Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Безконтактні схеми керування
Пускорегулювальні безконтактні пристрої (ПРБП) використовуються для пуску, реверсування, гальмування і безступеневого регулювання швидкості асинхронних двигунів і двигунів постійного струму. Внаслідок керування електродвигунами за допомогою керованих вентильних перетворювачів напруга на їхніх затискачах і струм у навантаженні мають пульсуючий характер, а на змінному струмі не синусоїдну форму. В результаті цього, а також в процесі комутації з’являються вищі гармонічні складові напруг і струмів, які призводять до додаткового нагрівання двигунів і виникненню радіозавад в цеховій електромережі. Додаткове нагрівання двигунів залежить від коефіцієнту пульсацій Кі
Нагрівання двигунів постійного струму зростає на 5 – 7 % при Кі = 25 %, на 15 – 22 % при Кі = 35 %. У випадку регулювання швидкості асинхронних двигунів зростають втрати ковзання. Щоб двигуни не перегрівалися, їх встановлена потужність повинна бути вище розрахункової. Вибір ПРБП розглянемо на прикладі механізму переміщення візка. Розраховуємо статичні моменти опору під час переміщення візка з номінальним вантажем (М1) і без нього (М2), приймаючи
В період розгону максимальний момент двигуна:
Номінальний момент двигуна:
(2,3 – кратність максимального моменту для режиму S3). Кратність пускового моменту в період розгону:
Знаходимо номінальне ковзання Sном і ковзання для максимального моменту двигуна
Визначаємо відношення максимального моменту до моменту перемикання
ПРБП вибирається і перевіряється за умовою:
Imax – допустимий максимальний струм пристрою, А;
Мн – номінальний момент двигуна, Мсер – середній пусковий момент, В зв’язку з тим, що в вибраному ПРБП регулювання швидкості здійсню -ється за допомогою асинхронно – вентильного каскаду введенням у коло ротора зустрічної ЕРС, то швидкість обертання буде змінюватися зі зміною цієї ЕРС згідно з виразом:
Ер – випрямлена напруга ротора, пропорційна ковзанню, Еі – зустрічна ЕРС інвертора,
Регулювання зустрічної ЕРС (Еі) здійснюється блоком керування пристроєм зміною кута відкривання тиристорів інвертора. Значення струму динамічного гальмування рекомендується вибирати для кожного двигуна окремо, виходячи з рівності потужностей втрат у гальмівному режимі і в режимі двигуна:
звідки
Rф – активний опір однієї фази;
Враховуючи ці положення вибір безконтактних пристроїв необхідно вико -нувати таким чином, щоб його потужність була як можна ближчою до потужності вибраного двигуна.
І. Механічні характеристики електроприводу з двигуном змінного Струму (приклади і задачі).
1. Асинхронний двигун з фазним ротором типу МТ31-6 (Рн = 11,0кВт, Uн = 380 В, Ін =28,4 А, nн =953 об/хв, r 1= 0,415 Oм, x1 =0,465 Ом, U2k = 200 В; І2н = 35,4А; г2 = 0,132 Ом, х2 =27 Ом, kе = 1.84, λ= Мк/Мн = 3,1) працює з реактивним моментом на валі М = 95 Н∙м. Визначити величину пускового моменту цього двигуна та його кутову швидкість при статичному навантаженні, якщо в коло ротора ввести додатковий резистор з опором R = 1,1 Ом. Розв'язок Приведені опори ротора до обмоток статора: r'2 = r2∙ kе2; r'2 = 0,132∙1,842 = 0,447 Ом; Rд'= Rд ∙ kе2; Rд' = 1,1 ∙ 1,842 = 3,724 Ом; х'2 = х2∙ kе2; x2 = 0,27 ∙ 1,842 = 0,914 Ом. Індуктивний опір при короткому замиканні: хк = х1 + х2; хк = 0,465 + 0,914 = 1,379 Ом. Номінальна кутова швидкість: ωн = π ∙ nн /30; ωн = π ∙ 953 /30 = 99,8 рад/с. Синхронна кутова швидкість: ω0 = π ∙ n0 / 30; ω0 = π ∙ 1000 / 30 = 104,7 рад/с. Номінальний момент на валі двигуна: Мн = Рн/ ωн; Мн = 11 ∙ 103 / 99,8 = 110,2 Н ∙ м. Критичний момент двигуна: Мк = 3,1 ∙ Мн: Мк = 3,1 ∙ 110,2 = 341,6 Н ∙ м. Механічна характеристика асинхронного двигуна:
Критичне ковзання на штучній характеристиці:
Відносна величина активного опору статора:
Пусковий момент на штучній характеристиці (s = 1.0)
Співвідношення критичного й статичного моментів λС = МН / МС: λС = 341,6 / 95 = 3,6.
Ковзання на штучній характеристиці при М= МС:
SCl = 24,9: SC2 = 0,336. Приймаємо SC2 = 0,336, яке відповідає режимові двигуна (Sc1 відповідає режимові противмикання). Швидкість обертання на штучній характеристиці при М = Мс: nс = (1 – SС): nс = 1000 ∙ (1 ∙ 0,336) = 664 об/хв. Кутова швидкість на штучній характеристиці при М = Мс: ωс =ω0 (1– SC): ωс = 104,7 ∙ (1 – 0,336) = 69,5 рад/с.
2. Асинхронний двигун потужністю Рн = 400 кВт (Uн = 380 В, nн =970 об/хв, U2k = 535 В; І2н = 475 А; λ= Мк / Мн = 2,5) приводить в рух підіймальний механізм. При опусканні вантажу зі швидкістю nс = 0,3 nн двигун працює в режимі противмикання з навантаженням Мс = 0,8 Мн. Визначити, що треба зробити з резистором у колі ротора, щоб при падінні напруги живлення на 20% забезпечити задану швидкість опускання вантажу.
Розв'язок. Синхронна кутова швидкість: ω0 = π ∙ n0/30; ω0 = π ∙ 1000/30 = 104,7 рад/с. Номінальне ковзання: Sн = (n0 – nн)/ n0; Sн = (1000 – 970)/1000 = 0,03. Критичне ковзання:
Активний опір обмотки однієї фази ротора:
; Ковзання при статичному навантаженні: Sc = Sн ∙ Мс / Мн; Sc = 0,03 ∙ 0,8 = 0,024. Ковзання при опусканні вантажу, коли Uм = Uн:
Опір додаткового резистора в колі ротора: Rд = (Sc пр. / Sс – 1) ∙ r2; Rд = (1,29 / 0,024 – 1) ∙ 0,0195 = 1,03 0м. Критичне ковзання на штучній характеристиці: Sкш = Sнш ∙ (r2 + Rд) / r2; Sкш = Sк ∙ (0,0195 + 1.03) / 0,0195 = 53,8 Sк. Співвідношення моментів при пониженій напрузі: λС = λ ∙ku2 ∙ Мн / Мс ; λС = 2,5 ∙ 0,64/0.8 = 2,0. Ковзання на штучній характеристиці:
Кутова швидкість двигуна при пониженій напрузі живлення: ωс = ω0 (1- SCш); ωс = 104,7 ∙ (і – 2,08) = –113 рад/с. Величина опору додаткового резистора в колі ротора, з яким двигун при пониженій напрузі буде працювати з заданою швидкістю:
Отже, треба зменшити опір додаткового резистора на ΔR = Rд – Rд 1; ΔR = 1,03 – 0,631 = 0,399 Ом.
3. У краново-металургійного асинхронного двигуна з фазним ротором типу MTF312-6 (Рн = 17,5 кВт, Uн = 380 В, Ін = 42,5 А, nн = 950 об/хв, r 1= 0,23 Oм, x1 =0,334 Ом, U2k = 233 В; І2н = 54 А; г2 = 0,107 Ом, х2 =244 Ом, kе = 2,66, λ = Мк / Мн = 2,4) з реактивним статичним навантаженням Мс = 108 Н. м потрібно змінити напрям обертання зміною двох фаз живлення статора. Визначити: - величину опору резистора, який треба при цьому ввести додатково в коло ротора для обмеження початкового гальмівного моменту до Мпр =0.81Мк; - величину моменту двигуна при зупинці (пускового в протилежному напрямку обертання); - кутову швидкість двигуна в протилежному напрямку, якщо величина статичного моменту при реверсуванні не зміниться. Розв'язок Приведені опори ротора до обмоток статора: r'2 = r2∙ kе2; r'2 = 0,107 ∙ 2,662 = 0,757 Ом; х'2 = х2∙ kе2; x2 = 0,244 ∙ 2,662 = 1,726 Ом. х н = х1 + х'2; хн = 0,344 + 1,726 = 2,06 Ом. Номінальна кутова швидкість: ωн = π ∙ nн /30; ωн = π ∙ 950 /30 = 99,5 рад/с. Синхронна кутова швидкість: ω0 = π ∙ n0 /30; ω0 = π ∙ 1000/30 = 104,7 рад/с. Номінальний момент двигуна: Мн = Рн / ωн; Мн = 17,5 ∙ 103 / 99,5 = 175,9 Н∙м. Критичний момент двигуна: Мк = 2,4 ∙ Мн; Мк = 2,4 ∙ 175.9 = 422,2 Н∙м. Початковий момент при противмиканні: Мпр = 0,8 ∙ Мк; Мпр = 0,8 ∙ 422,2 = 337,7 Н∙м. Номінальне ковзання: Sн = (n0 – nн) / n0; Sн = (1000 – 950)/1000 = 0,05. Ковзання на природній характеристиці при М = Мс: Sc = Sн • Мс / Мн; Sc = 0,05 ∙ 108 / 175,9 = 0,0306. Ковзання на штучній характеристиці при противмиканні Sш = 1 + (1 – Sc); Sш = 1 + (1 – 0,0306) = 1,97.
Відносна величина активного опору статора:
Співвідношення моментів критичного та противмнкання: λпр= Мк / Мпр. λпр = 422,2 / 337,7 = 1,25. Критичне ковзання на штучній характеристиці:
Sкш1 = 4,08; Sкш2 = 0,95. Приймаємо Sкш = 4,08, тому що це ковзання відповідає меншому гальмівному струмові. Величина приведеного додаткового опору в колі ротора:
Абсолютне значення опору додаткового резистора в колі ротора: Rд = R'д / kе2; Rд = 7,7 / 2,662 = 1,4 Ом. Величина пускового моменту на штучній характеристиці:
Співвідношення критичного й статичного моментів λс = Мк / Мс; λс = 422,2 / 108 = 3,91. Ковзання на штучній характеристиці при М = Мс:
Sш1.1= 34,04; Sш1.2 = 0,45. Приймаємо Sш1 = 0,45, тому що це ковзання відповідає режиму двигуна в протилежному напрямку обертання.
Кутова швидкість у протилежному напрямку обертання: ωш = ω0 (1 – Sш1.2); ωш = 104,7 - (1 – 0,45) = 57,7 рад/с.
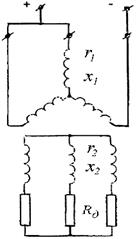
4. Асинхронний двигун з фазним ротором типу MTF411-8 (Рн = 18 кВт, Uн = 380 В, Ін = 46,7 А, nн = 700 об/хв, r 1= 0,327 Oм, x1 =0,53 Ом, U2k = 221 В; І2н = 59 А; г2 = 0,117 Ом, х2 =0,26 Ом, kе = 2,04, λ = Мк / Мн = 2,5) повинен працювати в режимі динамічного гальмування зі швидкістю ωш = – 32 рад/с. Статорна обмотка вмикаєтся до джерела постійного струму за схемою на рис.1. Активний статичний момент на валу двигуна М = 175 Н∙м. Рис.1. Схема динамічного гальмування двигуна. Визначити величину опору додаткових резисторів, які потрібно ввімкнути симетрично в коло ротора, щоб критичний момент у режимі динамічного гальмування дорівнював критичному моментові в рушійному режимі при номінальній напрузі живлення статора. Розв'язок Номінальна кутова швидкість: ωн = π ∙ nн /30; ωн = π ∙ 700 /30 = 73,3 рад/с. Синхронна кутова швидкість: ω0 = π ∙ n0 /30; ω0 = π ∙ 750/30 = 78,5 рад/с. Номінальний момент двигуна: Мн = Рн / ωн; Мн = 18 ∙ 103 / 73,3 = 245,6 Н∙м. Номінальне ковзання: Sн = (n0 – nн) / n0; Sн = (750 - 700)/750 = 0.067. Приймаємо, що відносна швидкість при номінальному моменті динамічного гальмування дорівнює номінальному ковзанню:
Vс = Sн; Vн = 0,067. Відносна швидкість при Мс = 175 Н∙м на характеристиці динамічного гальмування без додаткового резистора в колі ротора: Vc = Vн ∙ Мс / Мн; Vс = 0,067 ∙ 175/245,6 = 0,0475. Відносна швидкість на характеристиці з додатковим резистором Rx в колі ротора: Vс1= ωс / ω0; Vcl = 32 / 78,5 = 0,408. Величина опору додаткового резистора в колі ротора: Rд = r2 ∙ (Vcl / Vc –1); Rд = 0,117 ∙ (0,408 / 0,0475 –1) = 0,888 Ом. 5. Для асинхронного двигуна типу МТВ211-6 (Рн = 7,5 кВт, Uн = 380 В, Ін = 20,8 А, nн = 935 об/хв, r 1= 0,68 Oм, x1 =1,07 Ом, U2k = 255 В; І2н = 19,8 А; г2 = 0,44 Ом, х2 =0,88 Ом, kе = 1,38, λ = Мк / Мн = 2,5) розрахувати графоаналітичним методом опори резисторів для його пуску в три ступені. Момент статичного навантаження на валі двигуна Мс = 0,55 Мн; максималь- ний момент перемикання М1 = 150 Н∙м.
Розв'язок Приведені опори ротора до обмоток статора: r'2 = r2∙ kе2; r'2 = 0,44 ∙ 1,382 = 0,838 Ом; х'2 = х2∙ kе2; x2 = 0,88 ∙ 1,382 = 1,68 Ом. х к = х1 + х'2; хк = 1,07 + 1,68 = 2,75 Ом. Номінальна кутова швидкість: ωн = π ∙ nн /30; ωн = π ∙ 935 /30 = 97,9 рад/с. Синхронна кутова швидкість: ω0 = π ∙ n0 /30; ω0 = π ∙ 1000/30 = 104,7 рад/с. Номінальне ковзання: Sн = (n0 – nн) / n0; Sн = (1000 – 935)/1000 = 0,065. Номінальний момент двигуна: Мн = Рн / ωн; Мн = 7,5 ∙ 103 / 97,9 = 76,6 Н∙м. Критичний момент двигуна: Мк =2,5 ∙Мн; Мк =2,5 ∙76,6 = 191,5 Н∙м. Відносна величина активного опору статора:
Критичне ковзання на природній характеристиці:
Sк1= 0,36; Sк1 = 0,0114. Механічна характеристика асинхронного двигуна:
Задаючись значеннями ковзання від S = 0 до S = Sк, розраховуємо й зводимо в табл.1 та будуємо на рис.2. робочу частину природної механічної характеристики. Статичний момент навантаження: Мс = 0,55∙Мн; Мс = 0,55∙76.6 = 42,1 Н∙м. Мінімальний момент перемикання: Мн ≥ 1,2∙Мн; Мн ≥ 1,2∙42,1 ≥ 50,6 Н∙м. Таблиця 1.
Для визначення величини опорів пускових резисторів будуємо пускову діаграму в такій послідовності. Проводимо вертикальну лінію через точку з координатами: М = М1, S = 1. Ця вертикаль перетне природну характеритику в точці b й горизонтальну лінію, яка проходить через точку з координатами: М = 0, 5 = 0, в точці а. З'єднавши точки з координатами: М = 0, S = 0 та М = M1, S = 1, одержимо спрямлену штучну механічну характеристику двигуна з повністю введеними в коло ротора додатковими резисторами. Підбираючи М2 ≥ 50,6 Н∙м, поступовим наближенням будуємо пускову діаграму в три ступені (рис. 2.).
Рис.2. Пускова діаграма двигуна. З пускової діаграми визначаємо величину опорів додаткових резисторів, взявши до уваги, що відрізок ab = r2. de = Rд1; Rд1 = r2∙de/ab: cd = Rд2: Rд2 = r2∙cd/ab: bс = Rд3; Rд3 = r2 ∙bc/ab; be = Rп; Rп = r2 ∙be/ab: Rд1 = 0,44 ∙2,875 = 1,265 Ом; Rд2 = 0,44∙1331 = 0674 Ом; Rд3 = 0,44 ∙0,844 = 0,371 Ом; Rп = Rд1 + Rд2 + Rд3; Rп = 1.265 + 0.674 + 0.371 = 2.31 Ом.
6. Для асинхронного двигуна типу МТВ612-10 (Рн = 60 кВт, Uн = 380 В, Ін = 145 А, nн = 578 об/хв, U2k = 245 В; І2н = 153 А; λ = Мк / Мн = 3,0) розрахувати аналітичним методом опори резисторів, які потрібно ввімкнути додатково в коло ротора для запуску двигуна в чотири ступені (m = 4). Момент статичного навантаження при пуску Мс = 0,42 Мн; максимальний момент перемикання М1 = 2,1 Мн. Механічні характеристики двигуна на робочих ділянках вважати прямо - лінійними. Розв'язок Номінальна кутова швидкість: ωн = π ∙ nн /30; ωн = π ∙ 578 /30 = 60,5 рад/с. Синхронна кутова швидкість: ω0 = π ∙ n0 /30; ω0 = π ∙ 600/30 = 62,8 рад/с.
Номінальне ковзання: Sн = (n0 – nн) / n0; Sн = (600 – 578)/600 = 0,0367. Номінальний момент двигуна: Мн = Рн / ωн; Мн = 60 ∙ 103 / 60,5 = 991,3 Н∙м. Критичний момент двигуна: Мк = 3,0∙Мн; Мк = 3,0∙991,3 = 2973,9 Н∙м. Максимальний момент перемикання: М1 = 2,1∙Мн; М1= 2,1∙991,3 = 2081,7 Н∙м. Момент статичного навантаження: Мс = 0,42∙Мн; Мс = 0,42∙991,3 = 416,3 Н∙м. Мінімальний момент перемикання: М2 ≥ 1,2∙Мс: М2 ≥ 1,2∙416,3 ≥ 499,6 Н∙м. Активний опір обмотки однієї фази ротора:
Співвідношення максимального й мінімального моментів:
Опори додаткових резисторів: Rд4 = r2 ∙(λ –1); Rд4 = 0,034 ∙ (1,9 – 1) = 0,031 Ом. Rд3 = Rд4 ∙ λ; Rд3 = 0,031 ∙ 1,9 = 0,058 Ом. Rд2 = Rд3 ∙ λ; Rд2 = 0,058 ∙ 1,9 = 0,11 Ом. Rд1 = Rд2 ∙ λ; Rд1 = 0,11 ∙ 1,9 = 0,21 Ом. Мінімальний момент перемикання: М2 = M1 / λ: М2 = 2081,7 / 1.9 = 1095,6 Н∙м. Мінімальний момент перемикання М2 > 1.2 Мс, отже запуск двигуна здійсниться за заданим законом.
ІІ. Механічні характеристики електроприводу з двигуном постійного Струму (приклади і задачі). 7. Для двигуна постійного струму з незалежним збудженням потужністю Рн = 11 кВт (Uн = 220 В, Ін = 59 А, (ωн = 314 1/с) визначити ККД при номінальному навантаженні та величину внутрішнього опору якоря, враховуючи, що при номінальному навантаженні його постійні й змінні втрати рівні між собою. Розрахувати та побудувати: - природну електромеханічну характеристику; - штучну з введеним послідовно в коло якоря додатковим резистором з опором Rд = 1,63 Ом; - штучну при динамічному гальмуванні, в якої при номінальній швидкості струм у колі якоря дорівнює 118 А; визначити також опір додаткового резистора, який треба ввести послідовно в коло якоря для одержання цієї характеристики. Розв'язок Коефіцієнт корисної дії двигуна:
Внутрішній опір якоря двигуна: Rяд = 0,5∙(Uн∙Ін –Рн∙103)/Ін2; Rяд = 0,5 ∙ (220 ∙ 59 – 11 ∙ 103)/592 = 0,284 Ом. Конструктивний коефіцієнт:
Кутова швидкість неробочого ходу: ω0 =Uн /сФн; ω0 = 220 / 0,647 = 340 рад/с. Природна електромеханічна характеристика будується через дві точки з координатами: Ія = 0, ω = ω0, та Ія = Ін., ω = ωн. Ця характерисика повинна обовязково проходити через точку з координатами: ω = 0, Ія = Ікз. Це дає можливість проконтролювати правильність розрахунку. Струм короткого замикання кола якоря: Ікз = Uн / Rяд; Ікз = 220 / 0,284 = 774,5 А. Треба відмітити, що струм короткого замикання у 13,1 разів більший від номінального. Кутова швидкість на штучній характеристиці при номінальному навантаженні:
Штучна електромеханічна характеристика будується через точки з координатами: Ія = 0, ω = ω0, та Ія = Ін, ω = ωш. Електромеханічна характеристика динамічного гальмування будується через точки з такими координатами: Ія = 0, ω = 0, та Ія = –118А, ω =ωн. Величина опору додаткового резистора, який потрібно ввести послідовно в коло якоря при динамічному гальмуванні:
Розраховані характеристики зображені на рис. 7.1.
Рис. 7.1. Розрахункові характеристики двигуна.
8. Для двигуна постійного струму з незалежним збудженням потужністю Рн = 3,2 кВт (Uн = 220 В, Ін = 19 А, nн = 750 об/хв., Rяд = 0,735 Ом) розрахувати аналітичним і графоаналітичним методами опори пускових резисторів у чотири ступені. Максимальний струм перемикання І1 = 41,8 А. Струм статичного навантаження Іс = 17 А. Мінімальний струм перемикання І2 потрібно визначити. Розв'язок Аналітичний метод Співвідношення І1 / І2 = λ,
Опори пускових резисторів: r1 = λ3 ∙(λ –1) ∙ Rяд; r1 = 1,643 ∙ (1,64 – 1) ∙ 0,735 = 2,05 Ом. r2 = λ2 ∙(λ –1) ∙ Rяд; r2 = 1,642 ∙ (1,64 – 1) ∙ 0,735 = 1,26 Ом. r3 = λ ∙(λ –1) ∙ Rяд; r3 = 1,64 ∙ (1,64 – 1) ∙ 0,735 = 0,76 Ом. r4 = (λ –1) ∙ Rяд; r4 = (1,64 – 1) ∙ 0,735 = 0,46 Ом. Сумарний опір пускових резисторів: Rп = r1 + r2 + r3 + r4; Rп = 2,05 + 1,26 + 0,76 + 0,46 = 4,53 Ом. Сумарний опір кола якоря: Rкя = Rп + Rяд; Rкя = 4,53 + 0,735 = 5,265. Схема вмикання резисторів показана на рис. 7.2 а. Графоаналітичний метод Номінальна кутова швидкість: ωн = π ∙ nн /30; ωн = 3,14 ∙ 750/30 = 78,5 рад/с. Конструктивний коефіцієнт двигуна:
Кутова швидкість неробочого ходу: ω0 = Uн / сФн; ω0 = 220 / 2,62 = 84 рад/с. Будується природна характеристика ω = f(Ія), яка проходить через точки з координатами: Ія = 0, ω = ω0, та Ія = Ін, ω = ωн. Мінімальний струм перемикання: І2 = І1/ λ; І2 = 41,8 / 1,64 = 25,5 А. Провівши вертикальні лінії через І1 та І2 до перетину з природною характеристикою будується відтак пускова діаграма в чотири ступені, починаючи від точки з координатами: Ія = І1, ω = 0. Остання горизонтальна лінія повинна прийти в точку b. На діаграмі відрізок аb ~ Rяд, fе ~ r1, ed ~r2, dc ~ r3, cb ~ г4.
Отже, опори пускових резисторів: r1 = fe/ab ∙ Rяд; r1 = 2,82 ∙ 0,735 = 2,07 Ом. r2 = ed/ab ∙ Rяд; r2 = 1,73 ∙ 0,735 = 1,27 Ом r3 = dc/ab ∙ Rяд; r3 = 0,95 ∙ 0,735 = 0,77 Ом r4 = cb/ab ∙ Rяд; r4 = 0,63 ∙ 0,735 = 0,46 Ом Повний опір пускових резисторів: Rп = fb/ab ∙ Rяд; Rп = 6,2 ∙ 0,735 = 4,57 Ом Аналітичний і графоаналітичний методи розрахунку дали достатньо близькі значення опорів пускових резисторів.
Рис. 8.1. Схема включення додат – кових резисторів а) і характеристики Двигуна.
9. Визначити приведені до валу двигуна статичний момент і момент інерції механізму підіймача (рис. 9.1) при підійманні вантажу масою 1300 кг з швидкістю V = 1,7 м/с. Двигун обертається з кутовою швидкістю ω = 97 рад/с. Діаметр барабана Dб = 0,65 м, момент інерції Jб = 8,1 кг ∙м2. Коефіцієнт корисної дії (ККД) передач η = 0,82. Момент інерції редуктора, приведений до валу двигуна, Jр = 0,12 кг∙м2. Масою троса можна знехтувати.
Розв'язок Статичний момент, приведений до валу двигуна, при підійманні вантажу:
Кутова швидкість барабана:
Передавальне число передач:
Момент інерції, приведений до валу двигуна:
Довідниковий матеріал. Таблиця №1 Класифікація кранів по режимам роботи
Таблиця №2. Дані фактичного режиму роботи різних кранів
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-19; просмотров: 701; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.221.187.121 (0.218 с.) |





 :
:

 і середній момент Мсер під час розгону електродвигуна:
і середній момент Мсер під час розгону електродвигуна:

 , де
, де - номінальний струм в колі ротора двигуна, А;
- номінальний струм в колі ротора двигуна, А; ;
; , де
, де синхронна швидкість обертання,
синхронна швидкість обертання, падіння напруги на активних опорах,
падіння напруги на активних опорах, падіння напруги на вентилях випростувача,
падіння напруги на вентилях випростувача, падіння напруги на індуктивних опорах обмоток ротора і згладжувальних дроселях.
падіння напруги на індуктивних опорах обмоток ротора і згладжувальних дроселях.
 , де
, де еквівалентний струм динамічного гальмування;
еквівалентний струм динамічного гальмування; кількість фаз статорної обмотки, які беруть участь у динамічному гальмуванні;
кількість фаз статорної обмотки, які беруть участь у динамічному гальмуванні; номінальний фазний струм двигуна.
номінальний фазний струм двигуна.