
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
История развития и современное состояние автоматикиСтр 1 из 12Следующая ⇒
История развития и современное состояние автоматики Автоматика - от греческого слова автоматос – самодвижущийся. Первые сведения об автоматических устройствах появились во 2 в. н. э. в трудах гр. ученого Герона Александрийского, где описывались автоматы по открытию дверей храма, дозировки святой воды. Промышленное внедрение автоматики связано с промышленным переворотом в Европе(регулятор уровня воды, регулятор скорости паровой машины. Основные этапы развития автоматики: - появление автоматики связано с изобретением Яковлева электродвигателя постоянного тока, Шиллинга - электромагнитного реле, Дариио -Добровольского - асинхронного 3-х фазного двигателя - появление радиоэлектроники связано с открытием Яблочковым явления фотоэффекта и Поповым лампочки - появление ЭВМ в качестве основного устройства для вычислительной техники и управления технологическими процессами. Винер в 1946 г. Опубликовал книгу «Кибернетика или контроль связи у животных и машин. Найдена аналогия между процессами происходящими в мозгу человека и автоматического устройства. Методы кибернетики, которые включают теорию автоматического регулирования, математического моделирования процессов и явлений, применимы до настоящего времени. Современный этап состояния автоматизации в области химической технологии включает: -внедряются и эксплуатируются системы приборов, которые реализуют основные функции АС -широко внедряются процессорные контроллеры, которые реализуют функции преобразователя сигнала в цифровые коды, регулируют логическое управление, которое легко адаптируется к изменению процесса, т.к. является программируемым устройством. -разработка и внедрение автоматических систем управления технологическими процессами(АСУТП). Основой АСУТП является ЭВМ, которое осуществляет сбор информации, ее обработку по соответствующим параметрам.. Данная информация используется оператором для управления процессом, а также с помощью ЭВМ определяется оптимальный режим протекания химико-технологического процесса. Автоматизированный- это значит что в контуре есть оператор. В настоящее время внедряются такие АСУТП, где используются информационный, управляющий режим(первый является предпочтительным)
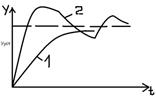
Датчики, основные показатели и характеристики. Датчик- устройство, осуществляющее функцию преобразования физической величины одного рода в физическую величину другого рода, удобную для передачи другим элементам и на усиление. Основные характеристики: 1. Статическая характеристика y=f(x)
1- линейная характеристика, поэтому чувствительность 2- нелинейная, поэтому чувствительность будет различной и зависит от крутизны данной характеристики Датчики, статическая характеристика которого непрерывна называются датчиками непрерывного действия или функциональными. Если статическая характеристика описывается следующей функцией
2. Динамическая характеристика- зависимость y от времени при скачкообразном изменении входной величины x. y=f(t) при x=const
1- экспонинциальные 2- колебательный затухающий процесс По виду выходной величины сигнала у датчики делятся на: - омические - термоэлектрические - емкостные - индуктивные - трансформаторные По измеряемым технологическим параметрам: - температуры - давления - расхода - уровня - плотности -влажности и т.д. Датчики температуры По принципу действия промышл. Приборы подразделяются на виды: - манометрические термометры – основаны на измении давления среды в замкнутом объеме при изменении температуры. - Термометры сопротивления – основаны на изменении сопротивления проводников и полупроводников при изменении температуры - Термопары – основаны на изменении термоЭДС при изменении температуры - Пирометры излучения – делятся на яростные (основаны на измерении яркости нагретого тела) радиоциоонные (основаны на изменении мощности излучения нагретого тела). Термопары Принцип действия основан на термоэлектрическом эффекте: при соединении 2-х разнородных проводников в замкнутую цепь (местот соединения называются спаями). При нагревании одного из спаев по данной цепи пртекает ток, вызванный термоЭДС.
Разные проводники содержат различное число электронов. При нагревании спая электродов электронов перетекают из того проводника, где их больше, туда, где их меньше. Схема термопары:
1,2 проводники (электроды) 1’, 2’ –соединения электродов (спаи) 1’ – горячий, помещается в контролируемую среду 2’ – холодный, подключен к прибору е1, е2 – ЭДС горячая и холодная спаи е=е1-е2 - ЭДС термопары ЭДС ТП зависит не только от разных t спаев, но и от их абсолютного значения. Оснавная характеристика – коэфф. Применяется t градуировки холодная спая 20 С. Оснавная погрешность показаний ТП связаная с отклонением температуры холод. спаев, которая присоединится ко 2-ому прибору, от данной температуры.
Применяется мостовая схема, имеется 4 плеча, в каждом из которых включены соответствующие сопротивления R1,R2 - -постоянного сопротивления, величины которых не зависят от t. Rt- термосопротивление, не зависящее от t. R3 – потенциометр Данный мост имеет 2 диагонали: 5-6 – питающая диагональ, включающая источник постоянного тока, 3-4 – измерительную диагональ Когда мост уравновешен, U измерительная диагональ U=0. Условие равновесия моста определяется следующим соотношением: равенство произведений сопротивлений противоположных плеч
При увеличении температуры холодных спаев. увеличение Rt приводит к разбалансированию моста. В измерительной диагонали возникает U. Параметры данного моста так, чтобы U, возникающее в измерении диагонали было равно изменению ЭДС холодных спаев и направлено навстречу ему, т.е. U34=
В качестве материалов электродов ТП применяют Pt, ее сплавы, сплавы др. металлов. Конструкция ТП изготавливают в виде проволоки, изолированную друг от друга кварцевыми или фосфорными трубочками и помещенную в защитно металлический кожух.
А) газовые – заполнены азотом под давлением 1-5 МПа, в зависимости от температуры изменяется давление газа в баллоне. Изменение давление выражено зависимостью
Недостатки 1) высокая инерционность связ.низким коэф.теплопередачи от металла корпуса баллона к газу находящемся в баллоне. 2)низкая теплоемкасть газа. 3)значительные размеры баллона (трудно вставить в трубки малого диаметра). Б) жидкостные заполнены кселолом. ртутью под давлением 1-2 МПа. Кселол Колебание атмосферного давления не вызывает погрешности из-за высокого Относительная погрешность 0,5 до 2,5%. Выпускают с электрическими и пневмотическими преобразователями. Датчики уровня жидкости Подразделяются на: - непрерывного действия, которые непрерывно измеряют уровень - прерывистого действия(дискретного действия), сигнализируют наличие уровня(сигнализаторы уровня) По принципу действия: поплавковые, гидростатические, радиоизотопные, электрические, акустические Поплавковые уровнемеры Используются для измерения уровня в аппаратах. Поплавок перемещается при изменении уровня жидкости.
Выравнивающая сила собственный вес поплавка G=F. Принимаем, что S=const, тогда
При изменении уровня изменяется положение поплавка и связанного с ним плунжера преобразователя, при этом изменение ЭДС вторичной обмотки измеряют вторичным прибором проградуированном в единицах уровня.
Схема буйкового уровнемера с пневматическим преобразователем.
На конце заслонки есть сопло, которое образует пневмоконтакт, т.е. давление зависит от взаимного расположения сопла и заслонки и данная величина давления измеряется манометром М. При изменении уровня изменяется выталкивающая сила действующая на поплавок, изменение его положения и перемещение через трос преобразуется посредством вала 4, где наматывается трос 3, поворотом торсионной трубки 5 и связанного с ней вала 6 и заслонки 7.Это приводит к изменению давления воздуха в превмоустройстве 8. Оно пропорционально измеряемому уровню.
Пьезометрические
1- резервуар, 2- пьезотрубка, 3- ротаметр, 4- регулирующий вентиль, М- монометр
Когда уровень h превышает давление р в пьезотрубке воздух не выходит, при увеличении давления воздух начинает барбатировать жидкость Р = Емкостные уровнемеры 1- 2- электрод (металлический стержень) 3- защитная пленка 4- измерительная схема 5- вторичный прибор
Металлический корпус и электрод образуют цилиндрический конденсатор, его электроемкость Электроемкость конденсатора пропорциональна уровню жидкости в резервуаре. Для измерения электроемкости используется схема 4, при этом электроемкость измеряется двумя методами: - Резонансный, параллельно емкости включается катушка, образуется колебательный контур, который настраивают на резонансную частоту при некотором уровне С (емкости h). Если h изменяется, то изменяется С, происходит срыв резонансных колебаний, нарушение резонанса фиксируется вторичным прибором. - Электронные сигнализаторы уровня. Конденсатор включается в одно из плеч мостовой схемы, при изменении уровня меняется емкость С, изменяется напряжение измерительной диагонали данной мостовой схемы. Напряжение измеряется вторичным прибором 5, который градуируется в единицах уровня (уровнемер) ЭИВ электронноизмеритель высоты. При измерении уровня электропроводных сред электрод 2 покрывается изолирующими материалами. При измерении уровня агрессивных сред электрод выполняется из каррозионностойкого материала или покрывается пленкой. Омические уравнемеры
К – реле К1 включена в цепь вторичной обмотки трансформатора В цепь контактов реле включена лампочка L. К3 катушки магнитного пускателя. 1- резервуар, 2- Блок электродов, 3-изолирующая колодка. Среда в резервуарах электропроводная Принцип действия: при достижении уровня электродов жидкостью, цепь замыкается реле срабатывает, загорается лампочка, включается К3 и выключается насос. Данные уровнемеры – сигнализаторы уровня. (ЭРСУ-М) Расходомеры индукционные Принцип действия Р основан на измерении электро движущей силы, которая индукцирована в потоке электропроводной жидкости под воздействием внешнего магнитного поля.
Под воздействием магнитного поля ионы, которые находятся в жидкости, перемещаются и отдают свои заряды измерительным электродам, образуя э.д.с. E, пропорционально скорости движения жидкости. К электроду подключается измерительный прибор 4.
Величина э.д.с. в случае постоянного магнитного поля находится из уравнения магнитной индукции:
где B – магнитная индукция в отверстии между полюсами магнита; d – внутренний диаметр трубопровода; x – средняя скорость движения жидкости. Через объемный расод:
При однородном магнитном поле величина э.д.с. пропорциональна объемному расходу. Недостатки связаны с возникновением на электродах э.д.с. поляризации, гальванической э.д.с. постоянного потока. Эти недостатки делают тяжелым правильное измерение э.д.с. Чаще всего используют расходомеры переменного магнитного поля. Когда магнитное поле изменяется во времени, то величина э.д.с.:
При переменном магнитном поле электромагнитные процессы делают меньшее влияние на показание прибора, чем при постоянном. Электромагнитные расходомеры имеют много достоинств. Они практически безинерционные, что очень важно при измерении быстроизменяющихся расходов и при использовании их в системах автоматического регулирования. На результат измерения не воздействует наличие в жидкости частиц и пузырьков газа. Показания расходомеров не зависят от свойств жидкостей (плотности) и от характера потока (ламинарный, турбулентный). Можно использовать при измерение расхода агрессивных сред, если выполнить расходомер с специально материала. Погрешность измерения 0,5-1%. Контактный метод Основан на зависимости удел.электропроводности различных рос-в от их концентрации. Данная зависимость опред-ся з-м Кальрауша
F- число Фарадея
VA,VK-АБСОЛЮТНАЯ подв-ть анионов и катионов
На практике прин-ся полученные эксперимен-м путем зависимости Положена в основу построения следу-х датчиков:контактный с2-х электродной ячейкой и с 4-х электродной ячейкой, бесконтактный низкочастотный и бесконтактный высокочастотный. С 2-х электродной ячейкой. Ячейка состоит из 2-х пластин площ.S и расстоянием между нимиL. Сопротивление столба элект-ти между пластинами RX= С 4-х электродной ячейкой Измер.ячейка заполн-ся Конт-ой средой и имеет 4 электрода. Элнктроды1 и 4 –токовые, 2.3-потенциометрические. Данная ячейка питае-ся от вторичной обмоткиW3 транзистора Т.на электродах 2,3 протекающим током созда-ся U23=Iяч*Rяч,сопоставимо С и Для изм-ия U23 примен-ся компенсационная мостовая схема. Мостовая схема имеет две диогонали питающая-W2 Т и измер-ая- а и в (Uав). U23сравн-ся с Uав если не равны то на вход усилителя поступает разность. она усил-ся и поступает на РД.РД приходит во вращение и перемещает стрелку. В некоторый момент Uав= U23.двигатель останавливается,шкала градуир-ся в единицах концентрации. Поплавковые плотномеры Они подразделяются на плотномеры с плавающим поплавком(аэрометры пост. веса) и плотномеры с полной погруженным поплавком(аэрометры пост. объема). Схема: 1. Через дан. датчик протекает среда, уровень среды постоянный. При измен. плотности измен. сила действия на поплавок. При увелич. плотности выталкивающая сила увелич., поплавок поднимается вверх, и вверх перемещается плунжер(6) зменяется ЭДС на вторичной обмотке дан. преобпазования. Дан.ЭДС=p, вторичное приобраз. градуируется в единицах плотности. Аналогично устроены аэрометры постоянного объема. У них поплавок полностью погружается в контролируемую среду. При измен. плотности измен. выталкивающ. сила., измен.его вес, Выталкивающая сила преобразуется в инертный сигнал котор. формируется на вторичной обмотке, диформация преораз.преобразователя. Дан. датчик может быть выполнен с пневматическим преобразователем. Гидростатические плотномеры Принцип действия основан на измерении давления столба жидкости высот. Н и плотности р. Р=рgH Если Н=const, то Р
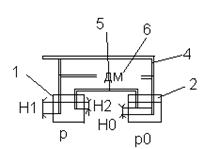
Схема:
1) Основной резервуар с контр. средой с плотн. р 2) Резервуар заполн. жд-и до уровня с извест. р0 в этот резервуар помещен пьезометр трубки(3) и (4). Эти резервуары соеденины м/д собой трубкой(5). Трубки 3 и 4 соед. левым и правым коленями. Ч/з пьезотрубку продувается сжат. воздуха. Давление воздуха в левом колене: Р1=рgH; в правом Р2= р0 gH0+pgH2 Показания ДМ равно разности данных давлений: Величина Температурный комплекс погрешности в дан. плотномерах производится, тем, что контрольный сосуд(2) помещ. в контролируемую среду находящ. в сосуде (1), тем самым обеспечивая одинаковые температурные условия Радиоизотопные плотномеры. Применяется для измерения плотности различных средв т.ч. вязких кристаллических и твердоподобных. Основано на поглощении
С- удельное содержание i-того компонента в материале
Если х и Схема:
1) Ист-к гама излучения. 2) Приемник 3) Блок в который поступает сигнал преобразующих в электр. унифицир. сигнал. Он усиливается в блоке (4) и величина плотности имеряется вторичными приборами(5). Данная схема реализуется в пром-и в приборах ПИСР.
Метод точки росы Для измерения влажности газов применяются методы: 1.Психометрический 2. Метод точки росы Для твердых тел применяются след. методы: 1. Электрокондуктометрический 2. Метод диэлектрической проницаемости 3. Метод ИК-излучения. В данном методе при измерении влажности газов параболическое зеркало датчика непрерывно охлаждается. При невысокой температуре на его поверхности начинает образовываться влага (выпадает роса) и зеркало мутнеет. Моментальное помутнение зеркала контролируется с помощью ослабления яркости отражения от него светового луча. Данная температура зеркала, при котором оно мутнеет, называется точкой росы и является мерой относительной влажности контролируемой среды. Приборы реализ. данный принцип наз. влагомерами «Роса». Объекты регулирования Свойства объекта регулирования определяет система АСР, поэтому для выбора типа регулятора его настроек необходимо знать динамические характеристики объектов регулирования. Динамической характеристикой ОР – зависимость выходной величины ОР( ОР может быть часть какого либо аппарата или аппарат. Один объект может быть объектом нескольких АСР. Несмотря на многообразие аппаратов как ОР по динамическим характеристикам они близки и их классифицируют по динамическим характеристикам на виды: Одноемкостные статические объекты, Одноемкостные астатические объекты, Двухьемкостные статические объекты, Двухьемкостные астатические объекты. Автоматические регуляторы. В АСР непрерывно измеряется значение регулируемой величины, а воздействие регулятора на объект регулирования может быть различным в зависимости от характера воздействия АР делятся на АР: прерывистого действия и непрерывного действия. Регуляторы прерывного действия делятся: импульсные, релейные, позиционные. Статические регуляторы
Q-нагрузка(приток, сток) φ1уст., φ2 уст. –статич. ошибка—отклонение регулир-ой величины от φ0 в статич-м, устан-м режиме. В простейшем случ. μ=f(∆φ). При этом данная зависимость μ=kp∆φ kp—коэф. усиления регул-ра. kp=const, поэт.-регул-ры пропорц-е
Из графика-и мгновенное изменяется при появлении ∆φ без запаздывания и возд-ет на объект регулир-я. При этом сокращ-ся время перехода процесса АСР, т.е. сокр-ся время регули-я данного параметра. Достоин-ва регул-ра:1. хорошие динамич. св-ва Недостатки: плохие статич. св-ва(наличие статич. ошибки-статизм регулир-я: φст.=1/ kp, ее можно понижать, увеличив kp). Область применения: для регулир-я объектов, допускающ. статич. ошибку регулирован. и подвержен. небольш. и редким возмущениям. Выбор данного регулятора Исходные данные: 1 динамические характеристики объекта регулирования - 2 Определяется величина амплитуды колебания
Далее принимается значение
Далее определяем величину статической ошибки (
Если Если Далее проверяем Т
 находим находим  , после чего – значение Т , после чего – значение Т  . Далее по каталогу для полученных . Далее по каталогу для полученных  и Т выбираем тип релейного регулятора. При этом Т обеспечивает апериодический переходной процесс. и Т выбираем тип релейного регулятора. При этом Т обеспечивает апериодический переходной процесс.
Исполнительные механизмы по виду энергии для питания данных устройств применяются: 1. электрические исполнительные механизмы; 2. пневмотические исполнительные механизмы. Исполнительные устройства Устройство автоматической системы управления или регулирования, воздействующее на процесс в соответствии с получаемой командной информацией, называется исполнительным устройством. Оно предназначено для изменения притока или расхода вещества либо энергии и приближения регулируемой величины к заданному значению. Исполнительные устройства состоят из пневматического, электрического или гидравлического исполнительного механизма и регулирующего органа. В химической промышленности в автоматических системах часто используют пневматические мембранный и поршневой исполнительные механизмы, а в качестве регулирующих органов—регулирующий клапан и заслонку. Наибольшее распространение получил пневматический мембранный исполнительный механизм (рис. III-19, а), выполненный из прорезиненной мембраны, зажатой между двумя крышками так, что в верхней части образуется герметически закрытая полость. Снизу через жесткий центр, связанный со штоком, мембрана опирается на пружину. Сжатый воздух от автоматического регулятора направляется в верхнюю полость над мембраной и перемещает ее вместе со штоком вниз. При этом пружина сжимается и уравновешивает усилие, действующее на мембрану сверху. Перемещение штока передается на регулирующий орган. В отличие от мембранного, в поршневом пневматическом исполнительном механизме (рис. III. 19,б) сжатый воздух от регулятора подается в цилиндр и перемещает поршень со штоком и регулирующий орган. Схемы регулирующих органов показаны на рис. III-20. В регулирующем клапане шток исполнительного механизма жестко связан с затвором (рис. 111-20, а). При перемещении последнего относительно седла изменяется проходное сечение и соответственно расход вещества, проходящего через регулирующий орган. В заслоночном регулирующем органе (рис. Ш-20, б) шток привода через рычаг, соединенный с осью, вращает заслонку, которая изменяет расход вещества. Исполнительное устройство, состоящее из пневматического мембранного исполнительного механизма и регулирующего органа, называют пневматическим регулирующим клапаном (рис. III-21). По виду запорпого устройства пары затвор—седло пневматические регулирующие клапаны делят наодноседельные и двухседельные. Первые имеют неуравновешенный затвор, так как на него действует выталкивающая сила среды, и поэтому применяются в исполнительных устройствах малых размеров при низких давлениях среды. Вторые имеют уравновешенный затвор и используются в исполнительных устройствах больших размеров и при высоких давлениях среды.
Рис. III.19. Схемы мембранного (а) и поршневого (б) исполнительных механизмов: 1 _ шток; 2 — пружина; 3 — мембрана; 4 — поршень.
Рис. Ш-20. Схемы регулирующих органов:
Рис. Ш-21. Схемы пневматических регулирующих клапанов: а — нормально открытого (НО): б—нормально закрытого (НЗ)- 1—корпус; 3 — аатвми 3 — шток; 4 — пружина; 5—мембрана. При расчете АСР пневматический регулирующий клапан представляют апериодическим звеном 1-го порядка. Динамическая характеристика
Способы мат. Описания АСР. Динамические характеристики элементов АСР описываются 2-мя способами: 1)Дифф.уравнения 2)Передаточные функции Передаточные функции. Преобразование Лапласа имеет след. вид
Свойства преобразования при нач.нулевых значениях т.е.t=0 x(t)=0 1) Преобразование по Лапласу с использованием его свойств
Отношение преобразуем по Лапласу выходной величины АСР или линейно к преобразованной по Лапласу входной величины элемента называется передаточной функцией АСР или элемента. Знаменатель передаточной функции = 0, наз-ся характеристическим уравнением АСР А Инерционное звено Динамическая характеристика такого звена имеет вид: T T-постоянное времени, к-коэф. усиления. x-const; y= По формуле(3.2.4) построим графики переходного процесса:
Для этого (3.2.3)преобразуем по Лапласу:
Одноемкостные статические обьекты: термопары, мембрано-исполнительный механмзм.Данное звено называется аппериодическим звеном 1-го порядка. Интегрирующее звено Динам хар-ка: Т*dy/dt=к*х Преобразуем: dy/dt=к*х/Т,
|
||||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-21; просмотров: 399; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.14.130.24 (0.198 с.) |

 будет постоянной для всего диапазона х
будет постоянной для всего диапазона х , где k=const, то такой датчик называется линейным. Если статическая характеристика датчика имеет разрывный характер вида y=0 при 0<x<a, y=y1 при x>a, то датчик называется релейным.
, где k=const, то такой датчик называется линейным. Если статическая характеристика датчика имеет разрывный характер вида y=0 при 0<x<a, y=y1 при x>a, то датчик называется релейным.



 *100%
*100% Для устранения погрешности применяют специальные схемы ЭДС данных холодных спаев.
Для устранения погрешности применяют специальные схемы ЭДС данных холодных спаев.
 е2
е2 7 Манометрические термометры состоят с термобалона, капиллярной трубки и датчика давления (манометра). Термобалон размещается в окружения, где измеряется температура. Температура окружения воздействует на физическое состояние вещества внутри баллона, что приводить к изменению давления. Это давление через капиллярную трубку передается на расстояние в 60 м, диаметр трубки 0,2-0,5 и фиксируется манометром, шкала градуирована в градусах Цельсия. Материал нержавеющая стиаль, трубка медная В качества чувствительных веществ используют газы, жидкость и газожидкосные смеси. Диапазон измерительных температур от -50 С к 600 С. Класс точности примерно 1,5. Могут использоваться в пожаро-, взрывоопасном окружении. Манометрические термометры бывают газовые и жидкостные:
7 Манометрические термометры состоят с термобалона, капиллярной трубки и датчика давления (манометра). Термобалон размещается в окружения, где измеряется температура. Температура окружения воздействует на физическое состояние вещества внутри баллона, что приводить к изменению давления. Это давление через капиллярную трубку передается на расстояние в 60 м, диаметр трубки 0,2-0,5 и фиксируется манометром, шкала градуирована в градусах Цельсия. Материал нержавеющая стиаль, трубка медная В качества чувствительных веществ используют газы, жидкость и газожидкосные смеси. Диапазон измерительных температур от -50 С к 600 С. Класс точности примерно 1,5. Могут использоваться в пожаро-, взрывоопасном окружении. Манометрические термометры бывают газовые и жидкостные: где
где  - давление газа при температуре измерения,
- давление газа при температуре измерения,  - при температуре 20 С (температура градуировки),
- при температуре 20 С (температура градуировки),  - объемный коэффициент расширения газа. Погрешность связанная с колебанием давления отсутствует из-за высокого
- объемный коэффициент расширения газа. Погрешность связанная с колебанием давления отсутствует из-за высокого  . Погрешность связанная с отклонением
. Погрешность связанная с отклонением  от 20 С (температура градуировки) в каторой находится капилляр; погрешность рассчитывается для капилляра и манометрической части
от 20 С (температура градуировки) в каторой находится капилляр; погрешность рассчитывается для капилляра и манометрической части  где
где  - объем капилляра манном. части,
- объем капилляра манном. части,  - об. баллона,
- об. баллона,  -окружающая среда,
-окружающая среда,  - 20 С
- 20 С , где
, где  - объемный коэффициент сжатия жидкости.
- объемный коэффициент сжатия жидкости.  - разность температур
- разность температур , ртуть
, ртуть 
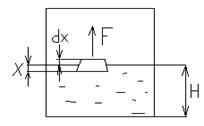

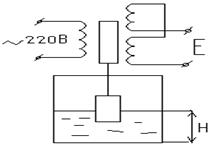 Схема поплавкового уровнемера с электронным дифференциальным трансформаторным преобразователем
Схема поплавкового уровнемера с электронным дифференциальным трансформаторным преобразователем 1-резервуар, 2- буек, 3- трос, 4- вал, 5- трубка,6- вал,7-заслонка, 8-пневмоустройство
1-резервуар, 2- буек, 3- трос, 4- вал, 5- трубка,6- вал,7-заслонка, 8-пневмоустройство
 g Н. Метод применяется для измерения уровня вязких сред.
g Н. Метод применяется для измерения уровня вязких сред. металлический корпус
металлический корпус
 Т – трансформатор
Т – трансформатор =2.103См/м.
=2.103См/м. Трубопровод 1 с жидкостью расположен между полюсами 2 и 3 магнита перпендикулярно направлению силовых линий магнитного поля. Трубопровод делают с немагнитного материала (фторопласт). Возле стенки диаметрально противоположно устанавливают измерительные электроды.
Трубопровод 1 с жидкостью расположен между полюсами 2 и 3 магнита перпендикулярно направлению силовых линий магнитного поля. Трубопровод делают с немагнитного материала (фторопласт). Возле стенки диаметрально противоположно устанавливают измерительные электроды.

 =С
=С 
 С- его концентрация
С- его концентрация -степень электролитической диссоциации
-степень электролитической диссоциации .В ЗНАЧИТЕЛЬНОМ ДИАПОЗОНЕ ЗАВИСИМОСТЬ ЯВЛЯЕТСЯ ЛИНЕЙНОЙ.
.В ЗНАЧИТЕЛЬНОМ ДИАПОЗОНЕ ЗАВИСИМОСТЬ ЯВЛЯЕТСЯ ЛИНЕЙНОЙ. . RX сопоставим с С.для компенсации температурной погрешности в контроли-ю среду помещают термосопротивление.
. RX сопоставим с С.для компенсации температурной погрешности в контроли-ю среду помещают термосопротивление. корпус; 2. металл. поплавок; 4. шток; 6. диф трансформатор
корпус; 2. металл. поплавок; 4. шток; 6. диф трансформатор р. В этих приборах измен. Разность давлений 2-х столбцов жд-и Н1 и Н2:
р. В этих приборах измен. Разность давлений 2-х столбцов жд-и Н1 и Н2:
 Это необходимо для обеспечения постоянства уровня контролируемой среды. И температурной компенсации погрешности.
Это необходимо для обеспечения постоянства уровня контролируемой среды. И температурной компенсации погрешности.
 .
. излучения. Интенсивность гама излуч. При прохожд. его ч/з слой в-ва толщиной х и плотн. р определяется:
излучения. Интенсивность гама излуч. При прохожд. его ч/з слой в-ва толщиной х и плотн. р определяется:
 -инт-ть гама излуч. после прхожд. слоя.
-инт-ть гама излуч. после прхожд. слоя. -первоначальная инт-ть.
-первоначальная инт-ть.
 - коэф. поглощения
- коэф. поглощения

 ) выраженная аналитически или графически от времени при изменении входных величин и действующих на ОР (
) выраженная аналитически или графически от времени при изменении входных величин и действующих на ОР ( Статич-е регулир-е—при кот-м каждому положению регулирующего органа соотв-т определенное значение регулируемой величины в статич. режиме, зависящее от величины нагрузки, дейст-ей на объект регулир-я. График статич. режима изменения регул-ой величины нагрузки, действ-ей на объект (притока, стока)
Статич-е регулир-е—при кот-м каждому положению регулирующего органа соотв-т определенное значение регулируемой величины в статич. режиме, зависящее от величины нагрузки, дейст-ей на объект регулир-я. График статич. режима изменения регул-ой величины нагрузки, действ-ей на объект (притока, стока) Динамич. хар-ка
Динамич. хар-ка ,Т,К
,Т,К  ,
, 

 без зоны нечувствительности. Для этого используется зависимость
без зоны нечувствительности. Для этого используется зависимость  , по которой находят значение
, по которой находят значение  и далее -
и далее - 
 >
>  определяем зону нечувствительности релейного регулятора
определяем зону нечувствительности релейного регулятора
 ):
): , единицы физ. величины.
, единицы физ. величины. - единицы физ. величины.
- единицы физ. величины. , то релейный регулятор можно применять для данного объекта.
, то релейный регулятор можно применять для данного объекта. , то принимаем регулятор непрерывного действия.
, то принимаем регулятор непрерывного действия. . Т
. Т  6)
6)  - время полного хода исполнительного механизма. Он выбирается по графику зависимости
- время полного хода исполнительного механизма. Он выбирается по графику зависимости 




 а — одкоседельного; б— заслоночного; 1 — корпус; 2 — затвор; 3 — шток; 4 — заслонка.
а — одкоседельного; б— заслоночного; 1 — корпус; 2 — затвор; 3 — шток; 4 — заслонка.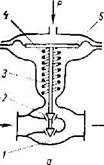
 где Т-время зависит от жосткости, Q-велична потока K-величина усиления, Р-давления воздуха.
где Т-время зависит от жосткости, Q-велична потока K-величина усиления, Р-давления воздуха.
 гдн
гдн  -оргумент,
-оргумент,  - изображение данного аргумента,
- изображение данного аргумента,  - некаторая переменная кот.наз. переменная Лапласа
- некаторая переменная кот.наз. переменная Лапласа ,
,  , 2)
, 2)  , 3)
, 3)  ,
,  , 4)
, 4)  , где L-преобразование
, где L-преобразование возьмем отношение
возьмем отношение 

 (3.2.3)
(3.2.3) (3.2.4)
(3.2.4)

 ;
;  ;
; 
 (3.2.5)
(3.2.5) ,Проинтегрируем: y-y0=к/Т*
,Проинтегрируем: y-y0=к/Т*  , х=cоnst, y=кх/Т*t+y0
, х=cоnst, y=кх/Т*t+y0


