работы механизмов
Рис. 7.4 Схема функций управления двигателей
Правила записи функций срабатывания механизмов по тактограмме. 1.Введем строки, в которых будем записывать функции включения механизмов (9, 7, 8) и памяти (10, 11). 2. В формулу функции включения механизма рассматриваемого такта записывается входной сигнал и должно выполняться соотношение Т( 3.Если указанное соотношение не наблюдается, то формулу включения дополняют сигналами памяти, так чтобы выполнялось соотношение Т( 4.Функции срабатывания механизмов записываются в следующем виде 5.Для элемента памяти функция срабатывания записывается так:
В соответствии с этими правилами в строки 7, 8, 9, 10, 11 записываем наборы сигналов для включения механизмов и элементов памяти. На основании этих наборов запишем функции срабатывания механизмов и элементов памяти:
В соответствии с полученными логическими выражениями составим релейно-контактную схему. Т. к. сигналы с датчиков используются в схеме по несколько раз их необходимо размножить через промежуточные реле. В схему необходимо ввести блокировки для защиты от короткого замыкания в схеме реверса механизма МI, устройства сигнализации и кнопочное управление. Бесконтактные датчики ДП3-ДП4 питаются от источника постоянного тока, поэтому часть схемы собрана на аппаратуре постоянного тока, а часть - на аппаратах переменного тока – схема реверса для механизма МI. Схема управления, собранная в соответствии с полученными логическими выражениями и имеющейся аппаратурой, представлена на рис. 7.5. Порядок выполнения работы 1. Ознакомиться с лабораторной установкой и собрать схему. 2. Включить источник постоянного тока (18В), проверить работу бесконтактных выключателей. 3. Подать питание в схему и проверить выполнение цикла, данного тактограммой. 4. Записать логические выражения срабатывания механизмов для заданной преподавателем тактограммы. Цепи управления
Силовые цепи
Рис. 7.4 Схема управления лабораторной установки В схеме SQ1 и SQ2 –микропереключатели. SB1 –кнопка «Пуск». SQ3 и SQ4 бесконтактные датчики.
Содержание отчета Цель работы. Перечень аппаратуры, используемой в работе. Циклограмма работы двигателей. Лабораторная схема. Описание работы схемы. Циклограмма работы двигателей в соответствии с заданием преподавателя. Разработанная схема. Описание работы схемы.
7.3. Контрольные вопросы 1. Описание работы схемы исходной и измененной. 2. Область применения ЦСПУ. 3. Виды датчиков положения исполнительных механизмов, принцип действия. 4. Назвать и дать краткую характеристику принципов управления многодвигательными системами.
Лабораторная работа № 8
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-09-13; просмотров: 783; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.214 (0.01 с.) |

 ). При реализации схемы на релейно-контактной аппаратуре необходимо запомнить и импульсные сигналы (с нулевой длительностью).
). При реализации схемы на релейно-контактной аппаратуре необходимо запомнить и импульсные сигналы (с нулевой длительностью).
 -является импульсным, а в I и III тактах одинаковые суммарные веса, т.е. необходимо вводить «память». Введем два элемента «памяти», один включим в начале I такта и в начале II выключим. Это позволит запомнить импульсный сигнал
-является импульсным, а в I и III тактах одинаковые суммарные веса, т.е. необходимо вводить «память». Введем два элемента «памяти», один включим в начале I такта и в начале II выключим. Это позволит запомнить импульсный сигнал  M1
M1
 2
2

 4
4
 8
8


 Z1
Z1




 6
6








 )ÎТ(
)ÎТ( ).
). )ÎТ(
)ÎТ( , где
, где  - сигнал с датчика положения, ограничивающего перемещение в этом направлении,
- сигнал с датчика положения, ограничивающего перемещение в этом направлении,  - функция включения механизма в такте.
- функция включения механизма в такте. , где
, где  - функция включения памяти,
- функция включения памяти,  - функция выключения памяти.
- функция выключения памяти. ;
; 
 ;
; 
 .
.