
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Наезд На неподвижное препятствие: определение скорости ТС перед наездом по величине деформации передней части и по расстоянию отката.
Наезд автомобиля на неподвижное абсолютно жесткое препятствие может сопровождаться центральным или внецентренным ударом. До наезда на препятствие автом. может двигаться равномерно или замедленно. Если появление препятствия в поле зрения водителя было неожиданным вследствие плохой видимости или если водитель не мог (не сумел) своевременно затормозить, то скорости автомобиля остается примерно неизменной до момента наезда. Возможны также случаи, когда водитель успевает отреагировать на появление препятствия и нажать на тормозную педаль. Однако ввиду высокой скорости автомобиля, небольшого расстояния видимости или недостаточной эффективности тормозной системы скорость не удается погасить до нуля и автомобиль ударяется о препятствие в заторможенном состоянии. Если скорость автомобиля до удара была сравнительно невелика и повреждения его в результате наезда незначительны, то после наезда автомобиль откатывается от препятствия свободно. Если скорость была сравнительно большой, то при ударе возможно смещение двигателя и коробки передачи назад. Если в период, предшествовавший удару, водитель успел применить экстренное торможение, то после удара автомобиль может двигаться только «юзом», так как за весьма короткое время тормозная система не может разблокировать колеса, даже если нога водителя соскользнет с педали. Это вызывает заклинивание карданной передачи, вследствие чего блокируются задние колеса. К передним колесам после наезда на препятствие обычно прижаты смятые крылья, брызговики, бампер и другие детали, поэтому передние колеса также утрачивают возможность вращаться. В результате автомобиль, двигавшийся до наезда с большой скоростью, перемещается назад, как правило, с блокированными колесами. Процесс наезда на неподвижное препятствие показан на рис. В начальный момент контакта с препятствием (а) общая длина автомобиля LА. В результате смятия передней части автомобиль сближается с препятствием, двигаясь замедленно. В момент остановки деформация достигает максимума и составляет
Примерная последовательность расчета по деформации: 1. Остаточная деформация передней части автомобиля 2. Полная деформация передней части 3. Упругая деформация передней части 4. Скорость автомобиля в момент его отделения от препятствия υН’ 5. Начальная скорость автомобиля, если водитель перед наездом не тормозил, Если водитель применил торможение и на покрытии оставлены следы длиной Sю, то
На рисунке в координатах «путь—время» показан процесс сближения двух автомобилей 1 и 2. Римскими цифрами отмечены: / — в момент, когда водители могли оценить сложившуюся дорожную обстановку как опасную и должны были принять необходимые меры для ее ликвидации, // — в моменты, когда каждый из водителей в действительности начал реагировать на возникшую опасность, /// — в моменты, соответствующие началу образования следов, юза на покрытии (начало полного торможения), IV— в момент столкновения автомобилей. Цифрами V отмечены положения автомобилей, в которых они остановились бы, если бы не столкнулись, а продолжали двигаться в заторможенном состоянии (предположительная версия). Расстояние между автомобилями в момент возникновения опасной обстановки Sв. Участок //—/// соответствует движению автомобилей с постоянными скоростями за суммарное время Т1 (Т2). Расстояния Sa1 и Sa2, отделявшие автомобили от места столкновения в начальный момент, должны быть определены следственным путем, так же, как их начальные скорости Va1 и Va2. Очевидное условие возможности предотвратить столкновение: расстояние видимости должно быть не меньше суммы остановочных путей обоих транспортных средств: Sв=Sа1+ Sа2
Главная цель экспертного анализа в этом случае обычно заключается в ответе на вопрос: «Имел ли водитель в данной дорожной обстановке техническую возможность избежать наезда на пешехода путем применения экстренного маневра?». Вначале рассмотрим использование маневра для объезда неподвижного препятствия.
Для успешного выполнения маневра, прежде всего, необходима достаточная ширина проезжей части. Динамический коридор, занимаемый движущимся автомобилем, больше его габаритной ширины вследствие поперечных колебаний кузова. Однако автомобиль при движении испытывает не только поперечные, но и угловые отклонения в горизонтальной плоскости. Поэтому на показатель Вдк влияет не только ширина, но и длина автомобиля. С каждой стороны автомобиля должен быть обеспечен безопасный интервал, исключающий контакт движущегося автомобиля с пешеходом в процессе объезда. Чтобы найти условия безопасного объезда неподвижного препятствия, определим положение передних габаритных точек автомобиля — правого (П) и левого (Л) его углов.
Методика: 1. Зазор безопасности.
3. Продольное перемещение автомобиля, возможное в данной дорожной обстановке 4. Поперечное смещение автомобиля, максимально возможное при передвижении его на расстояние хф, 5. Курсовой угол в конце маневра 6. Условие возможности выполнения маневра
При малых значениях γм ум
|
|||||||
|
|
Последнее изменение этой страницы: 2016-07-14; просмотров: 756; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.144.187.103 (0.009 с.) |
 1 (б). Затем детали, сжатые при ударе, частично распрямляются под действием сил упругости, и автомобиль начинает двигаться ускоренно в обратном направлении. В момент отделения от препятствия длина автомобиля L'А (в). После отделения от препятствия автомобиль, двигаясь замедленно, откатывается на расстояние Sпн (г). Коэффициентом упругости автомобиля называют отношение максимальной деформации и остаточной: Купр=
1 (б). Затем детали, сжатые при ударе, частично распрямляются под действием сил упругости, и автомобиль начинает двигаться ускоренно в обратном направлении. В момент отделения от препятствия длина автомобиля L'А (в). После отделения от препятствия автомобиль, двигаясь замедленно, откатывается на расстояние Sпн (г). Коэффициентом упругости автомобиля называют отношение максимальной деформации и остаточной: Купр= 
 (Куд - коэффициент восстановления –справочные данные).
(Куд - коэффициент восстановления –справочные данные). (jот – замедление отскока, м/с2). При известной длине пути отката Sпн расчеты более просты.: 1. Скорость автомобиля в момент его отделения от препятствия U'а=
(jот – замедление отскока, м/с2). При известной длине пути отката Sпн расчеты более просты.: 1. Скорость автомобиля в момент его отделения от препятствия U'а=  .2. Начальная скорость автомобиля при наезде без торможения
.2. Начальная скорость автомобиля при наезде без торможения  ; при наезде с торможением
; при наезде с торможением 
 15. Столкновение двух автом.
15. Столкновение двух автом. Sо1+Sо2, где индексы 1 и 2 относятся к соответствующим автомобилям. Для реализации этого условия водители должны одновременно реагировать на возникшую опасность для движения и без промедления начать экстренное торможение. Обычно водители некоторое время продолжают сближаться, не снижая скорости, и тормозят со значительным опозданием, когда столкновение невозможно предотвратить. Особенно часты такие ДТП в ночное время, когда один из водителей выезжает на левую сторону дороги, а недостаточная освещенность затрудняет определение расстояний и распознавание транспортных средств. Для установления причинной связи между действиями водителей и наступившими последствиями нужно ответить на вопрос: имел ли каждый из водителей техническую возможность предотвратить столкновение, несмотря на неправильные действия другого водителя? Примерная последовательность расчета при оценке действий водителя автомобиля 1:1) Скорость второго автомобиля в момент начала полного торможения
Sо1+Sо2, где индексы 1 и 2 относятся к соответствующим автомобилям. Для реализации этого условия водители должны одновременно реагировать на возникшую опасность для движения и без промедления начать экстренное торможение. Обычно водители некоторое время продолжают сближаться, не снижая скорости, и тормозят со значительным опозданием, когда столкновение невозможно предотвратить. Особенно часты такие ДТП в ночное время, когда один из водителей выезжает на левую сторону дороги, а недостаточная освещенность затрудняет определение расстояний и распознавание транспортных средств. Для установления причинной связи между действиями водителей и наступившими последствиями нужно ответить на вопрос: имел ли каждый из водителей техническую возможность предотвратить столкновение, несмотря на неправильные действия другого водителя? Примерная последовательность расчета при оценке действий водителя автомобиля 1:1) Скорость второго автомобиля в момент начала полного торможения  (t''3 — время нарастания замедления автомобиля 2; j" — установившееся замедление того же автомобиля). 2) Путь полного торможения второго автомобиля S'4=U2ю2/(2j''). 3) Расстояние, на которое переместился бы второй автомобиль до остановки от места наезда, если бы не произошло столкновения,
(t''3 — время нарастания замедления автомобиля 2; j" — установившееся замедление того же автомобиля). 2) Путь полного торможения второго автомобиля S'4=U2ю2/(2j''). 3) Расстояние, на которое переместился бы второй автомобиль до остановки от места наезда, если бы не произошло столкновения,  (Sю2 — длина следа юза, оставленного на покрытии вторым автомобилем перед местом столкновения). 4) Остановочный путь первого автомобиля So 1 = T'Vа1.+ V2a1/(2j'). 5) Условие возможности для водителя первого автомобиля предотвратить столкновение, несмотря на несвоевременное торможение второго водителя: Sa1
(Sю2 — длина следа юза, оставленного на покрытии вторым автомобилем перед местом столкновения). 4) Остановочный путь первого автомобиля So 1 = T'Vа1.+ V2a1/(2j'). 5) Условие возможности для водителя первого автомобиля предотвратить столкновение, несмотря на несвоевременное торможение второго водителя: Sa1  16. Расчет маневра ТС при анализе ДТП.
16. Расчет маневра ТС при анализе ДТП.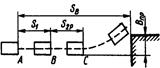 В числе исходных данных, предоставляемых эксперту, должны быть указаны ширина Bпр препятствия, которое необходимо объехать, и расстояние до него в момент возможного обнаружения его водителем — расстояние конкретной видимости Sв Если исследуют возможность применения маневров «вход в поворот» и «вход — выход», то нужно знать также курсовой угол, под которым автомобиль может по дорожным условиям двигаться к прежнему направлению движения по окончании маневра.
В числе исходных данных, предоставляемых эксперту, должны быть указаны ширина Bпр препятствия, которое необходимо объехать, и расстояние до него в момент возможного обнаружения его водителем — расстояние конкретной видимости Sв Если исследуют возможность применения маневров «вход в поворот» и «вход — выход», то нужно знать также курсовой угол, под которым автомобиль может по дорожным условиям двигаться к прежнему направлению движения по окончании маневра.
 2. Коэффициент маневра.
2. Коэффициент маневра. 
 Если угол γм мал, то xф=Sв— S1—S2p. (S1=vat1 - пути пройденный за время реакции водителя t1 – 0,8с; S2p=vat2p – путь пройденный за время запаздывания рулевого управления. t2p - для легк. 0,2-0,4с, груз. 0,6-0,8с)
Если угол γм мал, то xф=Sв— S1—S2p. (S1=vat1 - пути пройденный за время реакции водителя t1 – 0,8с; S2p=vat2p – путь пройденный за время запаздывания рулевого управления. t2p - для легк. 0,2-0,4с, груз. 0,6-0,8с)





