
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Механика - наука, изучающая движение и взаимодействие материальных тел.Стр 1 из 9Следующая ⇒
Теоретическая механика Учебное пособие
Новосибирск, НГУ, 2020
Введение. Инерционные характеристики абсолютно твердого тела. Масса тела, а также геометрия пространственного распределения элементарных масс в объеме тела влияют на его способность к ускорению или замедлению поступательного движения или вращения тела вокруг неподвижной оси или подвижной (мгновенной) оси вращения твердого тела. Эти массовые свойства тела называются инерционностью тела. Определения.
Здесь вектор При движении тела центр масс движется в неподвижной системе координат и имеет текущее положение скорость центра масс ускорение центра масс
Выберем в пространстве некоторую прямую линию (ось) в направлении единичного вектора Для некоторого твердого тела с массой
Выберем в теле ортогональную систему координат
Из рисунка видно, что
Поэтому
где выражения в квадратных скобках
есть элементы матрицы линейного отображения
Симметричный линейный оператор Матрица оператора инерции в связанном с телом базисе имеет постоянные элементы, так как все элементарные массы тела имеют фиксированные расстояния от оси
Очевидно, что
Окончательно, осевой момент инерции тела относительно оси
Это есть билинейное отображение вектора Если в декартовых координатах обозначить
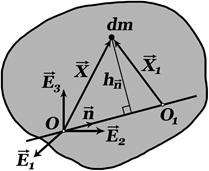
Так как выбор осей координат в теле произволен, то, для упрощения вычисления моментов инерции относительно любой оси с направлением Можно доказать, что ось геометрической симметрии однородного тела есть главная ось оператора инерции тела для всех точек оси. Главными осями инерции являются все оси, перпендикулярные к плоскости геометрической симметрии однородного тела. Заметим, что для вычисления осевого момента инерции Формула Гюйгенса - Штейнера. Показывает связь между осевыми моментами инерции относительно двух параллельных осей, одна из которых проходит через центр масс С тела:
Здесь d - расстояние между параллельными осями. Доказательство.
Так как
По определению центра масс твердого тела еще одно слагаемое в последней формуле равно нулю.
Криволинейные координаты. Положение точки тела можно задавать не только тремя декартовыми координатами, но и другими упорядоченными тройками скалярных параметров, взаимно однозначно и непрерывно связанных с декартовыми координатами.
Определение. Каждой точке
Назовем
Определение. Три вектора называются базисом криволинейных координат в точке Компоненты векторов базиса записаны в декартовом базисе. Векторы базиса изменяются при изменении положения точки
Длины
Каждый вектор базиса касается соответствующей координатной линии, вдоль которой изменяется только одна координата, а две другие фиксированы. Например, первая координатная линия запишется так: В криволинейной системе координат в каждой точке Определение. Поверхности уровня функций
называются координатными поверхностями, проходящими через точку Определение. Три вектора градиентов к соответствующим координатным поверхностям
называются векторами кобазиса в точке Изменение векторов базиса при изменении положения точки
В последнем выражении опущен знак суммирования по паре индексов суммирования Далее при написании формул будет использоваться правило Эйнштейна. Коэффициенты
Поэтому число различных символов Кристоффеля меньше двадцати семи. Можно показать, что векторы базиса и кобазиса взаимны, то есть их скалярные произведения равны символу Кронекера:
Символы Кристоффеля вычисляются следующим образом:
Векторы базиса Определение. Криволинейная система координат называется ортогональной системой координат, если векторы базиса ортогональны:
В этом случае вводится ортонормированный базис
Можно показать, что для ортогональных криволинейных координат нормированные векторы базиса и кобазиса совпадают. Скорость и ускорение точки тела в криволинейных координатах. Определение. Движение точки в криволинейных координатах записывается следующим образом:
Скорость и ускорение точки в базисе криволинейных координат:
Компоненты называются контравариантными компонентами векторов скорости и ускорения соответственно. Компоненты В последних формулах применяется следующее правило (Эйнштейна): если в одной части уравнения, (формулы), индекс свободный, то есть по нему нет суммирования, то по нему нет суммирования и в другой части уравнения. Физические компоненты векторов скорости Цилиндрическая ортогональная система координат,
Обратное отображение
Коэффициенты Ламе: Базис
Очевидно, что эти векторы взаимно ортогональны. Кобазис
Ненулевые символы Кристоффеля: Физические компоненты вектор ов скорости и ускорения имеют вид:
Полярная система координат. Если в цилиндрических координатах положить z = 0, то система координат называется полярной системой координат. Она описывает движение точки в одной плоскости. Для нее физические компоненты скорости и ускорения имеют вид
Прямое отображение
Обратное отображение
Коэффициенты Ламе: Векторы базиса и кобазиса связаны следующим образом:
Символы Кристоффеля имеют следующие значения:
Связь контравариантных и физических компонент скорости и ускорения имеет вид:
Вычислим третью физическую компоненту вектора ускорения:
Окончательно, физические компоненты векторов скорости и ускорения в сферических координатах вычисляются по следующим формулам:
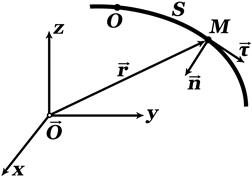
Движение точки вдоль траектории. Скорость и ускорение точки в проекциях на естественный ортонормированный базис. Траектория какой-либо точки тела есть геометрическое место всех последовательных положений точки при движении тела. Принимаем, что это есть некоторая гладкая кривая линия в Пусть движение точки тела (далее точки) задано в декартовых координатах:
Выберем на кривой начало отсчета О дуговой координаты s точки М при ее движении как расстояние вдоль кривой от начального положения (точки О) до ее текущего положения М:
Касательный к траектории вектор
Вектор главной нормали
Величина В каждой точке траектории три единичных вектора Движение точки в естественной форме
Скорость точки
а её проекция на ось
Ускорение точки
Они называются так: касательное
Если траектория точки есть окружность с радиусом R, то кривизна окружности равна, по определению, радиусу окружности, и поэтому нормальное ускорение точки есть
Определения. 1. Сила, определяющая движение тела, называется центральной, если ее линия действия в любом положении тела проходит через одну и ту же неподвижную точку О.
3.Элементарной работой силы
4. Сила 5. Сила
Функция U для данной силы называется ее потенциальной энергией. По определению потенциальной энергии, вектор суммы потенциальных сил имеет потенциальную энергию, равную сумме потенциальных энергий всех сил. Элементарная работа силы контактного взаимодействия тела со связями. При точечном контакте тела со связью линия действия силы проходит через точку контакта. Покажем, что работа дискретной силы контакта не зависит от точки приложения силы на ее линии действия. Действительно, пусть одна из точек линии действия силы
так как сила То же самое будет для каждой силы из системы сил твердого тела. Таким образом, элементарная работа дискретной системы сил на элементарных перемещениях твердого тела определяется только положением в теле их линий действия, то есть направлением сил и одной из точек на их линиях действия. Аксиомы реакций связей.
Силы реакций перпендикулярны (направлены по нормали) к плоскостям (поверхностям).
При этом сила трения в покое тела не превосходит своего максимального значения (при движении) Нормальная часть реакции поверхности
Тело, соединенное шарниром с неподвижной опорой, может поворачиваться вокруг оси шарнира
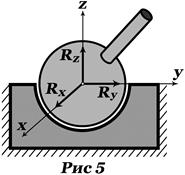
5. Сферический шарнир. Рисунок 5.
6. Подпятник и подшипник. Рисунок 6. Сила реакции подпятника
Коэффициент сопротивления качению
Цилиндрический шарнир на подвижной опоре (в точке
Дифференциальный принцип механики. Рассматривается система N абсолютно твердых тел, на положения и, как следствие, на движение тел наложены геометрические (кинематические) ограничения (связи). Тела системы взаимодействуют между собой и с другими телами механической системы, не включенными в систему Понятия и определения. Уравнения связей системы тел. Положение системы по отношению к инерциальной системе отсчета определяют 6 N скалярных параметров
а движение
Элементарные перемещения Несовместимые со связями элементарные перемещения Силы инерции твердого тела. Главный вектор и главный момент сил инерций тела. Поле элементарных сил инерций
по полю абсолютных ускорений При этом поле ускорений имеет вид:
Здесь Определение. Для тела вектор
есть главный вектор сил инерций, а вектор
есть главный момент сил инерций относительно центра масс С. Докажем, что в системе координат, связанной с телом, главный момент сил инерции вычисляется по формуле
Здесь Доказательство:
Если в теле есть неподвижная точка Силы взаимодействия тел механической системы подразделяют ся на активные силы Элементарная работа сил инерции твердого тела на виртуальных перемещении тела вычисляется так:
Здесь элементарное перемещение центра масс
Доказательство:
Если в теле есть неподвижная точка
где вектор
Если в плоском движении тела момент импульса
Здесь Если в теле имеется неподвижная ось вращения
Дифференциальный ПРИНЦИП механики систем с геометрическими (голономными) связями. При движении системы
Принцип (аксиома) применим для любого количества Дифференциальный принцип механики на виртуальных перемещениях: принцип Даламбера – Лагранжа. Дифференциальный принцип механики на Возможных (виртуальных) перемещениях применяют для нахождения движения системы. Принцип дает возможность написать дифференциальные уравнения движения системы в случаях, когда элементарная работа всех сил контактного взаимодействия системы равна нулю:
В таком случае говорят, то есть при идеальных связях. В этом случае из дифференциального принципа следует, что сумма элементарных работ всех активных сил и всех сил инерций системы равна нулю на любых виртуальных перемещениях системы:
Эту форму дифференциального принципа называют принцип Даламбера - Лагранжа. Используя уравнения связей, вектор положения точек тела Поэтому принцип Даламбера - Лагранжа можно представить в следующем виде:
где В силу независимости и произвольности виртуальных перемещений
Эти уравнения есть дифференциальные уравнения движения системы тел с идеальными связями в обобщенных координатах. Они не включают неизвестные силы контактных взаимодействий. Для системы
Консервативнаясистема. Положения равновесия консервативных систем. Консервативная система имеет геометрические стационарные связи, сумма элементарных работ сил реакций идеальных связей равна нулю, а все работающие силы потенциальны. Положения равновесия определяются свойствами сил взаимодействий и виртуальными перемещениями в этих положениях. А именно: в каждом положении равновесия равны нулю виртуальные работы силового поля и сил реакций связей на любых виртуальных перемещениях:
Это свойство сил взаимодействий примем за определение положений равновесия. Так как для потенциальных сил в положениях равновесия виртуальную работу активных сил можно выразить через дифференциал потенциальной энергии, то есть
то равенство нулю полного дифференциала
|
|||||||||
|
|
Последнее изменение этой страницы: 2021-04-05; просмотров: 89; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.137.171.121 (0.198 с.) |
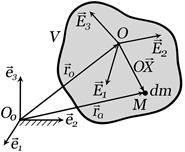 Центр масс С тела есть постоянная в теле точка в системе координат
Центр масс С тела есть постоянная в теле точка в системе координат  , связанной с телом:
, связанной с телом:
 определяет в теле положение элементарной массы тела
определяет в теле положение элементарной массы тела  по отношению к началу подвижной системы координат,
по отношению к началу подвижной системы координат,  - её элементарный объем. Удельная массовая плотность
- её элементарный объем. Удельная массовая плотность  . Массу всего тела обозначим
. Массу всего тела обозначим 
 и
и
 Распределение масс твердого тела по отношению к оси.
Распределение масс твердого тела по отношению к оси. , имеющую одной из своих точек точку
, имеющую одной из своих точек точку  тела.
тела. определим некоторую скалярную величину
определим некоторую скалярную величину  , задающую расположение всех элементарных масс тела
, задающую расположение всех элементарных масс тела  по отношению к оси. Назовем ее моментом инерции телаотносительно оси или осевым моментом инерции тела:
по отношению к оси. Назовем ее моментом инерции телаотносительно оси или осевым моментом инерции тела:
 косинусы углов между вектором
косинусы углов между вектором  ,
, 
 .
.
 можно представить в виде:
можно представить в виде:

 , сопоставляющего вектору
, сопоставляющего вектору 
 , относительно осей координат, а недиагональные элементы называются центробежные моменты инерции
, относительно осей координат, а недиагональные элементы называются центробежные моменты инерции  :
:


 тела, в число – осевой момент инерции.
тела, в число – осевой момент инерции. расстояние от элементарной массы dm до оси О z, то
расстояние от элементарной массы dm до оси О z, то
 относительно любой оси часто удобней выбирать начало координат не в любой точке
относительно любой оси часто удобней выбирать начало координат не в любой точке  тела.
тела.
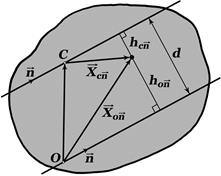 Из рисунка видно, что
Из рисунка видно, что 
 то
то
 с координатами
с координатами  сопоставим три упорядоченных числа
сопоставим три упорядоченных числа  по некоторому правилу:
по некоторому правилу: 
 , i = 1, 2, 3, криволинейными координатами точки М. Функции
, i = 1, 2, 3, криволинейными координатами точки М. Функции  взаимно однозначны и непрерывно дифференцируемы по всем координатам и имеют обратные функции в некоторой области взаимной однозначности
взаимно однозначны и непрерывно дифференцируемы по всем координатам и имеют обратные функции в некоторой области взаимной однозначности

 .
. :
:
 векторов базиса (коэффициенты Ламе) вычисляются по формулам:
векторов базиса (коэффициенты Ламе) вычисляются по формулам:

 координатные линии пересекаются в этой точке.
координатные линии пересекаются в этой точке.

 .
. когда один из них находится вверху, а другой – внизу (правило Эйнштейна).
когда один из них находится вверху, а другой – внизу (правило Эйнштейна). называются символами Кристоффеля второго рода. Они симметричны по нижним индексам:
называются символами Кристоффеля второго рода. Они симметричны по нижним индексам:


 в общем случае не ортогональны и не нормированы, однако имеются системы координат, для которых это не так.
в общем случае не ортогональны и не нормированы, однако имеются системы координат, для которых это не так.






 называются физическими компонентами векторов скорости и ускорения.
называются физическими компонентами векторов скорости и ускорения. и ускорения
и ускорения  в ортонормированном базисе
в ортонормированном базисе  имеют обычную физическую размерность.
имеют обычную физическую размерность.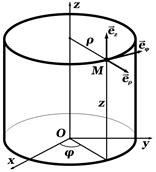 Прямое отображение
Прямое отображение  :
: 
 :
:






 :
:
 .
. Сферическая ортогональная система координат
Сферическая ортогональная система координат







 .
.

 Далее, примем в качестве параметра вместо времени t дуговую координату s:
Далее, примем в качестве параметра вместо времени t дуговую координату s:
 определим следующим образом:
определим следующим образом: 

 называется кривизной кривой в точке М, а величина
называется кривизной кривой в точке М, а величина  называется радиусом кривизны.
называется радиусом кривизны. и
и  взаимно перпендикулярны и образуют естественный ортонормированный базис, ориентация векторов которого определяется видом траектории и положением точки М на траектории.
взаимно перпендикулярны и образуют естественный ортонормированный базис, ориентация векторов которого определяется видом траектории и положением точки М на траектории.
 направлена по касательной
направлена по касательной 

 раскладывается по естественному базису так:
раскладывается по естественному базису так:
 и нормальное
и нормальное  ускорения. Окончательно:
ускорения. Окончательно:

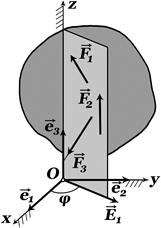 2. Говорят, что с илы имеют осевую симметрию, е сли в любом положении движущегося тела линии действия сил расположены в одной и той же плоскости, связанной с телом, и проходящей через некоторую неподвижную ось координат.
2. Говорят, что с илы имеют осевую симметрию, е сли в любом положении движущегося тела линии действия сил расположены в одной и той же плоскости, связанной с телом, и проходящей через некоторую неподвижную ось координат. на элементарном перемещении
на элементарном перемещении  любой точки тела, лежащей на линии действия силы называется скаляр
любой точки тела, лежащей на линии действия силы называется скаляр  , равный скалярному произведению вектора силы
, равный скалярному произведению вектора силы  :
:

 есть точка
есть точка  , а другая
, а другая  . Определим элементарную работу силы
. Определим элементарную работу силы 

 .
.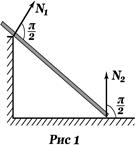 1. Гладкая плоскость, поверхность, гладкая опора. Рисунок 1.
1. Гладкая плоскость, поверхность, гладкая опора. Рисунок 1. 2. Невесомая нерастяжимая нить. Рисунок 2. Сила реакции нити
2. Невесомая нерастяжимая нить. Рисунок 2. Сила реакции нити  направлена вдоль нити от тела.
направлена вдоль нити от тела.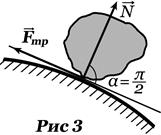 3. Поступательное (без вращения) скольжение тела по гладкой (без трения) поверхности (плоскости).
3. Поступательное (без вращения) скольжение тела по гладкой (без трения) поверхности (плоскости).
 :
:  .
. перпендикулярна к поверхности. Коэффициент трения скольжения
перпендикулярна к поверхности. Коэффициент трения скольжения  не имеет азмерности.
не имеет азмерности. 4. Цилиндрический шарнир, соединяющий тело с неподвижной опорой. Рисунок 4.
4. Цилиндрический шарнир, соединяющий тело с неподвижной опорой. Рисунок 4. При отсутствии трения и скольжения тела вдоль оси, а также при плоской нагрузке на тело сила реакции оси шарнира имеет неизвестную величину и неизвестное направление в плоскости, перпендикулярной к оси шарнира:
При отсутствии трения и скольжения тела вдоль оси, а также при плоской нагрузке на тело сила реакции оси шарнира имеет неизвестную величину и неизвестное направление в плоскости, перпендикулярной к оси шарнира: 
 Цилиндрический (подвижный) шарнир может связывать два подвижных тела. Аксиома реакции связи при этом не изменяется.
Цилиндрический (подвижный) шарнир может связывать два подвижных тела. Аксиома реакции связи при этом не изменяется.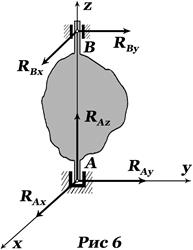 Реакция опоры шарнира на тело, соединенное с шаровой частью шарнира, при произвольной нагрузке на тело может иметь любое направление в пространстве. Поэтому
Реакция опоры шарнира на тело, соединенное с шаровой частью шарнира, при произвольной нагрузке на тело может иметь любое направление в пространстве. Поэтому 
 :
:
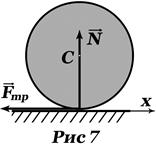 7. Качение цилиндра (без скольжения). Рисунок 7. Касание цилиндра с плоскостью происходит в одной точке. Сила трения не связана с нормальной реакцией и зависит от движения тела.
7. Качение цилиндра (без скольжения). Рисунок 7. Касание цилиндра с плоскостью происходит в одной точке. Сила трения не связана с нормальной реакцией и зависит от движения тела.
 8. Качение цилиндра (без скольжения) при наличии момента сопротивления качению. Рисунок 8. Касание цилиндра с плоскостью происходит не в одной точке. Главный вектор сил реакций
8. Качение цилиндра (без скольжения) при наличии момента сопротивления качению. Рисунок 8. Касание цилиндра с плоскостью происходит не в одной точке. Главный вектор сил реакций  и главный момент сил реакций
и главный момент сил реакций  относительно точки
относительно точки 
 имеет размерность длины (метр).
имеет размерность длины (метр).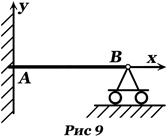 9. Реакция балки, заделанной в стену. Рисунок 9. При нагрузке на балку в плоскости
9. Реакция балки, заделанной в стену. Рисунок 9. При нагрузке на балку в плоскости  реакция стены определяется главным вектором заделки
реакция стены определяется главным вектором заделки  и главным моментом заделки
и главным моментом заделки  :
: 
 .
. тел.
тел. (координаты, углы),
(координаты, углы),  . Положение
. Положение 

 удовлетворяет еще и кинематическим уравнениям связей, полученным из уравнений связи дифференцированием их по времени один и два раза. Скалярные функции векторного аргумента
удовлетворяет еще и кинематическим уравнениям связей, полученным из уравнений связи дифференцированием их по времени один и два раза. Скалярные функции векторного аргумента  дважды непрерывно дифференцируемы по времени, а функционально независимые уравнения связей для любого момента времени позволяют выбрать
дважды непрерывно дифференцируемы по времени, а функционально независимые уравнения связей для любого момента времени позволяют выбрать  независимых элементарных перемещений
независимых элементарных перемещений  из уравнений связей в вариациях
из уравнений связей в вариациях
 называются возможными (виртуальными) перемещениями, а скалярные параметры (координаты и углы)
называются возможными (виртуальными) перемещениями, а скалярные параметры (координаты и углы)  которые соответствуют, независимым из них
которые соответствуют, независимым из них  , называют обобщенные координаты. Говорят, что в иртуальные перемещения совместимы со связями.
, называют обобщенные координаты. Говорят, что в иртуальные перемещения совместимы со связями. системы тел произвольны, независимы и не удовлетворяют уравнениям связей.
системы тел произвольны, независимы и не удовлетворяют уравнениям связей.  твердого тела определим по Даламберу
твердого тела определим по Даламберу 
 .
.
 есть абсолютное ускорение центра масс тела,
есть абсолютное ускорение центра масс тела,  есть абсолютная угловая скорость, а
есть абсолютная угловая скорость, а  есть абсолютное угловое ускорение тела. В системе координат, связанной с телом, векторы
есть абсолютное угловое ускорение тела. В системе координат, связанной с телом, векторы 


 есть оператор инерции тела относительно осей координат, связанных с телом, с началом в центре масс С. Элементы его матрицы
есть оператор инерции тела относительно осей координат, связанных с телом, с началом в центре масс С. Элементы его матрицы  постоянны.
постоянны.
 относительно неподвижной точки.
относительно неподвижной точки. бесконтактного взаимодействия тел и силы контактного взаимодействия
бесконтактного взаимодействия тел и силы контактного взаимодействия  (акции и реакции). Добавим к ним для каждого тела силы инерции
(акции и реакции). Добавим к ним для каждого тела силы инерции  и вычислим их элементарную работу.
и вычислим их элементарную работу.

 и элементарный угол поворота
и элементарный угол поворота  тела определяются полем элементарных перемещений точек тела
тела определяются полем элементарных перемещений точек тела
 тела параллелен вектору угловой скорости
тела параллелен вектору угловой скорости 
 есть осевой момент инерции тела относительно оси
есть осевой момент инерции тела относительно оси  . Для этого необходимо, чтобы эта ось была главной осью оператора инерции тела.
. Для этого необходимо, чтобы эта ось была главной осью оператора инерции тела. , проходящая через некоторую точку
, проходящая через некоторую точку 
 и его вариацию
и его вариацию  и их виртуальные перемещения
и их виртуальные перемещения  .
. 
 .
. , уравнение дифференциального принципа распадаются на n уравнений
, уравнение дифференциального принципа распадаются на n уравнений
 .
.
 потенциальной энергии
потенциальной энергии 
 , означает, что положения равновесия доставляют экс
, означает, что положения равновесия доставляют экс


