Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Институт судостроения и морской арктической техникиСодержание книги
Поиск на нашем сайте
Институт судостроения и морской арктической техники
Чурносов А.И.
Автоматизированный электропривод
Пособие и методические указания к выполнению контрольной работы для студентов очной формы обучения специальности 220201
Северодвинск 2013 г. Введение. 3 1.Классификация автоматизированного электропривода. 4 2.Определение моментов инерции. 6 3.Силы и моменты, действующие. 12 в системе электропривода. 12 4.Электромеханические свойства. 15 двигателей постоянного тока. 15 5.Электромеханические свойства. 20 двигателей переменного тока. 20 6. Режимы работы электродвигателей. 24 6.1 Длительный режим. 24 6.2 Кратковременный режим. 24 6.3 Повторно-кратковременный режим. 24 7. Нагрев и охлаждение электродвигателей. 25 7.1 Нагрев двигателя. 25 7.2 Охлаждение двигателя. 26 8. Выбор электродвигателя. 27 9. Порядок выбора электроприводов. 30 10. Расчет электропривода судового механизма. 31 11. Выбор кабеля от распределительного щита (РЩ). 41 до электродвигателя. 41 12. Выбор коммутационной аппаратуры.. 43 13. Управление режимами электропривода. 44 Литература. 46 Приложение А.. 47 Приложение Б.. 48 Приложение В.. 49 Приложение Г.. 50 Приложение Д.. 51 Приложение Е.. 52 Приложение Ж... 53 Приложение И.. 54
Введение
Данное пособие по судовому электроприводу предназначено для закрепления теоретического материала студентами специальности «Системы электроэнергетики и автоматизации судов». Для лучшего усвоения материала и приобретения инженерных навыков приведены примеры задач и их решения. Кроме того, дано развернутое описание выбора электропривода для грузоподъемного механизма, по заданному режиму работы, произведена проверка на тепловой режим, выбор кабеля, коммутационной аппаратуры, принципиальная схема режимов работы электропривода.
Основные единицы измерения. L –длина (м) M – масса (кг) t – время (сек) F – сила (H) U – скорость поступательного движения (м/с) w – ускорение (м/с2) E – угловое ускорение (рад/сек2) M – момент (H/м) A – работа, энергия (Дж) P – Мощность (Вт) J – момент инерции (кг м2) GD2 – маховый момент (кг м2) Силы и моменты, действующие В системе электропривода.
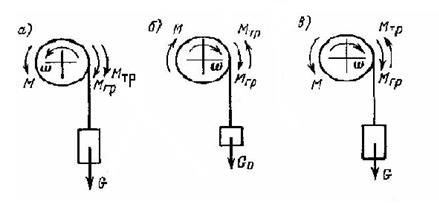
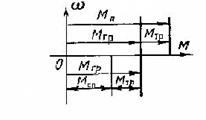
С оотношение статических моментов, преодолеваемых двигателем лебедки при подъеме и спуске одного и того же груза (рис.3.1а).
Решение:
Рисунок 3.1(а) – Взаимодействие моментов, действующих на вал.
Рисунок 3.1(б) – Абсолютное значение статического момента: при подъеме груза Мпод = Мгр + Мтр; при спуске груза Мсп = Мгр - Мтр.
Вычтя из первого уравнения второе, получим (рисунке 3.1.б)
Мпод-Мсп=2Мтр; Мсп=Мпод-2Мтр.
Это соотношение моментов справедливо при расчете грузоподъемных механизмов электроприводов. Задача 3.2. Определить статические моменты на валу двигателя грузовой трехтонной лебедки при подъеме и спуске номинального груза и холостого гака, если масса холостого гака m0=60кг; диаметр грузового барабана Dб=400мм; передаточное отношение редуктора i=23,3; КПД механизма при подъеме номинального груза η=0,8. Решение: 1.Загрузка механизма при подъеме холостого гака Fx/Fн=m0/mн=60/3000=0,02 соответствует КПД (рисунок 3.2) η0=0,15. 2. Статические моменты (на валу двигателя): при подъеме номинального груза
при спуске номинального груза
при подъеме холостого гака
при спуске холостого гака
Рисунок 3.2. – Зависимость КПД зубчатых передач η от загрузки механизма
Задача 3.3. Определить время, за которое двигатель лебедки (данные смотри в задаче 3.1.) под действием неизменного пускового момента Мп=450 Н∙м разгонится при подъеме и спуске номинального груза до скорости ωст=97 рад/с и остановится после отключения от сети и наложения тормоза с Мт=2Мст2. Момент инерции двигателя Jдв=1,9 кг∙м². Инерционность передачи и грузового барабана учитываем введением коэффициента k=1,2. Скорость подъема и спуска груза υ=50 м/мин. (В реальных условиях эти скорости определяют из механической характеристики двигателя в соответствии с Мст.).
Решение: Приведенный момент инерции электромеханической системы
Время пуска двигателя на подъем груза
Время торможения при подъеме груза
Время пуска двигателя на спуск груза
Время торможения при спуске груза
Электромеханические свойства Электромеханические свойства Длительный режим. Это режим, при котором двигатель работает под нагрузкой в течение времени, достаточного для нагрева его до установившейся температуры (рис.1а). Установившаяся температура определяется нагрузкой двигателя. Двигатель используется полностью, если установившаяся температура равна максимально допустимой для класса изоляции двигателя Кратковременный режим. В этом режиме двигатель, работая под нагрузкой не успевает нагреться до установившейся температуры, а в период остановки остывает до температуры окружающей среды (рис.1б). Работать двигатель всегда начинает в холодном состоянии
Нагрев двигателя.
Работая с некоторой постоянной мощностью на валу
Потери мощности в двигателе превращаются в теплоту, вызывая нагрев до некоторой температуры, определяемую его нагрузкой. Количество теплоты
При расчёте тепловых процессов принимают следующие допущения: - двигатель представляют в виде однородного твёрдого тела, равномерно нагревающегося по всему объёму; - считают, что двигатель охлаждается только благодаря теплопроводности и конвекции. При этих условиях количество теплоты, выделяемой двигателем в окружающую среду, пропорционально повышению
Введём обозначения: С – теплоёмкость двигателя – количество теплоты, необходимое для нагревания двигателя на 1oС,
где
Решив дифференциальное уравнение относительно
где
Исходя из реальных условий нагрева двигателя, постоянную нагрева Т определяют как время, в течение которого нагревается до
Для двигателей малой и средней мощности постоянная времени нагрева находится в пределах 10-20 мин.
Охлаждение двигателя. После отключения двигателя от сети выделение теплоты в нём сокращается:
Используя уравнение нагрева двигателя [1], получим уравнение охлаждение двигателя:
где Если за время работы двигатель нагрелся до За время
На практике можно считать полностью остывшим, если его температура не более чем на Выбор электродвигателя Длительный режим работы. Двигатели, работающие в длительном режиме, могут иметь неизменную или циклически меняющуюся во времени нагрузку, что определяет тепловые процессы в двигателе и методику выбора его мощности. При неизменной нагрузке выбор двигателя довольно прост и заключается в определении потребляемой исполнительным механизмом мощности
где Далее, по каталогу выбирают двигатель нужных параметров (скорость, напряжение и др.) и конструктивного исполнения с номинальной мощностью При циклически меняющейся нагрузке, с какой работает большинство электрифицированных механизмов, мощность электродвигателя рассчитывают на основе нагрузочной диаграммы исполнительного механизма по среднему статическому моменту.
Зная среднее значение статического момента, определяют расчётный момент выбираемого двигателя:
где Проверка мощности на нагрев производится по методу эквивалентного момента:
или по методу эквивалентной мощности:
Выбранный двигатель не будет перегреваться, если
Предварительный выбор двигателя.
Момент на валу электродвигателя при подъёме номинального груза:
Момент на валу электродвигателя при опускании номинального груза в режиме тормозного спуска:
Скорость электродвигателя (на быстроходной обмотке), необходимая для обеспечения заданной скорости подъёма номинального груза:
или частота вращения:
Скорость электродвигателя, необходимая для обеспечения опускания груза:
или частота вращения:
Мощность электродвигателя при подъёме номинального груза на быстроходной обмотке:
Мощность электродвигателя при опускании груза на обмотке средней скорости:
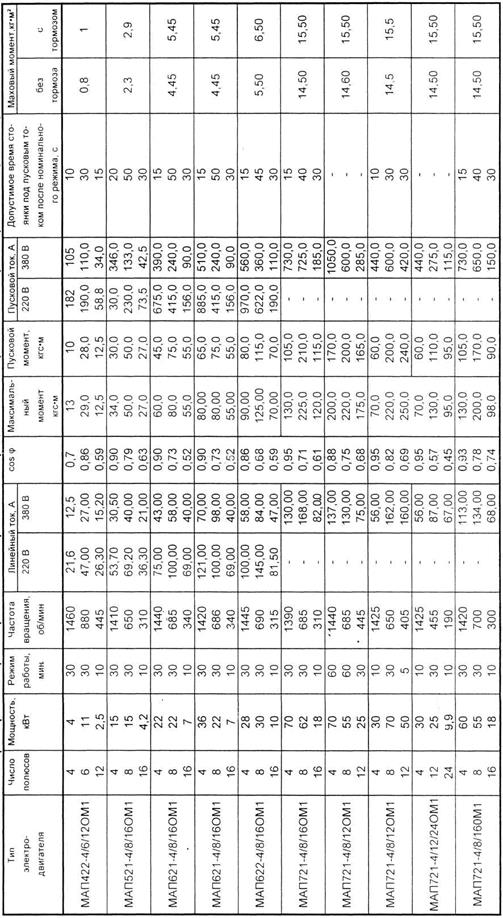
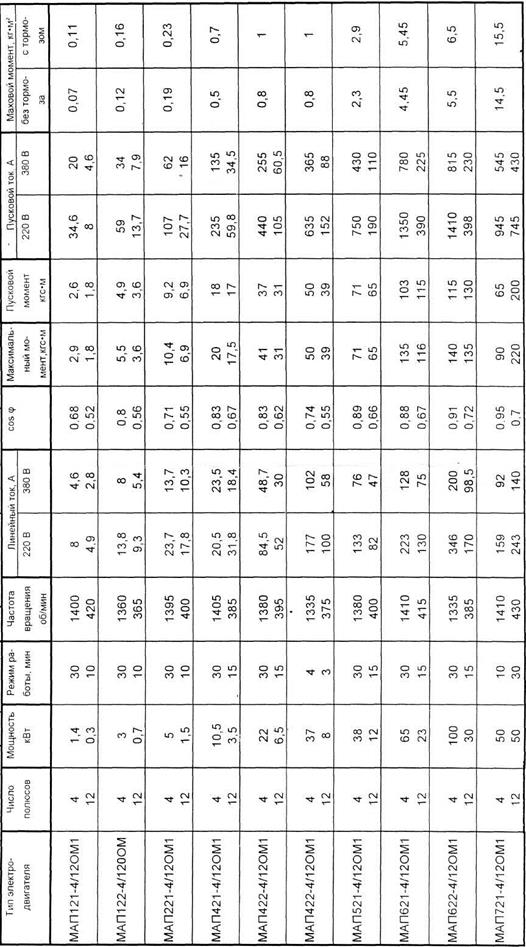
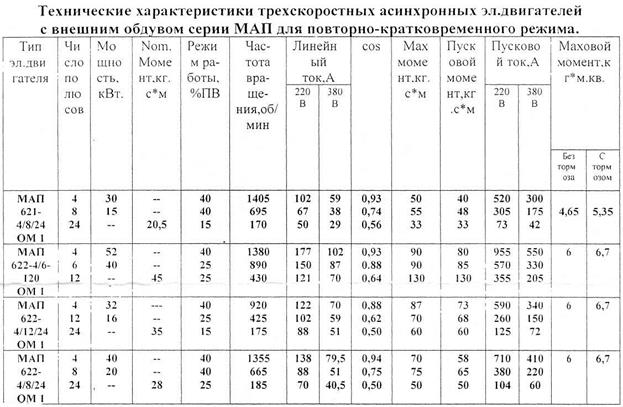
В качестве электродвигателя выбираем судовой трёх скоростной асинхронный электродвигатель для якорно-швартовных механизмов серии МАП 622-4/8/16 ОМ1 с параметрами:
Определяем номинальный момент двигателя на быстроходной обмотке:
Определяем номинальный момент двигателя на тихоходной обмотке:
Таким образом, работая с Б.) Для тихоходной обмотки. · точка идеального холостого хода для тихоходной обмотки:
где · точка номинального режима · точка, соответствующая критическому моменту где
· точка пуска Дополнительные точки определяются по формуле Клосса:
промежуточные точки при скольжении, равном
характерные точки режима для тихоходной обмотки: точка холостого хода точка номинального режима точка критического момента точка пускового момента промежуточная точка1 промежуточная точка2
На рисунке приведены характеристики двигателя МАП-622-4/8/12 ОМ1
До электродвигателя
При выборе питающего кабеля исходят из расчёта величины эквивалентного тока, вида прокладки, температуры окружающей среды и т.д. Величина расчётного тока кабеля
где Коэффициент
где Если Ниже приведена таблица загрузки некоторых судовых кабелей.
Таблица 1
Выбираем 3-х жильный кабель сечением жилы 25 мм2, на ток 79 А.
В трёхфазной системе для вычисления потери напряжения
где
Ниже приведены величины активных и реактивных сопротивлений одной жилы кабеля при температуре 65оС и частоте сети 50 Гц, для 1000 метров кабеля.
Таблица 2
Обычно потеря напряжения выражается в процентах от номинального напряжения:
Допустимые потери для сетей освещения – 5%, сетевых потребителей кратковременного режима работы – 16%. Литература
1. Чекунов К.А. Судовые электроприводы и электродвижение судов. - Л., Судостроение, 1986. 2. Есаков В.П., Торопов В.И. Сборник задач по теории электропривода. /Под редакцией Миллера Е.В./.- М., Высшая школа, 1969. 3. Зимин Е.Н., Яковлев В.И. Автоматическое управление электроприводами. – М., Высшая школа, 1979.
Приложение А
Приложение Б
Приложение В
Приложение Г
Приложение Д
Приложение Е
Приложение Ж
Институт судостроения и морской арктической техники
Чурносов А.И.
Автоматизированный электропривод
Пособие и методические указания к выполнению контрольной работы для студентов очной формы обучения специальности 220201
Северодвинск 2013 г. Введение. 3 1.Классификация автоматизированного электропривода. 4 2.Определение моментов инерции. 6 3.Силы и моменты, действующие. 12 в системе электропривода. 12 4.Электромеханические свойства. 15 двигателей постоянного тока. 15 5.Электромеханические свойства. 20 двигателей переменного тока. 20 6. Режимы работы электродвигателей. 24 6.1 Длительный режим. 24 6.2 Кратковременный режим. 24 6.3 Повторно-кратковременный режим. 24 7. Нагрев и охлаждение электродвигателей. 25 7.1 Нагрев двигателя. 25 7.2 Охлаждение двигателя. 26 8. Выбор электродвигателя. 27 9. Порядок выбора электроприводов. 30 10. Расчет электропривода судового механизма. 31 11. Выбор кабеля от распределительного щита (РЩ). 41 до электродвигателя. 41 12. Выбор коммутационной аппаратуры.. 43 13. Управление режимами электропривода. 44 Литература. 46 Приложение А.. 47 Приложение Б.. 48 Приложение В.. 49 Приложение Г.. 50 Приложение Д.. 51 Приложение Е.. 52 Приложение Ж... 53 Приложение И.. 54
Введение
Данное пособие по судовому электроприводу предназначено для закрепления теоретического материала студентами специальности «Системы электроэнергетики и автоматизации судов». Для лучшего усвоения материала и приобретения инженерных навыков приведены примеры задач и их решения. Кроме того, дано развернутое описание выбора электропривода для грузоподъемного механизма, по заданному режиму работы, произведена проверка на тепловой режим, выбор кабеля, коммутационной аппаратуры, принципиальная схема режимов работы электропривода.
Основные единицы измерения. L –длина (м) M – масса (кг) t – время (сек) F – сила (H) U – скорость поступательного движения (м/с) w – ускорение (м/с2) E – угловое ускорение (рад/сек2) M – момент (H/м) A – работа, энергия (Дж) P – Мощность (Вт) J – момент инерции (кг м2) GD2 – маховый момент (кг м2)
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-06-19; просмотров: 457; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.135.205.231 (0.01 с.) |











 . В длительном режиме на судах работают электроприводы вентиляторов, насосов и других механизмов.
. В длительном режиме на судах работают электроприводы вентиляторов, насосов и других механизмов. . В таком режиме на судах работают электроприводы якорно-швартовых устройств. Завод-изготовитель двигателей указывает номинальные мощности двигателя для стандартных длительностей работы – 10, 30 и 60 мин.
. В таком режиме на судах работают электроприводы якорно-швартовых устройств. Завод-изготовитель двигателей указывает номинальные мощности двигателя для стандартных длительностей работы – 10, 30 и 60 мин. , двигатель потребляет из сети мощность
, двигатель потребляет из сети мощность  , превышающую мощность
, превышающую мощность  , которые выражают через к.п.д. двигателя
, которые выражают через к.п.д. двигателя  :
:
 , выделяемое в двигателе:
, выделяемое в двигателе:
 его температуры
его температуры  над температурой окружающей среды
над температурой окружающей среды  .
.
 ; А – теплоотдача двигателя – количество теплоты, отдаваемое в окружающую среду в течение 1с при разности температур двигателя и среды 1oС,
; А – теплоотдача двигателя – количество теплоты, отдаваемое в окружающую среду в течение 1с при разности температур двигателя и среды 1oС,  ,
, - количество теплоты, выделяющейся в двигателе за время dt;
- количество теплоты, выделяющейся в двигателе за время dt; - количество теплоты, идущей на нагрев двигателя;
- количество теплоты, идущей на нагрев двигателя; - количество теплоты, отдаваемой двигателем в окружающую среду за время dt.
- количество теплоты, отдаваемой двигателем в окружающую среду за время dt. [1]
[1] - постоянная времени нагрева,
- постоянная времени нагрева,  ;
; - установившееся превышение температуры, которое будет достигнуто за время
- установившееся превышение температуры, которое будет достигнуто за время  . В реальных условиях через
. В реальных условиях через  двигатель достигает температуры
двигатель достигает температуры  .
. . Действительно:
. Действительно:
 . Тогда
. Тогда  , т.е. двигатель охлаждается до температуры окружающей среды
, т.е. двигатель охлаждается до температуры окружающей среды  . При этом двигатель останавливается, и теплоотдача
. При этом двигатель останавливается, и теплоотдача  в большинстве случаев ухудшается
в большинстве случаев ухудшается  , а постоянная времени охлаждения
, а постоянная времени охлаждения  становится больше
становится больше  . Для самовентилируемых двигателей
. Для самовентилируемых двигателей  ; для двигателей с независимым охлаждением можно принять
; для двигателей с независимым охлаждением можно принять  .
. ,
, - превышение температуры двигателя в момент отключения его от сети.
- превышение температуры двигателя в момент отключения его от сети. , т.е.
, т.е.  , то после отключения то сети он будет охлаждаться по экспоненциальной кривой.
, то после отключения то сети он будет охлаждаться по экспоненциальной кривой. двигатель охлаждается до температуры, соответствующей превышению:
двигатель охлаждается до температуры, соответствующей превышению:
 отличается от температуры окружающей среды. Такого состояния двигатель достигает за время
отличается от температуры окружающей среды. Такого состояния двигатель достигает за время  .
. , по которой находят расчётную мощность электродвигателя:
, по которой находят расчётную мощность электродвигателя: ,
, - к.п.д. передачи от двигателя к рабочему органу механизма.
- к.п.д. передачи от двигателя к рабочему органу механизма. . Выбранный таким образом двигатель будет удовлетворять всем требованиям со стороны исполнительного механизма и в дополнительной проверке не нуждается.
. Выбранный таким образом двигатель будет удовлетворять всем требованиям со стороны исполнительного механизма и в дополнительной проверке не нуждается.
 ,
, - коэффициент, учитывающий необходимость преодоления двигателем динамических нагрузок: увеличивается с увеличением колебаний нагрузки и числа включений двигателя в час.
- коэффициент, учитывающий необходимость преодоления двигателем динамических нагрузок: увеличивается с увеличением колебаний нагрузки и числа включений двигателя в час.
 или
или  .
.



















 и
и  двигатель не перегружается.
двигатель не перегружается.
 ,
, - частота сети,
- частота сети,  - число пар полюсов;
- число пар полюсов; ;
; ;
; - кратность максимального момента,
- кратность максимального момента,  , причём критическое скольжение
, причём критическое скольжение  определяется по выражению:
определяется по выражению:



 - кратность пускового момента.
- кратность пускового момента.
 и
и  :
:














 определяется по формуле:
определяется по формуле:
 - эквивалентный ток, определённый в п.5;
- эквивалентный ток, определённый в п.5;  - коэффициент, учитывающий уменьшение допустимой нагрузки кабеля находящегося в пучке; для однорядных пучков -
- коэффициент, учитывающий уменьшение допустимой нагрузки кабеля находящегося в пучке; для однорядных пучков -  ,
,  - коэффициент, учитывающий число часов работы в сутки, к2 =1,41.
- коэффициент, учитывающий число часов работы в сутки, к2 =1,41.
 - суммарное время работы кабеля под нагрузкой за сутки.
- суммарное время работы кабеля под нагрузкой за сутки. , то принимают
, то принимают  и выбор кабеля производят по таблицам.
и выбор кабеля производят по таблицам. определяют:
определяют: