Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Третя умова подовжньої стійкості навантажувача ⇐ ПредыдущаяСтр 4 из 4
(19)
(20)
Навантажувач з вантажем на 10% більше номінального, піднятим від зем-лі на висоту h = 0,3 м, і повністю відхиленим назад вантажопідйомником рухається з максимальною швидкістю і загальмовується з уповільненням j = 1,5 м/с2 (Рис. 5).
Рис. 5. Розрахункова схема до третьої умови стійкості
Координата центру ваги вантажу з урахуванням нахилу вантажопідйом-ника назад визначається через відомі параметри навантажувача
де h – висота піднімання вантажу від землі; за умовами перевірки h = 0,3м; b – найбільший кут нахилу вантажопідйомника назад (Додаток 3), град.
Сили інерції навантажувача і вантажу
де mН, mВ – маси навантажувача і вантажу, т; слід мати на увазі, що за умовами перевірки маса вантажу має бути на 10% більше номінальної;
j = 1,5 м/с2 – уповільнення навантажувача при гальмуванні. Коефіцієнт запасу стійкості
Четверта умова подовжньої стійкості навантажувача
Навантажувач з номінальним вантажем, піднятим на висоту h = 0,3 м, і повністю відхиленим назад вантажопідйомником стоїть на майданчику з ухи-
лом 18% (a = 10°12’) (Рис. 6).
Рис. 6. Розрахункова схема до четвертої умови стійкості
Координата центру ваги вантажу з урахуванням нахилу вантажопідйом-ника назад визначається за формулою (21). Коефіцієнт запасу стійкості
де a = 10°12’– ухил робочого майданчика.
П’ ята умова подовжньої стійкості навантажувача
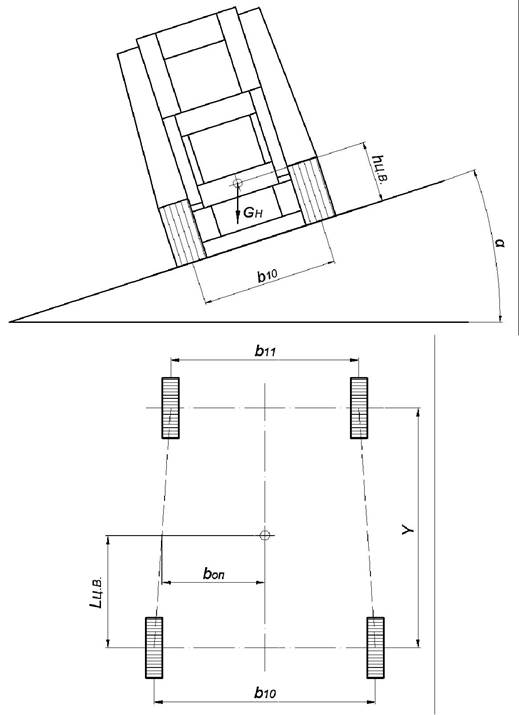
Навантажувач без вантажу з вилами на висоті h = 0,3 м, і повністю відхи-леним назад вантажопідйомником з'їжджає зі схилу на максимальній швидкос-ті і з різким поворотом. Перевірка цієї умови в статичному режимі випробуван-ня ведеться таким чином: вектор сили ваги навантажувача, розміщеного на майданчику з ухилом (15+1,09VН)%, не повинен вийти за опорний контур на-вантажувача. Таким чином ухил майданчика залежить від номінальної швидко-
сті руху навантажувача VН, км/г. Значення коефіцієнту запасу стійкості випли-ває з розрахункової схеми (Рис. 7).
Рис. 7. Розрахункова схема до п’ ятої умови стійкості
Коефіцієнт запасу стійкості
де bОП – відстань від вісі симетрії до опорного контуру на рівні центу ваги на-вантажувача;
a – ухил робочого майданчика, град.
де b10, b11 – відстань між крайніми передніми та задніми колесами відповідно (Додаток 3), м;
Y – колісна база навантажувача, м.
Перевірка поперечної стійкості навантажувача
Навантажувач з піднятим на повну висоту номінальним вантажем і пов-ністю відхиленим назад вантажопідйомником стоїть на похилому майданчику з ухилом 6% (a = 3°26’). Вектор загальної сили ваги навантажувача з вантажем не повинен вийти за його опорний контур. Значення коефіцієнту запасу стій-кості випливає з розрахункової схеми (Рис. 8).
Попередньо необхідно знайти координати загального центру ваги наван-тажувача з вантажем піднятим на максимальну висоту. Це можливо зробити склавши рівняння моментів сил.
Координата центру ваги вантажу з урахуванням нахилу вантажопідйом-ника назад на кут b
Координати загального центру ваги
Відстань від вісі симетрії до опорного контуру на рівні загального центу ваги навантажувача з вантажем
Коефіцієнт запасу стійкості
Рис. 8. Розрахункова схема до шостої умови стійкості
ЛІТЕРАТУРА
1. Веремеенко Е.И., Сверчков А.А. Современный портовый безрельсовый транспорт: Учебное пособие. – М.: Мортехинформреклама, 1992. – 108 с.
2. Мачульский И.И., Алепин Е.А. Машины напольного безрельсового транспорта. – М.: Машиностроение,1982. – 232 с. 3. Базанов О.Ф., Забегалов Г.В. Самоходные погрузчики. – М.: Машино-
строение, 1979. – 406 с.
Додаток 1 Зразок титульного листа
МІНІСТЕРСТВО ОСВІТИ І НАУКИ, МОЛОДІ ТА СПОРТУ УКРАЇНИ ОДЕСЬКИЙ НАЦІОНАЛЬНИЙ МОРСЬКИЙ УНІВЕРСИТЕТ
Кафедра «Підйомно-транспортні машини та механізація перевантажувальних робот»
Розрахунково-графічне завдання з дисципліни «Машини малої механізації» «Визначення основних параметрів портових машин малої механізації»
Варіант № *-** (* – номер групи; ** – номер прізвища студента за списком групи)
Виконав студ. _____ групи III курса ФМП
_____________________
Прийняв _______________
Одеса – 20__
Додаток 2
Вихідні дані до розрахунково-графічного завдання Група 1
Продовження Д 2
Група 2
Продовження Д 2
Група 3
Додаток 3 Довідкові матеріали
В довідкових матеріалах прийняті такі скорочення та позначення:
Привід – тип тягового приводу (від електродвигуна/від двигуна внутрішнього згоряння);
Q – вантажопідйомність навантажувача, т;
с – відстань до центру ваги номінального вантажу, мм; х – відстань від вісі передніх коліс до спинки вил (спредеру), мм; Y – колісна база, мм; GН – маса навантажувача, кг;
G1В/G2В – навантаження на вісь (передню/задню) з вантажем, кг; G1/G2 – навантаження на вісь (передню/задню) без вантажу, кг; nК1/nК2 – кількість коліс передніх/задніх (* = привідні);
b10/b11 – відстань між крайніми передніми/задніми колесами, мм; a / b – кут нахилу вантажопідйомника вперед/назад, град; h1/h4 – висота по складеному/розкладеному вантажопідйомнику, мм; h3 – найбільша висота підйому вантажного захвату, мм; h6 – висота по кабіні, мм; h7 – висота по сидінню оператора, мм; hЦ.В. – висота центру ваги навантажувача, мм; l2 – довжина навантажувача до спинки вил (спредеру), мм; b1/b2 – загальна ширина (передня/задня), мм;
s/e/l – розміри вил, мм; m1/m2 – дорожній просвіт під вантажопідйомником/по центру колісної бази, мм; SП – ширина проїзду, необхідна для розвороту в ньому навантажувача на 90° з піддоном 1000х1200мм поперек вил, мм;
SВ – ширина проїзду, необхідна для розвороту в ньому навантажувача на 90° з піддоном 800х1200мм вздовж вил, мм;
S20’/S40’ – ширина проїзду, необхідна для розвороту в ньому навантажувача на 90° з контейнером 1С/1А. RК – найменший можливий зовнішній радіус повороту корпусу навантажувача, мм; RC – найменший можливий середній радіус повороту навантажувача, мм; VВ/V – швидкість пересування з вантажем/без вантажу, км/г; lВ / l – максимальний ухил підйому шляху з вантажем/без вантажу, %;
tВ/t – час розгону з вантажем/без вантажу, c; P – потужність тягового двигуна, кВт
Продовження Д 3
Продовження Д 3
Рис. 9. Схема вилочних електронавантажувачів LINDE E12 – Е48
Продовження Д 3
Продовження Д 3
Рис. 10. Схема вилочних автонавантажувачів LINDE Н14 – Н50
Продовження Д 3
Продовження Д 3
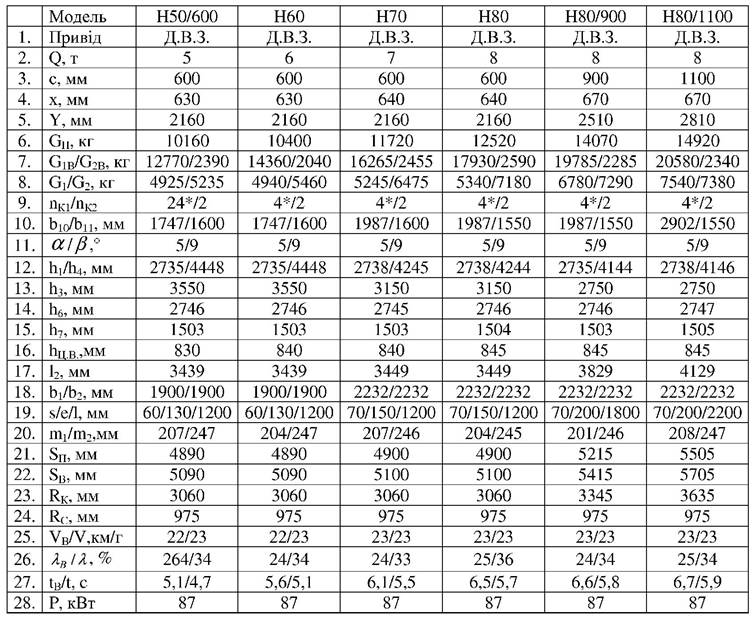
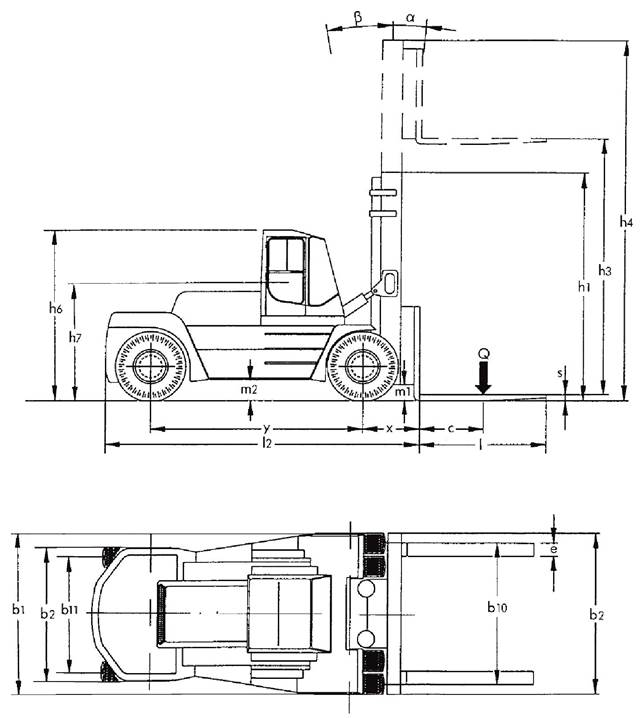
Рис. 11. Схема вилочних автонавантажувачів LINDE Н50/600 – Н80/1000
Продовження Д 3
Продовження Д 3
Рис. 12. Схема вилочних автонавантажувачів LINDE Н100 – Н180
Продовження Д 3
Продовження Д 3
Рис. 13. Схема вилочних автонавантажувачів LINDE Н180/1200 – Н520
Продовження Д 3
Продовження Д 3
Рис. 14. Схема контейнерних автонавантажувачів LINDE С360/3 – С400/5
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-08; просмотров: 311; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.14.70.203 (0.086 с.) |